
TRƯỜNG ĐẠI HỌC PHẠM VĂN ĐỒNG
KHOA KỸ THUẬT CÔNG NGHỆ
BÀI GIẢNG MÔN HỌC
ĐIỀU KHIỂN THỦY KHÍ VÀ
LẬP TRÌNH PLC
Ths. Phạm Văn Anh (Chủ biên)
Ths. Đào Minh Đức

Bài giảng: Điều khiển thủy khí và lập trình PLC
Trang 3
LỜI NÓI ĐẦU
Ở nước ta hiện nay, công nghiệp hóa – hiện đại hóa đang bước vào giai đoạn
phát triển mạnh mẽ. Trong nhiều lĩnh vực, đặc biệt là cơ khí – tự động hóa có nhiều
bước phát triển vượt bậc, góp phần củng cố và xây dựng cơ sở vật chất hạ tầng cho
nền kinh tế.
Góp phần vào những nỗ lực này, các cán bộ, giảng viên và toàn thể các sinh
viên của đại học Phạm Văn Đồng cũng đang từng bước đổi mới, nâng cao trình độ
chuyên môn, nhằm tạo ra những bước chuyển lớn trong đào tạo và nâng cao chất
lượng tạo.
Từ những yêu cầu trên, nhóm biên soạn đã tập hợp từ nhiều tài liệu để biên tập
thành bài giảng này. Tài liệu này được sử dụng cho sinh viên các lớp đại học tín chỉ
với thời lượng 30 tiết. Chúng tôi hy vọng đây sẽ là tài liệu thiết thực cho các bạn
sinh viên chuyên nghành Công Nghệ Kỹ Thuật Cơ Khí tại trường đại học Phạm
Văn Đồng.
Trong quá trình biên soạn, chắc chắn tài liệu không tránh khỏi có những sai
sót. Mọi góp ý xin gửi về địa chỉ Khoa Kỹ Thuật Công Nghệ - Trường Đai học
Phạm Văn Đồng. Chúng tôi xin chân thành cảm ơn.
Bài giảng: Điều khiển thủy khí và lập trình PLC
Trang 4
Chương 1 ĐIỀU KHIỂN LOGIC
Mục tiêu
Chương này trang bị cho các sinh viên kiến thức về đại số Boole, ứng dụng
của lý thuyết điều khiển logic như: Tối giản các phương trình logic bằng biến đối
toán học hoặc bảng Karnaugh và nắm vững các phần tử điều khiển logic trong hệ
thống thủy lực khí nén.
1.1 Khái niệm cơ bản
Khái niệm “điều khiển” theo tiêu chuẩn DIN 19 226 (Cộng hòa liên bang
Đức): là quá trình của một hệ thống, trong đó dưới tác động của một hay nhiều đại
lượng vào, những đại lượng được thay đổi theo một quy luật nhất định của hệ
thống đó.
Đặc trưng cho quá trình điều khiển là mạch tác động hở (hệ thống điều khiển
hở). Cấu trúc của hệ thống điều khiển hở được biểu diễn như hình dưới:
Hình 1.1 Hệ thống điều khiển hở
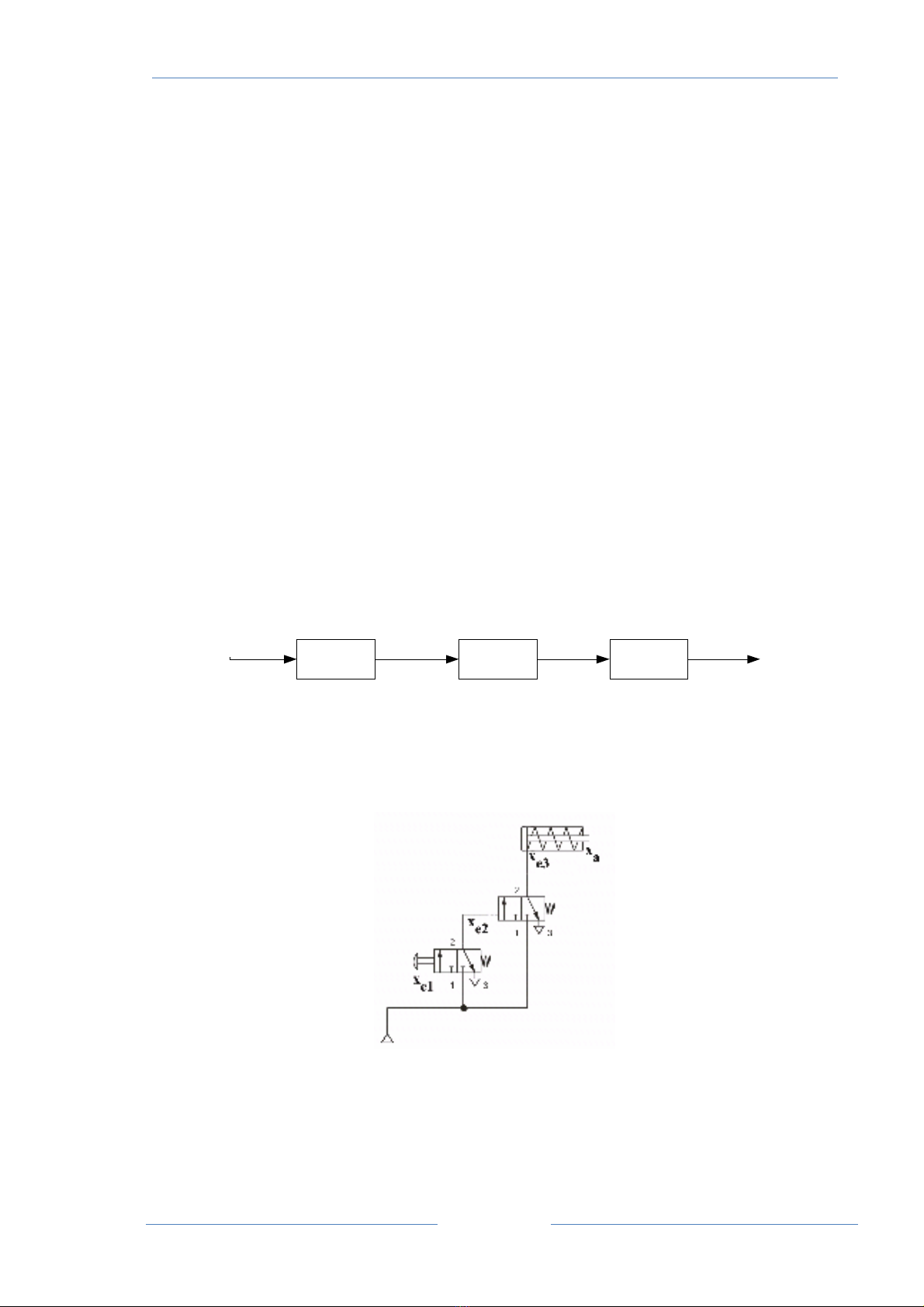
Hệ thống có các tín hiệu vào xe và tín hiệu ra xa . Ví dụ như mạch điều khiển
đơn giản của một xilanh khí nén:
Hình 1.2 Mạch điều khiển xilanh
Một hệ thống điều khiển bao gồm: thiết bị điều khiển và đổi tượng điều khiển.
Bài giảng: Điều khiển thủy khí và lập trình PLC
Trang 5
Hình 1.3 Sơ đồ hệ thống điều khiển
+ Đối tượng điều khiển là các loại thiết bị, máy móc..
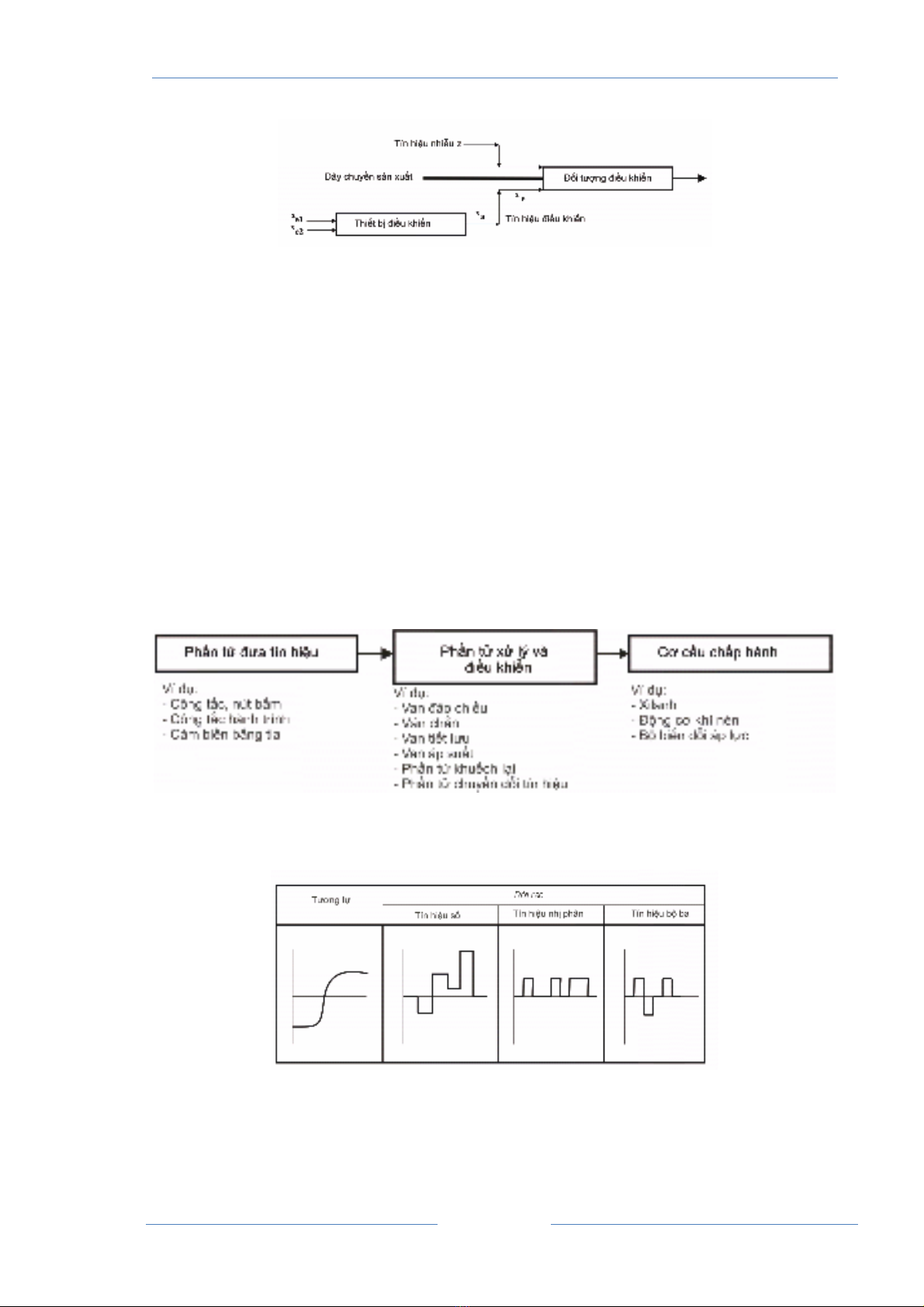
+ Thiết bị điều khiển bao gồm: phần tử đưa tín hiệu, phần tử xử lý và điều
khiển, cơ cấu chấp hành.
+ Tín hiệu điều khiển là đại lượng ra xa của thiết bị điều khiển và đại lượng
vào xe của đối tượng điều khiển.
+ Tín hiệu nhiễu z là đại lượng được tác động từ bên ngoài vào hệ thống và
gây ảnh hưởng xấu lên hệ thống.
Hình 1.4 Các phần tử của mạch điều khiển
Hình 1.5 Phân loại tín hiệu
Bài giảng: Điều khiển thủy khí và lập trình PLC
Trang 6
- Khi tín hiệu thay đổi liên tục tương ứng với các giá trị thông tin biến đổi,
được gọi là tín hiệu tương tự.
- Khi tín hiệu mà biên độ thay đổi gián đoạn, được gọi là tín hiệu rời rạc.
- Khi giá trị của tín hiệu thay đổi được định nghĩa dưới dạng mã nhị phân, gọi
là tín hiệu số.
- Tín hiệu nhị phân là tín hiệu số chỉ có hai giá trị (0 và 1) và tín hiệu bộ ba là
tín hiệu có ba giá trị.
Ví dụ: tín hiệu điều khiển khí nén phần lớn sử dụng tín hiệu nhị phân: Đóng và
mở, có và không có khí nén…
1.2 Các phần tử logic
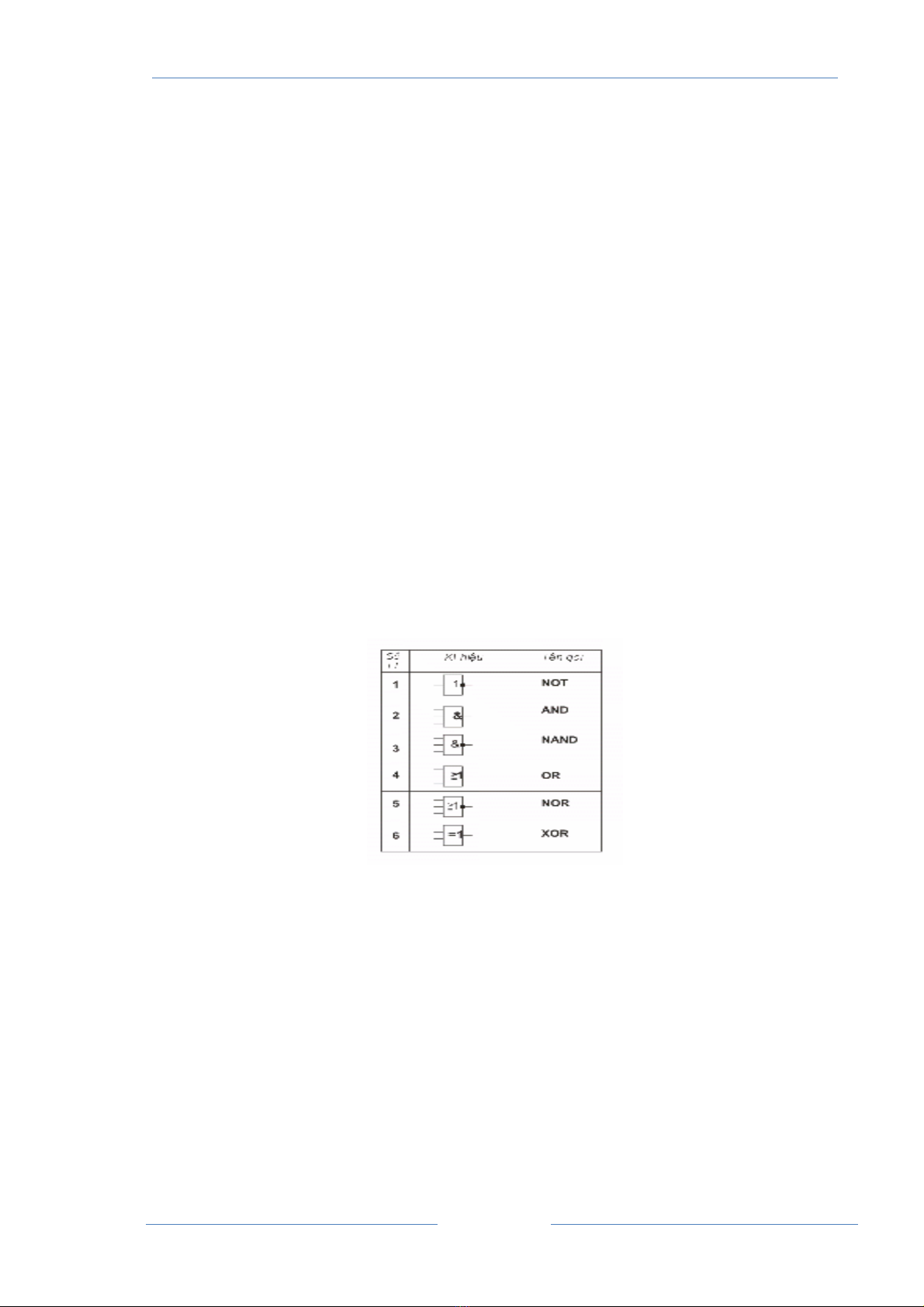
Các phần tử logic được ký hiệu theo tiêu chuẩn DIN 40 100 (cộng hòa liên
bang Đức) được ký hiệu trong bảng sau:
Bảng 1.1 Phần tử cơ bản của mạch logic
1.2.1 Phần tử logic NOT (đảo)
Phần tử logic NOT được minh họa trong hình dưới đây. Khi nhấn nút b1 rơle c
có điện, bóng đèn h mất điện và ngược lại khi nhả b1, bóng đèn h có điện.






![Giáo trình Thực hành PLC Trường Cao đẳng Quốc tế Hà Nội [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260410/songngu_011/135x160/80441775896059.jpg)

![Giáo trình PLC nâng cao Trường Cao đẳng Quốc tế Hà Nội [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260410/songngu_011/135x160/76771775897727.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)