HỌC VIỆN CÔNG NGHỆ BƯU CHÍNH VIỄN THÔNG
BÀI GIẢNG MÔN
CƠ SỞ ĐIỀU KHIỂN TỰ ĐỘNG
Giảng viên: Ths. VũAnh Đào
Điệnthoại/E-mail: anhdaoptit@gmail.com
Bộmôn: Kỹthuậtđiệntử
Họckỳ/Nămbiênsoạn: 2009
Giới thiệu môn học
•Mục đích:
Trang bịcho sinh viên những kiến thức cơ bản để phân tích và tổng hợp hệthống
điều khiển kỹthuật trong miền thời gian và miền tần sốbằng công cụtoán học, tập
trung chủyếu là các vấn đề trong miền liên tục. Môn học thuộc lĩnh vực lý thuyết
điều khiển, và là những cơ sở cơ bản nhất của lý thuyết hệthống điều khiển được
ứng dụng cho kỹthuật. Các phương pháp được đề cập đến để phân tích và tổng hợp
hệthống là phương pháp kinh điển và phương pháp không gian trạng thái. Sinh
viên được làm quen với phương pháp sửdụng phần mềm Matlab dùng để mô phỏng
và tổng hợp hệthống
•Thời lượng: 3 đvht
–Lý thuyết : 37 tiết
–Kiểm tra : 2 tiết
–Thí nghiệm: 6 tiết
•Điểm thành phần:
–Chuyên cần : 10%
–Kiểm tra : 10%
–Thí nghiệm : 10%
–Thi kết thúc học phần: 70%
Nội dung môn học
PHẦN I. HỆTHỐNG ĐKTĐ TUYẾN TÍNH LIÊN TỤC
Chương 1: Mô tảtoán học hệthống ĐKTĐ liên tục
Chương 2: Đặc tính của các khâu cơ bản và của hệthống ĐKTĐ liên tục
Chương 3: Khảo sát tính ổn định của hệthống ĐKTĐ liên tục
Chương 4: Khảo sát chất lượng hệthống ĐKTĐ liên tục
Chương 5: Tổng hợp hệthống ĐKTĐ liên tục
PHẦN II. HỆTHỐNG ĐKTĐ TUYẾN TÍNH RỜI RẠC
Chương 6: Mô tảtoán học hệthống ĐKTĐ rời rạc
Chương 7: Phân tích và thiết kếhệthống ĐKTĐ rời rạc
Tài liệu tham khảo
[1]. Vũ Anh Đào, Đặng Hoài Bắc, Bài giảng Cơ sở điều khiển tự động,
HVCNBCVT, 2008.
[2]. Phạm Công Ngô, Lý thuyết Điều khiển tự động, NXB KHKT, 2001
[3]. Nguyễn Văn Hoà, Cơ sởLý thuyết điều khiển tự động, NXB KHKT, 2001.
[4]. Nguyễn Thương Ngô, Lý thuyết Điều khiển tự động thông thường và hiện
đại, NXB KHKT, 2005.
[5]. Benjamin C. Kuo, Automatic Control Systems, Prentice - Hall
International Editions, Seventh Edition 1995.
Chương 1. Mô tảtoán họchệthống ĐKTĐ
1.1 Giớithiệu chung
•ĐK học là khoa học nghiên cứuvềcác quá trình thu thập, xửlý tín hiệuvàđiều
khiển trong mọilĩnh vựcđờisống xã hội, khoa học công nghệ, môi trường...
•Điều khiểnhọckỹthuật là khoa học nghiên cứuvềquá trình thu thập, xửlý tín hiệu
và điều khiểncácquátrìnhvàhệthống thiếtbịkỹthuật. Khái niệmđiều khiểnđược
hiểulàtậphợptấtcảcác tác động mang tính tổchứccủamột quá trình nhằmđạt
đượcmụcđích mong muốncủa quá trình đó. Hệthống điều khiển mà không có sự
tham gia trựctiếpcủa con người trong quá trình điều khiểnđượcgọilàđiềukhiển
tựđộng.
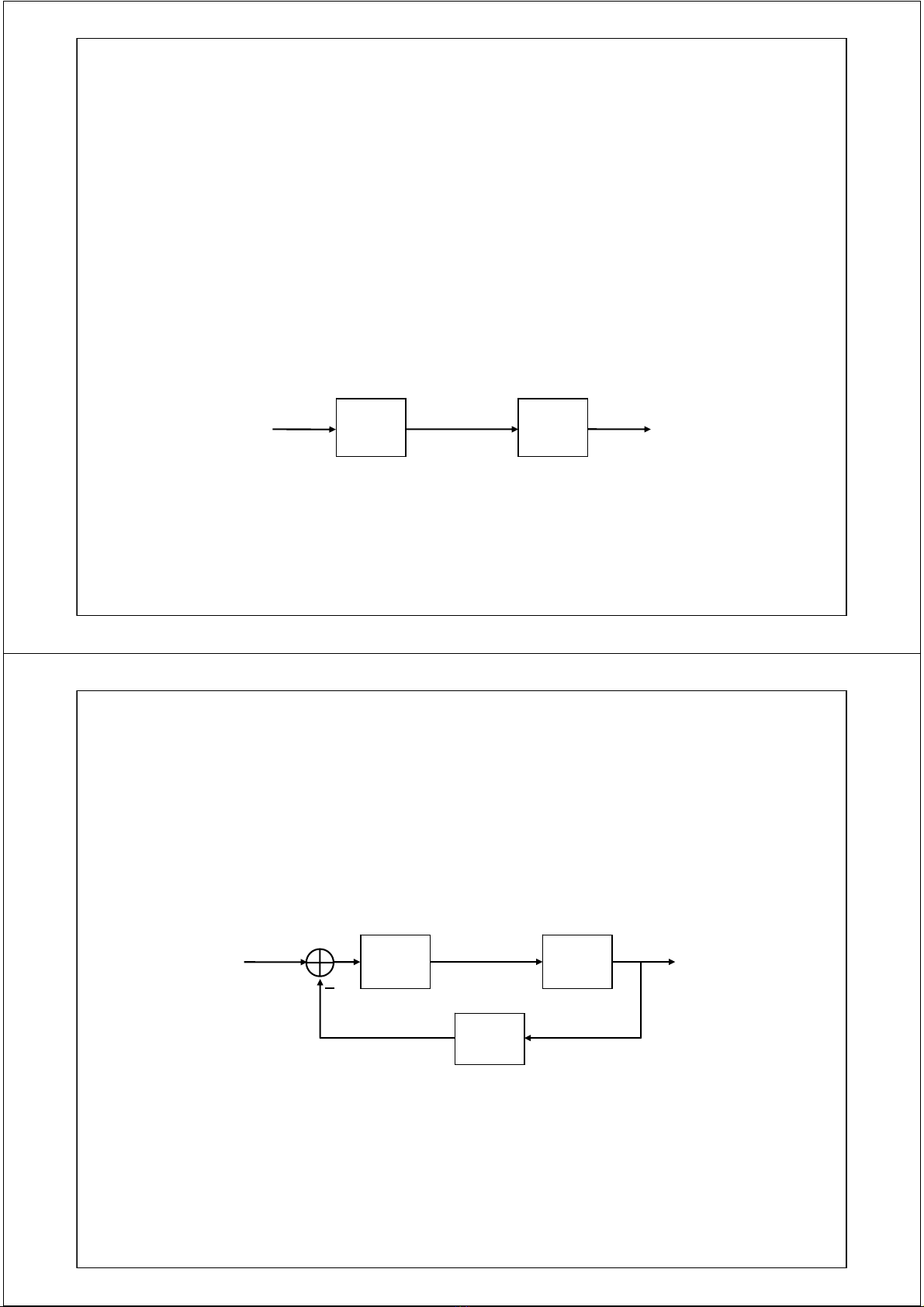
•Một HTĐKTĐ hở(không có đường phảnhồi) mô tảtrong hình 1.1 gồm hai thành
phầncơbảnlàđốit
ượng điềukhiển (Object) và thiếtbịđiềukhiển (Controller):
•Nhiệmvụcơbảncủađiều khiểntạo ra tín hiệuđiều khiểnđể có được giá trịđầura
mong muốn. Những tác động từbên ngoài lên hệthống đượcgọilàtácđộng nhiễu
12/31/2009 5VũAnh Đào - PTIT
Thiếtbị
điều khiển
Đốitượng
điều khiển
Tín hiệuvào Tín hiệura
Tínhiệuđiềukhiển
Hình 1.1 Hệthống điềukhiểnhở
Chương 1. Mô tảtoán họchệthống ĐKTĐ...
1.1.1 Sơđồkhối
•Hệthống có đường phảnhồigọilàhệkín, mô tảtrong hình 1.2. fđượcgọi là tín
hiệuphảnhồi, elà sai lệch. Trong thựctế, các hệthống điều khiểnđượcsửdụng
đềulàcáchệkín, tức thông tin đầurađượcđưa quay trởvềđầuvàođể góp phần
tạotatínhiệuđiều khiển.
•Có ba phương thứcđiều khiểnlàphương thứcđiều khiển theo chương trình,
phương thức bù nhiễuvàphương thứcđiều khiểntheosailệch (đây là phương pháp
điều khiểnphổbiếnnhất)
12/31/2009 6VũAnh Đào - PTIT
Thiếtbị
điều khiển
Đốitượng
điều khiển
Tín hiệura
Tín hiệuđiềukhiển
Hình 1.2 Hệthống điềukhiểnkín
Thiếtbị
đo
uex y
f
Chương 1. Mô tảtoán họchệthống ĐKTĐ...
1.1.2 Phân loạihệthống ĐKTĐ
•Theo tính chấtcủa các phầntử, HTĐKTĐ được phân làm 2 loạichínhlàhệ
tuyếntínhvàhệphi tuyến.
–Hệtuyến tính: tấtcảcác phầntửđềutuyến tính.
–Hệphi tuyến: có ít nhất1 phầntửcó tính phi tuyến.
•Dựa vào tính chấttruyềntínhiệu, HTĐKTĐ được phân làm 2 loạilàhệ
liên tụcvàhệrờirạc (các khái niệmliêntụcvàrờirạcởđây đượchiểutheo
biếnthờigian).
–Hệliên tục: thông tin truyềnđiliêntụcởtấtcảcác khâu.
–Hệrờirạc: thông tin truyềnđibịgián đoạnởmộtkhâunàođó
•Dựavàolượng thông tin thu thậpban đầuvề ĐTĐK và tính chấtcủa nó, HTLTTT
đượcphânralàm2 loạilàhệthông thường và hệthích nghi
–Hệthông thường: cấutrúcvàthamsốcủathiếtbịđiềukhiển là không
đổivớiđốitượng điềukhiểncụthể
–Hệthích nghi: Khi đốitượng điều khiển có thông tin ban đầu không
đầyđủ hay quá trình công nghệcó yêu cầuđặcbiệt
12/31/2009 7VũAnh Đào - PTIT
Chương 1. Mô tảtoán họchệthống ĐKTĐ...
1.2 Các phương pháp mô tảđộng học
1.2.1 Mô tảtrong miềnthờigian
•Hàm truyềnđạt: : là tỉsốgiữa tín hiệuravàtínhiệu vào theo biếnđổi Laplace với
điềukiệnđầutriệttiêu
–Một HTĐKTĐ thường đượcbiểudiễndướidạng PTVP dạng tổng quát:
Biếnđổi Laplace 2 vế, ta có hàm truyềnđạt:
Và phương trình đặctrưng:
– Nghiệmtửsốcủahàmtruyềnđạtđượcgọilàcácđiểm không (zero) và nghiệmmẫu
sốđượcgọilàcácđiểmcực(pole)
12/31/2009 8VũAnh Đào - PTIT
() ()
{
}
()
{}
L
y
t
Wp Lut
=
11
01 1 01 1
11
...
nn mm
nn mm
nn mm
dy d y dy du d y du
aa aaybb b bu
dt dt
dt dt dt dt
−−
−−
−−
++++=++++…
1
01 1
... 0
nn nn
ap ap a p a
−−
++++=
Chương 1. Mô tảtoán họchệthống ĐKTĐ...
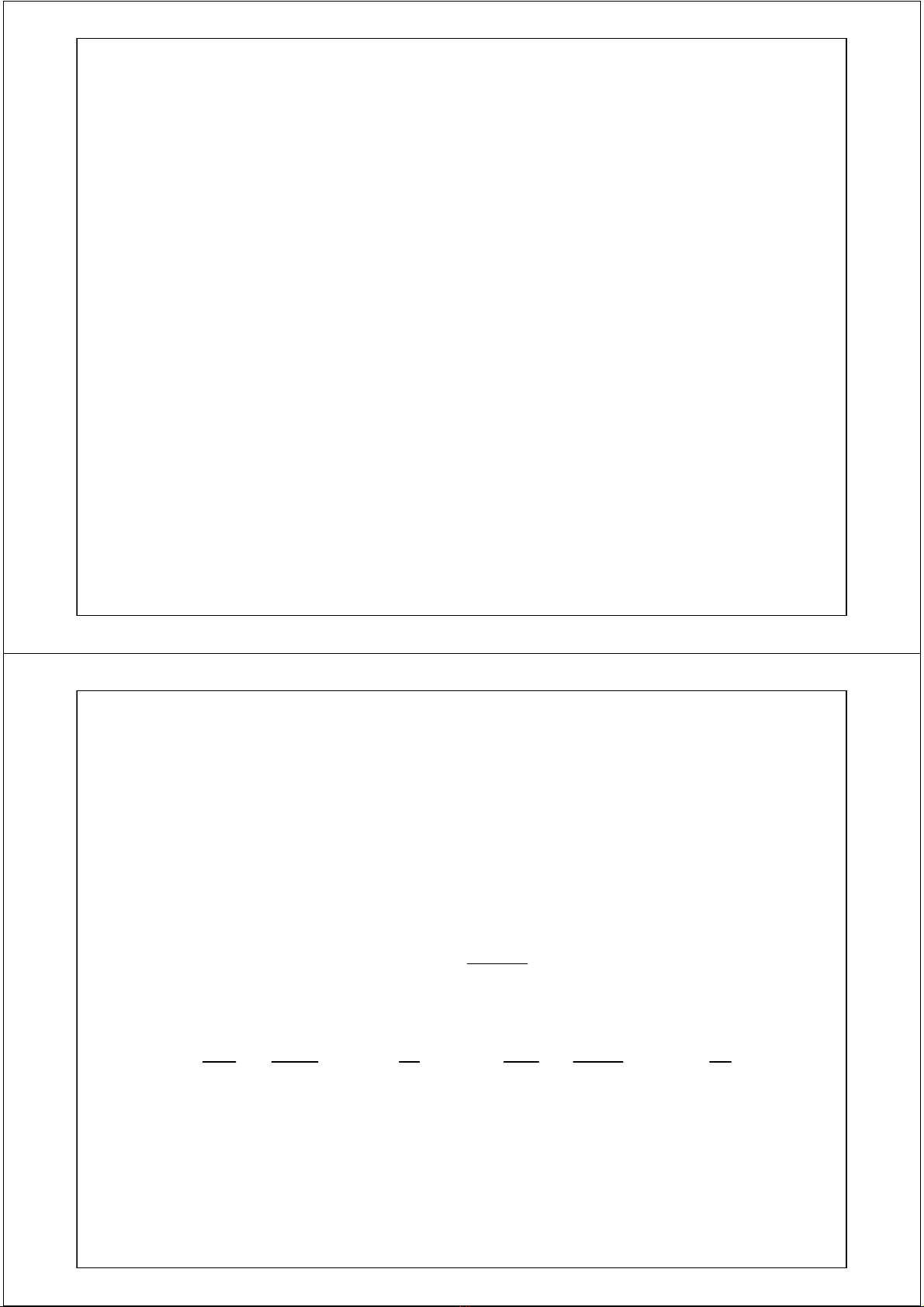
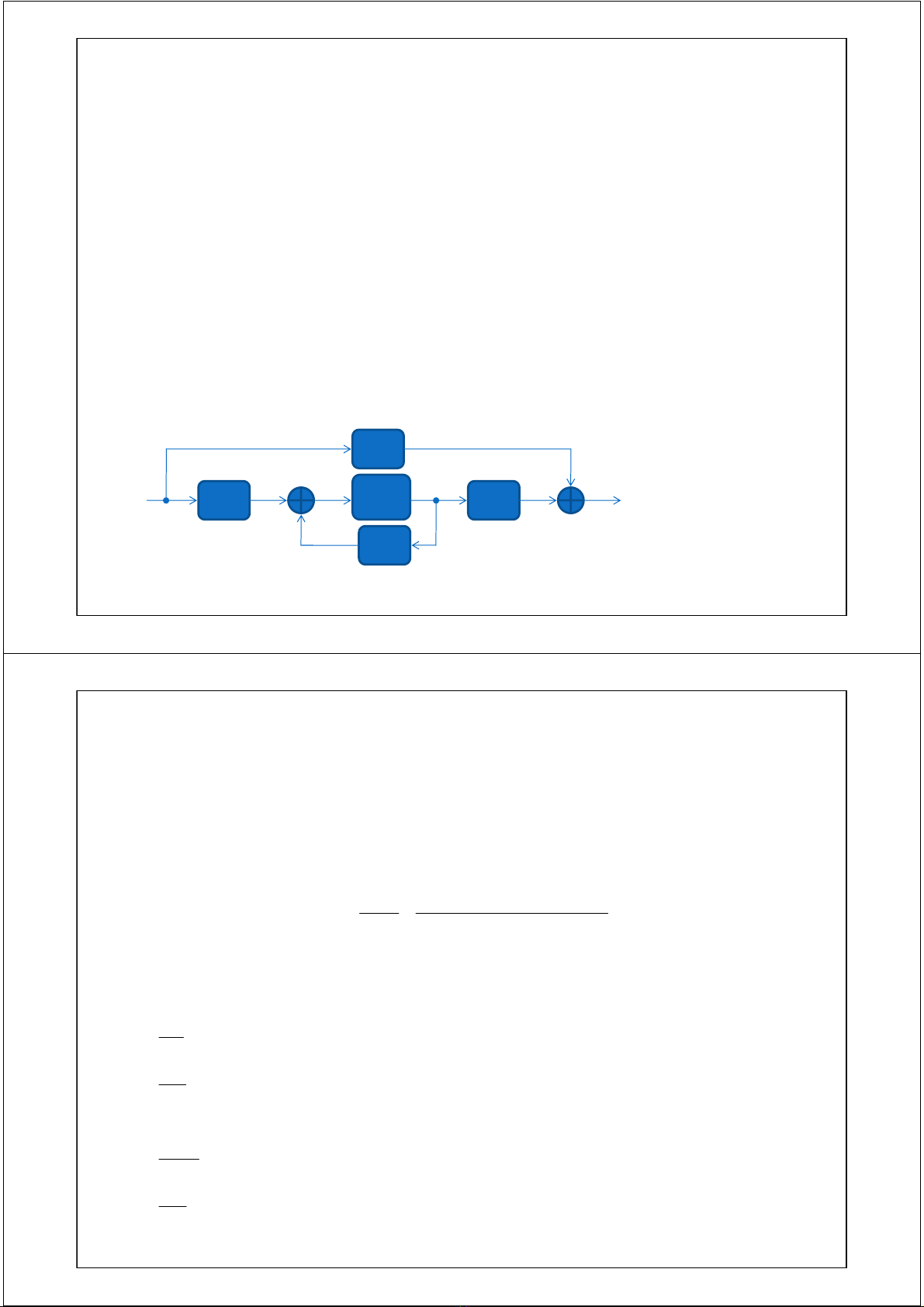
•Hệphương trình không gian trạng thái
x, dx/dt là các vector các biếntrạng thái nchiều, u là vector tín hiệuvàorchiều, ylà
vector tín hiệuram chiều
12/31/2009 9VũAnh Đào - PTIT
xAxBu
yCxDu
=+
⎧
⎨=+
⎩
11 12 1 11 12 1
21 22 2 21 22 2
12 12
... ...
... ...
,
... ... ... ... ... ... ... ...
... ...
nr
nr
nn nn nn nr
aa a bb b
aa a bb b
AB
aa a bb b
⎡⎤⎡⎤
⎢⎥⎢⎥
⎢⎥⎢⎥
==
⎢⎥⎢⎥
⎢⎥⎢⎥
⎣⎦⎣⎦
11 12 1 11 12 1
21 22 2 21 22 2
12 1 2
... ...
... ...
,
... ... ... ... ... ... ... ...
... ...
nr
nr
m m mn m m mr
cc c dd d
cc c dd d
CD
cc c dd d
⎡⎤⎡ ⎤
⎢⎥⎢ ⎥
⎢⎥⎢ ⎥
==
⎢⎥⎢ ⎥
⎢⎥⎢ ⎥
⎣⎦⎣ ⎦
B
()
t
od
τ
∫C
A
D
+
+
+
+
(
)
x
t
(
)
xt
(
)
yt
(
)
ut Hình 1.3 Sơđồcấutrúc
trạng thái hệliên tục
Chương 1. Mô tảtoán họchệthống ĐKTĐ...
•Chuyểntừhàm truyềnđạt sang hệphương trình trạng thái:
–Nếuhệthống có hàm truyềnđạtdạng:
–Đặt: Ta có hệPTTT:
12/31/2009 VũAnh Đào - PTIT 10
() ()
()
1
11
...
nn nn
Yp K
Wp Up pAp ApA
−−
==
++++
1
1211
2321
111
1
...
nnn
nn
yx
dx xAx
dt
dx xAx
dt
dx xAx
dt
dx Ku A x
dt
−−
=
⎧
⎪
⎪=−
⎪
⎪=−
⎪
⎪
⎨
⎪
⎪=−
⎪
⎪
⎪=−
⎪
⎩
11
22
11
0 1 ... 0 0
0 0 ... 0 0
... ... ... ... ... ... ...
nnn n
xx
xx
u
xAA Ax
K
−
⎡⎤⎡ ⎤⎡⎤⎡⎤
⎢⎥⎢ ⎥⎢⎥⎢⎥
⎢⎥⎢ ⎥⎢⎥⎢⎥
=+
⎢⎥⎢ ⎥⎢⎥⎢⎥
⎢⎥⎢ ⎥⎢⎥⎢⎥
−− − ⎣⎦
⎣⎦⎣ ⎦⎣⎦
()
[]
1
2
10...0...
n
x
x
yt
x
⎡⎤
⎢⎥
⎢⎥
=⎢⎥
⎢⎥
⎣⎦
xAxBu
yCxDu
=+
⎧
⎨=+
⎩
![Bài giảng Lý thuyết điều khiển TS. Nguyễn Thu Hà [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong02/135x160/241747304992.jpg)




















![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)

