1
Robot công nghi pệ
Handout for mechatronics class 2011
©
Gi ng viên: Nh Quý Thả ữ ơ
Tr ng đi h c Công Nghi p Hà N iườ ạ ọ ệ ộ
Khoa c khí – B môn C đi n tơ ộ ơ ệ ử
Phone: 04.37655121(Ext 324) Mobile: 0947593636
Email: nhuquytho@haui.edu.vn
Homepage: www.haui.edu.vn
2
Ch ng III Đng l c h c tay máyươ ộ ự ọ
Gi i quy t bài toán đng l c h c tay máy: Ph ng pháp ả ế ộ ự ọ ươ
Lagrange và ph ng pháp Newton-Eulerươ

Đng l c h c tay máy nghiên c u m i quan h gi a l c, ộ ự ọ ứ ố ệ ữ ự
mômen, năng l ng… v i các thông s chuy n đng c a ượ ớ ố ể ộ ủ
nó. Nghiên c u đng l c h c tay máy nh m các m c đích ứ ộ ự ọ ằ ụ
sau:
Mô ph ng ho t đng c a tay máy, đ kh o sát, th ỏ ạ ộ ủ ể ả ử
nghi m quá trình làm vi c c a nó mà không ph i dùng ệ ệ ủ ả
tay máy th t.ậ
Phân tích tính toán k t c u c a tay máy.ế ấ ủ
Phân tích thi t k h th ng đi u khi n c a tay máy.ế ế ệ ố ề ể ủ

•3.1. Ph ng pháp Lagrange:ươ
•3.1.1. C s toán h c:ơ ở ọ
• Ph ng pháp Lagrange d a trên m i quan h gi a t ng năng ươ ự ố ệ ữ ổ
l ng c a h th ng v i l c t ng quát trong m t h t a đ t ng ượ ủ ệ ố ớ ự ổ ộ ệ ọ ộ ổ
quát.
• Gi s xác đnh m t t p h p các bi n v i i = 1…n, v i t ả ử ị ộ ậ ợ ế ớ ớ ư
cách là các thông s mô t v trí các khâu c a m t tay máy có n b c ố ả ị ủ ộ ậ
t do, hàm lagrange c a c h là hàm s t ng quát c a các bi n nói ự ủ ơ ệ ố ổ ủ ế
trên:
•Trong đó T và U t ng ng là đng năng và th năng c a h th ng.ươ ứ ộ ế ủ ệ ố
• Công th c Lagrange đc vi t nh sau:ứ ượ ế ư
L = T – U
i
i
ii
LL
dt
d
'
v i i = 1…n ớ
i
i
Trong đó là l c t ng quát liên k t v i các t a đ t ng quát ự ổ ế ớ ọ ộ ổ
.
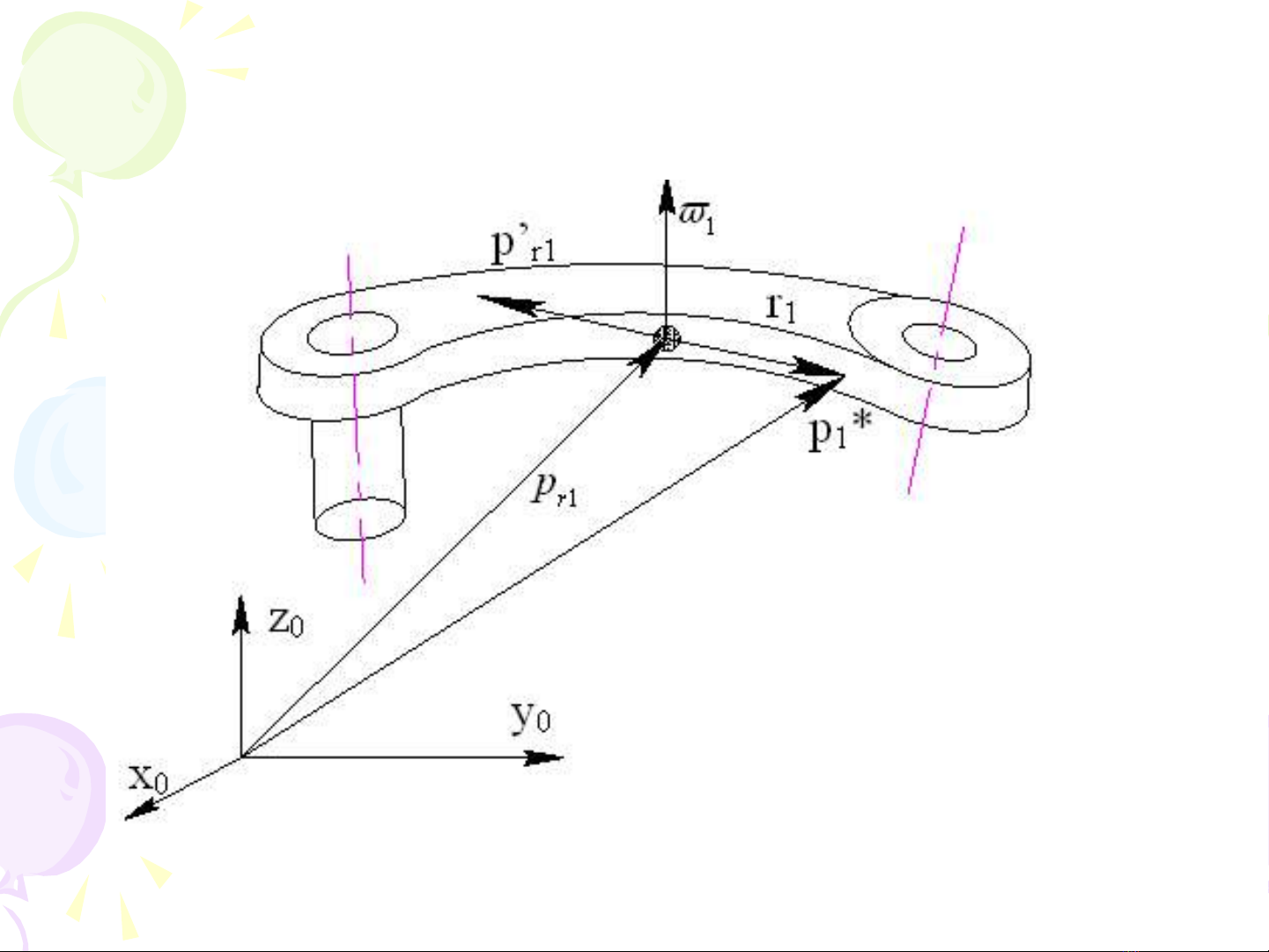
3.1.2. Tính đng năng:ộ
S đ tính đng năng chuy n đngơ ồ ộ ể ộ