BÀI TẬP ĐIỀU KIỆN
Môn: Cơ sở điều khiển tự động
(Sinh viên chọn 2 câu lý thuyết và 2 câu bài tập để làm)
CÂU HỎI LÝ THUYẾT
1. Trình bày đặc tính thời gian của hệ thống điều khiển tuyến tính liên tục.
2. Trình bày đặc tính động của hệ thống điều khiển tuyến tính liên tục?
3. Khâu quán tính bậc 1: nêu cách biểu diễn, tính chất và ứng dụng?
4. Khâu tích phân: nêu cách biểu diễn, tính chất và ứng dụng.
5. Khâu vi phân: nêu cách biểu diễn, tính chất và ứng dụng.
6. Khâu bậc 2: nêu cách biểu diễn, tính chất và ứng dụng.
7. Trình bày tiêu chuẩn Routh về xét tính ổn định của hệ thống điều khiển tuyến tính liên
tục?
8. Trình bày tiêu chuẩn Mikhailov về xét tính ổn định của hệ thống điều khiển tuyến tính
liên tục?
9. Hãy mô tả biến trạng thái thời gian rời rạc? Sơ đồ cấu trúc của hệ thống?
10. Trình bày các quy luật điều khiển P, PI, PD, PID, nêu ưu nhược điểm và ứng dụng.
CÂU HỎI BÀI TẬP
1. Một hệ thống điều khiển tự động có hàm truyền đạt hở:
()
(
)
()
()
2
h
13
kTp 1
Wp
p
Tp 1 Tp 1
+
=
+
+
Trong đó là hệ số phẩm chất của hệ;
k
(
)
(
)
13
T0,3s;T0,05s
=
= (là các hằng số thời gian
của khâu khuếch đại và của đối tượng); là hằng số thời gian của khâu hiệu chỉnh.
2
T
Xác định theo để hệ kín ổn định.
2
Tk
2. Cho hàm truyền đạt hở của hệ thống ĐKTĐ:
()
=
+
+
h2
4
Wp
T
pp
1
a/ Khi T= 2, Hệ thống hở có ổn định không?
b/ Tính sai số xác lập khi u(t) = 1(t) và khi T=2.
c/ Xét tính ổn định của hệ thống khi hệ thống có khâu hồi tiếp âm 1/p.
3. Cho hàm truyền đạt hở của hệ thống ĐKTĐ:
()
=
+
+
h2
k
Wp
pp
1
a/ Tính sai số xác lập khi u(t) = t.
b/ Với k= 2 hệ thống hở có ổn định không? k = ? hệ thống hở ổn định.
c/ Xét tính ổn định của hệ thống kín tương đương khi hệ thống hở mắc nối tiếp
khâu 1/p.
4. Cho hệ thống được mô tả bởi phương trình trạng thái như sau:

•
⎧
⎪=+
⎨=
⎪
⎩
XA.XBu(t)
YC.X
Trong đó ;
⎡⎤
=⎢
−
⎣⎦
0.5 1,5
A23
⎥
⎡
⎤
=
⎢
⎥
⎣
⎦
1
B0;
[
]
C1 0
=
a/ Hệ thống trên có quan sát được hay không.
b/ Hãy chuyển hệ thống trên sang hệ xung - số tương đương với thời gian cắt mẫu T =
0.25s.
c/ Vẽ sơ đồ tổng quát hệ thống xung - số đó.
5. Cho hệ thống được mô tả bởi phương trình trạng thái như sau:
•
⎧
⎪=+
⎨=
⎪
⎩
XA.XBu(t)
YC.X
Trong đó A =
⎡
⎤
⎢
⎥
−
⎣
⎦
0.5 3
21
; B =
−
⎡
⎤
⎢
⎥
⎣
⎦
1
0; C =
[]
;
10
a/ Hệ thống trên có điều khiển được hay không?
b/ Hãy chuyển hệ thống trên sang hệ xung số tương đương với thời gian cắt mẫu T = 0.3s.
c/ Vẽ sơ đồ hệ thống xung - số đó.
6. Cho hệ thống được mô tả bởi phương trình trạng thái như sau:
•
⎧
⎪=+
⎨=
⎪
⎩
XA.XBu(t)
YC.X
Trong đó A =
⎡
⎤
⎢
⎥
−
⎣
⎦
0.5 3k
21
; B =
−
⎡
⎤
⎢
⎥
⎣
⎦
1
0; C =
[]
;
10
a/ Xét tính điều khiển được của hệ thống khi k=3. Với k bằng bao nhiêu hệ thống không
điều khiển được?
b/ Hãy chuyển hệ thống trên sang hệ xung số tương đương với thời gian cắt mẫu T =
0.3(s) vẫn với k=3.
c/ Vẽ sơ đồ hệ thống xung - số đó.
7. Cho hệ thống được mô tả bởi phương trình trạng thái như sau:
•
⎧
⎪=+
⎨=
⎪
⎩
XA.XBu(t)
YC.X
Trong đó A =
⎡
⎤
⎢
⎥
−
⎣
⎦
0.5 3
2k
; B =
−
⎡
⎤
⎢
⎥
⎣
⎦
1
0; C =
[
]
10
;
a/ Xét tính điều khiển được của hệ thống khi k=2. Với k bằng bao nhiêu hệ thống không
điều khiển được?
b/ Hãy chuyển hệ thống trên sang hệ xung số tương đương với thời gian cắt mẫu T =
0.3(s) vẫn với k=2.
c/ Vẽ sơ đồ hệ thống xung - số đó.
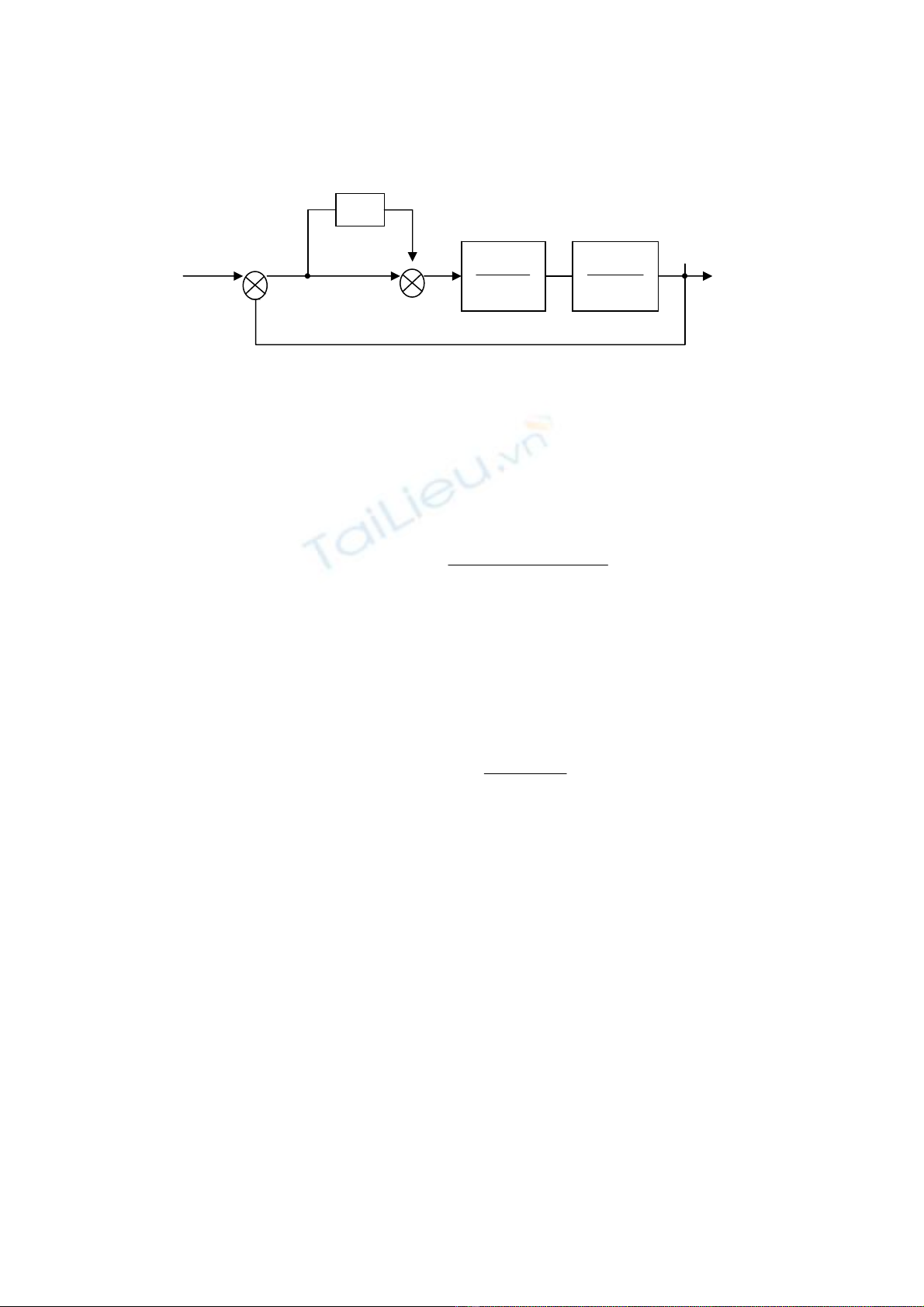
8. Sơ đồ cấu trúc bộ ổn định tĩnh vật bay có dạng:
pτ
1
11
k
Tp
+
2
21
k
Tp
+
+
v
θ r
θ
-
với hệ số truyền và hằng số thời gian
12
2, 4kk==
(
)
(
)
12
1, 5 , 0, 66TsT s
=
=
a/ Xét tính ổn định của hệ khi không có khâu hiệu chỉnh
(
)
Wp .
p=τ
b/ Tính sai số xác lập của hệ khi đầu vào là hàm 1(t).
c/ Tìm τ để hệ nằm trên biên giới ổn định
9. Hàm truyền hệ hở của một hệ thống có dạng:
()
()
22 21
H
k
Wp pT p Tp
=
+
ξ+
với hệ số khuếch đại ; hằng số thời gian
50K=
(
)
0,02Ts
=
a/ Tính hệ số cản dịu để cho hệ có thể ổn định?
ξ
b/ Điều kiện để hệ thống nằm trên biên giới ổn định?
10. Cho hệ thống có hàm truyền đạt hở:
()
32
10 4
85
h
p
Wp pp
+
=+
a/ Cho biết hệ hở gồm những khâu cơ bản nào?
b/ Vẽ sơ đồ cấu trúc, viết hàm truyền đạt và xét ổn định của hệ kín?
c/ Tính sai số tĩnh của hệ thống khi đầu vào là hàm 1(t)?
PHÒNG ĐÀO TẠO ĐẠI HỌC TỪ XA
![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)


![Bài tập môn Điều khiển nâng cao [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140213/letankiep1991/135x160/7671392284043.jpg)

![Bài tập lý thuyết điều khiển hiện đại [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130417/le_xuan_trung/135x160/1419631_1510.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)