
Huỳnh Chí Công-07703151 ðHðT3A
- 1 -
Bài Tập Lý Thuyết ðiều Khiển Hiện ðại
ðỀ BÀI: Số thứ tự : 11
1. Chuyển mô hình của ñối tượng ñiều khiển về dạng không gian trạng
thái chuẩn.
2. Kiểm tra sự ñiều khiển ñược và sự quan sát ñược của hệ ?
3. Phân tích ñối tượng ñiều khiển: tính các ñiểm cực, vẽ ñường ñặc tuyến,
xác ñịnh ñộ vọt và thời gian ổn ñịnh của hệ.
4. Giải bài toán ốn ñịnh hệ ñiều khiển phương pháp phân bố ñiểm cực với
các ñiểm cực mong muốn như sau:
• Nếu ñiểm cực nào có phần thực nhỏ hơn -10 (tức
Re( ) 10
s
< −
) thì
giữ nguyên.
• Nếu ñiểm cực nào có phần thực lớn hơn -10 (
Re( ) 10
s
> −
) thì dịch
chuyển ñiểm cực về vị trí
1,2
10 10
s j
= − ±
5. Giải bài toán ổn ñịnh hệ ñiều khiển phương pháp LQR với chỉ tiêu
chất lượng là:
( )
0
( , )
T T
J x u x Qx u Ru dt
∞
= +
∫
,
, 1
Q I R
= =
Vẽ ñồ thị ñáp ứng của hệ khi có bộ ñiều khiển hồi tiếp trạng thái và so sánh
với ñáp ứng của hệ lúc ban ñầu.
6. Thiết kế bộ quan sát toàn cấp (tính ma trận và phương trình trạng thái
bộ quan sát) .
7. Thực hiện bộ quan sát ñiều khiển (bộ ñiều khiển dựa trên bộ quan sát
trạng thái)ðTðK có hàm truyền là:
1 2
( ) ( ) ( )
x x
W s W s W s
= ⋅
Hàm truyền ðTðK1
1
( )
W s
Hàm truyền ðTðK2
2
( )
W s
400
(0.0143 1)
s s
+
4
(0.005 1)
s
+

Huỳnh Chí Công-07703151 ðHðT3A
- 2 -
BÀI LÀM:
1) Chuyển mô hình của ñối tượng ñiều khiển về dạng không gian trạng
thái chuẩn :
sssxsss
sWsWsW
xx
++
=
++
==
−235
21
0193.01015.7
1600
)1005.0(
4
)10143.0(
400
)().()(
0)(1038.22)(13986)(270)(
0)(.1600)()(0193.0)(1015.7
)(.1600)().0193.01015.7(
0193.01015.7
1600
)(
)(
)(
623
235
235
235
=−++⇔
=−++⇔
=++⇔
++
==⇔
−
−
−
sUxssYsYssYs
sUssYsYssYsx
sUsYsssx
sssxsU
sY
sW
ðặt :
. Suy ra :
Từ trên, ta suy
ra:
ðáp ứng của hệ thống là :
Vậy mô hình của ñối tượng ñiều khiển về dạng không gian trạng
thái chuẩn,có dạng :
!
"
#
"
$
%
&
%
&

Huỳnh Chí Công-07703151 ðHðT3A
- 3 -
2) Kiểm tra sự ñiều khiển ñược và sự quan sát ñược của hệ :
Ta có :A = %
&; B = %
&; C =
CA =
;
'(
A.B = %
)
*
&; A
2
B = %
)
*
&
Suy ra : +
,
= [B AB A
2
B] = %
)
*
)
*
&
+
-
=%'
'(
'(
&%
&
Và ta suy ra ñược: ./01+
-
2
/01+
,
2. Do ñó hệ hoàn toàn có
thể ñiều khiển ñược(/01+
,
2) và quan sát ñược(/01+
-
2).
3) Phân tích ñối tượng ñiều khiển: tính các ñiểm cực, vẽ ñường ñặc tuyến,
xác ñịnh ñộ vọt và thời gian ổn ñịnh của hệ :
ðối tượng ñiều khiển là
sssxsU
sY
sW ++
==
−235
0193.01015.7
1600
)(
)(
)(
Suy ra ñối tượng ñiều khiển không có zero, có các cực là nghiệm của pt
143
10
;200;000193.01015.7
4
321
235
−
=−==⇔=++
−
ssssssx
Các ñường ñặc tuyến :

Huỳnh Chí Công-07703151 ðHðT3A
- 4 -
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09
0
200
400
600
800
1000
1200
1400
1600
Impulse Response
Time (sec)
Amplitude
• Biểu ñồ Bode:
• ðáp ứng xung:
-100
-50
0
50
100
Magnitude (dB)
10
0
10
1
10
2
10
3
10
4
-270
-225
-180
-135
-90
Phase (deg)
Bode Diagram
Frequency (rad/sec)

Huỳnh Chí Công-07703151 ðHðT3A
- 5 -
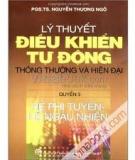
• ðáp ứng nấc (step response):
Hệ thống ở biên giới ổn ñịnh hay nói cách khác hệ không ổn ñịnh hoàn
toàn,và dựa vào các loại ñáp ứng, ta suy ra không tính ñược thời gian xác
lập của hệ (dựa vào ñáp ứng nấc). Do ñó, không tính ñược ñộ vọt lố.
4)
Giải bài toán ốn ñịnh hệ ñiều khiển phương pháp phân bố ñiểm cực với
các ñiểm cực mong muốn như sau:
• Nếu ñiểm cực nào có phần thực nhỏ hơn -10 (tức
Re( ) 10
s
< −
) thì
giữ nguyên.
• Nếu ñiểm cực nào có phần thực lớn hơn -10 (
Re( ) 10
s
> −
) thì dịch
chuyển ñiểm cực về vị trí
1,2
10 10
s j
= − ±
!
"
#
"
$
%
&
%
&
0 500 1000 1500
0
0.5
1
1.5
2
2.5 x 10
6
Step Response
Time (sec)
Amplitude
![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)


![Bài tập môn Điều khiển nâng cao [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140213/letankiep1991/135x160/7671392284043.jpg)





















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)