Bµi tËp lín: LT§KT§
Sinh viªn : Tạ Văn Tiến_
DHDI7TH
1
bµi tËp lín lý thuyÕt ®iÒu khiÓn tù ®éng
§Ò bµi :
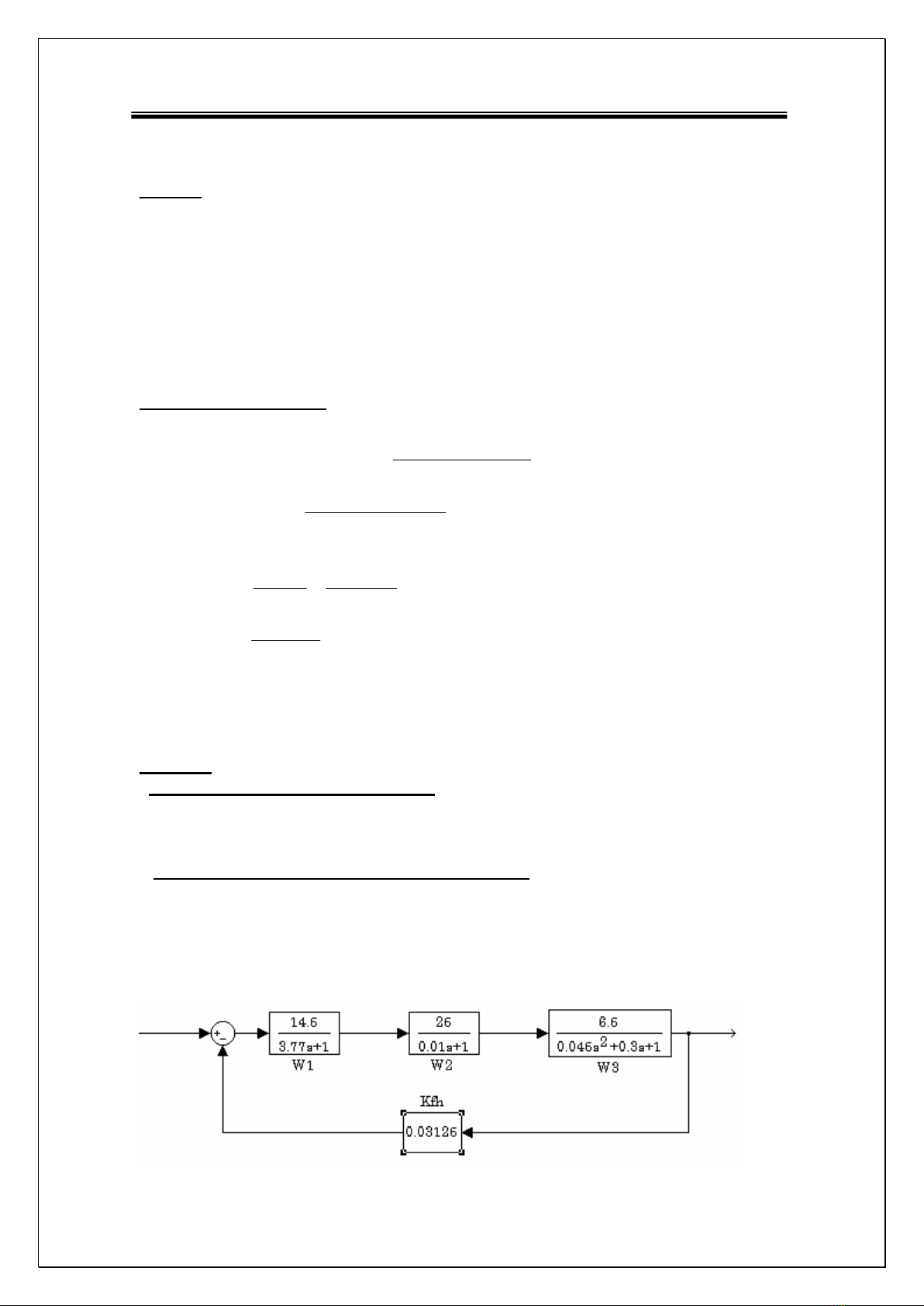
Cho hÖ thèng ®iÒu khiÓn tèc ®é ®éng c¬ nh- h×nh vÏ :(h×nh 1)
Yªu cÇu :
1. X©y dùng s¬ ®å khèi cÊu tróc vµ hµm truyÒn ®¹t c¸c phÇn tö
2. XÐt æn ®Þnh hÖ thèng vµ tÝnh qu¸ tr×nh qu¸ ®é (b»ng ph- ¬ng ph¸p sè Tustin) khi bá
qua kh©u PID vµ ng¾t bá kh©u W4(p) .
3. Khi cã bé PID , cã W4(p) xÐt æn ®Þnh hÖ thèng b»ng Matlab, cô thÓ :
a, c¾t bá W4(p) t×m c¸c tham sè cña bé PID ®Ó smax <=15% .
b,bá PID , gi÷ l¹i W4(p) t×m Td ®Ó chÊt l- îng hÖ thèng t- ¬ng ®èi tèt .
c, cã PID , cã W4(p) x¸c ®Þnh c¸c tham sè ®Ó smax <=10% .
- nhãm 13 cã c¸c sè liÖu :
R =10 K , R1 =145 K , C1 = 26mF
Hµm truyÒn ®¹t ®éng c¬: 1.. 2++
=pTpTT
k
W
mem
m
dc víi km = 6,5 ; Tm = 0,3 sec ; Te =
0,15 sec ta cã : 13,0045,0
5,6
2++
=pp
Wdc =W3(p)
- Kh©u K§1 cã hµm truyÒn nh- sau :
W1(p) = 177,3
5,14
1
1
1
+
=
+ppT
K
- 101,0
25
)(
2+
=p
pW
Bµi lµm
1. X©y dùng s¬ ®å cÊu tróc hÖ thèng :
- s¬ ®å cÊu tróc hÖ thèng ®- îc vÏ nh- h×nh sè 2 trong ®ã c¸c hµm truyÒn ®¹t ®·
®- îc tÝnh vµ hÖ sè ph¶n håi Kf = KpaKft =0,125*0,25 = 0.03125
+ nguyªn lý lµm viÖc cña hÖ thèng :
2.XÐt æn ®Þnh hÖ thèng vµ tÝnh qu¸ tr×nh qu¸ ®é :
- khi bá kh©u PID vµ ng¾t bá W4(p) ta cã s¬ ®å cÊu tróc nh- sau :
(H×nh vÏ sè 3)
Bµi tËp lín: LT§KT§
Sinh viªn : Tạ Văn Tiến_
DHDI7TH
2
HÖ thèng gåm hai kh©u qu¸n tÝnh vµ mét kh©u dao ®éng m¹ch ph¶n håi cã hÖ sè b»ng
0.03125 .
- xÐt kh©u qu¸n tÝnh : W1(p)= )(
)(
177,3
5,14 1
pE
pY
p=
+
thÕ p =
1
12
+
-
Z
Z
T
vµo ta cã : )(.)(..)(.)(. 11111 ZEBZEZBZYAZYZ ++=
trong ®ã :
T
T
B
T
T
A
+
=
+
-
=
54,7
5,14
54,7
54,7
1
1
Ph- ¬ng tr×nh sai ph©n cã d¹ng :
][]1[][]1[ 11111 kEBkEBkYAkY +++=+
- t- ¬ng tù xÐt víi kh©u qu¸n tÝnh : 101.0
25
)(
2+
=p
pW = )(
)(
1
2
pY
pY thay p =
1
12
+
-
Z
Z
T
vµo
ta cã:
)(.)(..)(.)(. 1112222 ZYBZYZBZYAZYZ ++= (1)
trong ®ã :
T
T
B
T
T
A
+
=
+
-
=
02
.
0
.25
02.0
02.0
2
2
Ph- ¬ng tr×nh sai ph©n cã d¹ng :
][]1[][]1[ 1212222 kYBkYBkYAkY +++=+ (2)
§èi víi kh©u dao ®éng : )(
)(
13.0045.0
5.6
)(
2
2
3pY
pY
pp
pW =
++
= ta cã :
Thay p =
1
12
+
-
Z
Z
T
vµo :
( )
33
2
3
22
3
2
3
1.2.5.6
)(
1
1
1
.
2
.3.0)
1
1
.
2
(045.0
5.6
)(
CZBZA
ZZT
ZW
Z
Z
TZ
Z
T
ZW
++
++
=Þ
+
+
-
+
+
-
=
Trong ®ã :
TTC
TB
TTA
6.018.0
36.02
6.018.0
2
3
2
3
2
3
-+=
-=
++=
Ph- ¬ng tr×nh ®¹i sè :
)()(.2)([5.6)()().(. 222
22
33
2
3ZYZZYZYZTZYCZZYBZZYA ++=++
Ph- ¬ng tr×nh sai ph©n t- ¬ng ®- ¬ng lµ :
Bµi tËp lín: LT§KT§
Sinh viªn : Tạ Văn Tiến_
DHDI7TH
3
3222
2
33 /])[]1[.2]2[(5.6][]1[.(]2[ AkYkYkYTkYCkYBkY +++++-+-=+
VËy ph- ¬ng tr×nh sai ph©n m« t¶ hÖ thèng theo ph- ¬ng ph¸p sè Tustin lµ :
322233
1212222
11111
/]))1[][*2]1[(***5.6]1[*][*(]1[
][*]1[*][*]1[
][*]1[*][*]1[
]
[
*
03125
.
0
]
[
AkYkYkYTTkYCkYBkY
kYBkYBkYAkY
kEBkEBkYAkY
k
Y
U
k
E
-++++---=+
+++=+
+++=+
-
=
§Ó tÝnh qu¸ tr×nh qu¸ ®é cña hÖ thèng ta dïng Matlab ®Ó kiÓm tra xem hÖ thèng cã æn
®Þnh hay kh«ng :
nh- sau :
>> w1=tf([14.5],[3.77 1]);
Transfer function:
14.5
----------
3.77 s + 1
>> w2=tf([25],[.01 1])
Transfer function:
25
----------
0.01 s + 1
>> w3=tf([6.5],[0.04 .3 1])
Transfer function:
6.5
--------------------
0.045 s^2 + 0.3 s + 1
Transfer function:
2356,25
-----------------------------------------------------
Bµi tËp lín: LT§KT§
Sinh viªn : Tạ Văn Tiến_
DHDI7TH
4
0,001697s^4 + 0,1814 s^3 + 1,2161s^2 + 4,08 s + 1
>> k= 0.03125;
>> wk=feedback(wh,k)
Transfer function:
2356,25
-----------------------------------------------------------------------
0,01697s^4 + 0,1814 s^3 + 1,2167s^2 + 4,48s +51,78
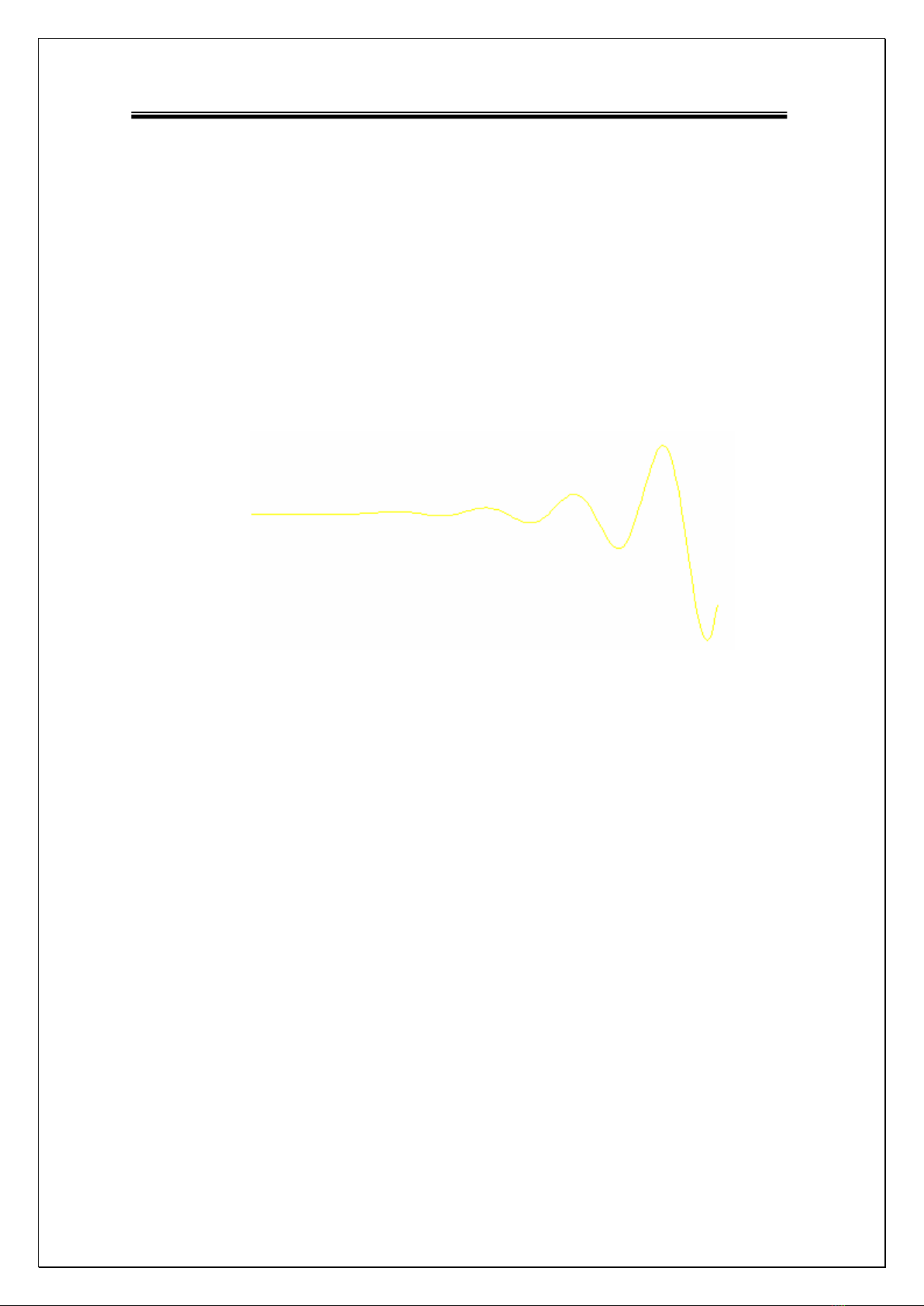
>> step(wk)
ta cã ®Æc tÝnh qu¸ ®é nh- sau :
tÝnh qu¸ tr×nh qu¸ ®é b»ng ph- ¬ng ph¸p TUSTIN:
#include<iostream.h>
#include<conio.h>
#include<graphics.h>
include<stdlib.h>
float T,a1a,a2,a3,b1,b2,b3,c3,u;
float y1[640] , y2[640] , y[640] , e[640] ;
int gt , gm , i , k;
void main()
{
co ut<< “\nTinh q u a trin h qua do he thong”;
cout<<”\nnhap buo c tinh T=”; cin >>T;
y[0] = 0; y[1]= 0; y1[0] = 0; y2[0] = 0;
for(k=0; k<=630; k++)
{
Bµi tËp lín: LT§KT§
Sinh viªn : Tạ Văn Tiến_
DHDI7TH
5
;/]))1[][*2]1[(***5.6]1[*][*(]1[
];[*]1[*][*]1[
];[*]1[*][*]1[
];
[
*
03125
.
0
]
[
322233
1212222
11111
AkYkYkYTTkYCkYBkY
kYBkYBkYAkY
kEBkEBkYAkY
k
Y
U
k
E
-++++---=+
+++=+
+++=+
-
=
co ut<< “\n\t\tk=%3d y=%6.2f “,k,y[k] ;
delay(1) ;
}
getch() ;
gd = DETECT;
initgrap h(&gd,&g m,”c:\\borlandc++\\bgi”) ;
setlinestyle(0,0,3) ;
setbkcolor(0) ; setcolor(4) ;
outtextxy(160,30,”P HUONG P HAP S O TUS TIN”) ;
outtextxy(150,40,”(He khong on dinh )”) ;
outtexexy(20,450,”0”) ;
setcolor(5) ;
rectangle(2,2,637,477) ;
setcolor(1) ;
for (i = i ; i<=10 ; i++)
{
line(64*i, 5, 64*i,15) ;
line(64*i + 32, 5, 64*i + 32, 10) ;
line(64*i, 475, 64*i, 464) ;
line(64*i + 32475, 64*i + 32 , 468) ;
line(5, 48*i, 10 , 48*i) ;
}
setcolor(2) ;
moveto(1,477) ;
for (k=0 ;k<= 630 ; k++)
{
lineto(k, 479 – (int)(10*y[k]/1.6)) ;
}
outtextxy(580, 470 – (int)(10*y[k]/1.6),”y(t)”) ;
outtextxy(455, 450 – (int)(10*y[k]/1.6),”Tin hieu ra”) ;
getch() ;
closegraph() ;
return(0) ;}
3. Khi cã bé PID vµ cã kh©u W4(p) :
a, khi bá kh©u W4(p) ta cã s¬ ®å khèi cña hÖ thèng nh- sau :
Khi m¾c nèi tiÕp bé PID
![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)


![Bài tập môn Điều khiển nâng cao [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140213/letankiep1991/135x160/7671392284043.jpg)

![Bài tập lý thuyết điều khiển hiện đại [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130417/le_xuan_trung/135x160/1419631_1510.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)