Bài t p l n nguyên lý máyậ ớ B môn: K thu t cộ ỹ ậ ơ
khí
M C L CỤ Ụ
Ph n 1:ầ T ng h p và phân tích đ ng h c c c u ph ng:ổ ợ ộ ọ ơ ấ ẳ
I. Tính b c t do- x p lo i c c u chính...........................ậ ự ế ạ ơ ấ 3
1.1. B c t do........................................................ ậ ự 3
1.2. X p lo i c c u...............................................ế ạ ơ ấ 3
II. T ng h p đ ng h c c c u chính................................ổ ợ ộ ọ ơ ấ 3
III. Phân tích đ ng h c c c u chính................................ộ ọ ơ ấ 4
3.1. Yêu c u............................................................ầ4
3.2. H a đ v trí......................................................ọ ồ ị 4
3.3. Đ th l c c n...................................................ồ ị ự ả 4
3.4. H a đ v n t c..................................................ọ ồ ậ ố 5
3.5. H a đ gia t c...................................................ọ ồ ố 6
Ph n 2:ầ Phân tích áp l c kh p đ ng và tính Mự ớ ộ cb:
4.1. Yêu c u............................................................13ầ
4.2. Phân tích áp l c kh p đ ng.............................13ự ớ ộ
4.3. Tính Mcb ..........................................................14
Tr ng Đ i h c k thu t công nghi pườ ạ ọ ỹ ậ ệ SV: Phan Th Ph ng Th o- L p:ị ươ ả ớ
43A
1

Bài t p l n nguyên lý máyậ ớ B môn: K thu t cộ ỹ ậ ơ
khí
BÀI T P L N NGUYÊN LÝ MÁYẬ Ớ
__MÁY BÀO LO I 3- PH NG ÁN 3__Ạ ƯƠ
L I NÓI Đ UỜ Ầ
Đ t n c ta đang trên con đ ng công nghi p hóa, hi n đ i hóa đ t n cấ ướ ườ ệ ệ ạ ấ ướ
theo ch nghĩa xã h i. Trong đó ngành công nghi p đóng m t vai trò h t s củ ộ ệ ộ ế ứ
quan tr ng. Các h th ng máy móc ngày càng tr nên ph bi n, hi n đ i và d nọ ệ ố ở ổ ế ệ ạ ầ
d n thay th s c lao đ ng c a con ng i. Đ t o ra và làm ch các lo i máyầ ế ứ ộ ủ ườ ể ạ ủ ạ
móc nh th ngành c khí c n đ y m nh đào t o đ i ngũ cán b k thu t cóư ế ơ ầ ẩ ạ ạ ộ ộ ỹ ậ
trình đ chuyên môn cao đ ng th i ph i đáp ng đ c yêu c u c a công nghộ ồ ờ ả ứ ượ ầ ủ ệ
s n xu t tiên ti n.ả ấ ế
Nh m th c hi n m c tiêu đó, chúng em là sinh viên tr ng Đ i h c Kằ ự ệ ụ ườ ạ ọ ỹ
thu t Công nghi p Thái Nguyên nói riêng và nh ng sinh viên tr ng ĐHKT nóiậ ệ ữ ườ
chung luôn c g ng h c t p và rèn luy n đ sau khi ra tr ng v i nh ng ki nố ắ ọ ậ ệ ể ườ ớ ữ ế
th c đã đ c h c chúng em có th góp m t ph n s c l c, trí tu c a mình vàoứ ượ ọ ể ộ ầ ứ ự ệ ủ
công cu c đ i m i đ t n c.ộ ổ ớ ấ ướ
Môn h c nguyên lý máy là m t trong nh ng môn h c c s không thọ ộ ữ ọ ơ ở ể
thi u đ c đ i v i các ngành k thu t, vì th làm bài t p l n nguyên lý máy làế ượ ố ớ ỹ ậ ế ậ ớ
công vi c r t quan tr ng và c n thi t đ chúng em hi u sâu, hi u r ng nh ngệ ấ ọ ầ ế ể ể ể ộ ữ
ki n th c đã đ c h c c lý thuy t l n th c ti n, t o ti n đ cho nh ng mônế ứ ượ ọ ở ả ế ẫ ự ễ ạ ề ề ữ
h c sau này.ọ
Bài t p l n c a em đ c th y giáo, PGS.TS.Phan Quang Th giao cho làậ ớ ủ ượ ầ ế
MÁY BÀO LO I 3- ph ng án 3. V i nh ng ki n th c đã h c cùng v i s giúpẠ ươ ớ ữ ế ứ ọ ớ ự
đ t n tình c a các th y cô trong b môn, s đóng góp, trao đ i c a b n bè emỡ ậ ủ ầ ộ ự ổ ủ ạ
đã hoàn thành bài t p l n này. Nh ng do đây là l n đ u tiên làm bài t p l n nênậ ớ ư ầ ầ ậ ớ
không tránh kh i nh ng thi u sót. Em r t mong đ c s góp ý c a các th y côỏ ữ ế ấ ượ ự ủ ầ
đ bài t p l n c a em đ c hoàn thi n h n. Cu i cùng em xin chân thành c mể ậ ớ ủ ượ ệ ơ ố ả
n s giúp đ c a các th y cô giáo trong b môn K thu t c khí, đ c bi t làơ ự ỡ ủ ầ ộ ỹ ậ ơ ặ ệ
th y giáo Phan Quang Th .ầ ế
Sinh viên
Phan Th Ph ng Th oị ươ ả
Tr ng Đ i h c k thu t công nghi pườ ạ ọ ỹ ậ ệ SV: Phan Th Ph ng Th o- L p:ị ươ ả ớ
43A
2
Bài t p l n nguyên lý máyậ ớ B môn: K thu t cộ ỹ ậ ơ
khí
I. Tính b c t do- X p lo i c c u chính:ậ ự ế ạ ơ ấ
1.1. B c t do:ậ ự
Áp d ng công th c: W= 3n - (2P5+P4) + r + r’ - Sụ ứ
Trong c c u này:ơ ấ
n: S khâu đ ng, n=5ố ộ
P5: S kh p lo i 5, P5=7ố ớ ạ
P4: S kh p lo i 4, P4=0ố ớ ạ
r: S ràng bu c trùng, r=0ố ộ
r’: S ràng bu c th a, r’=0ố ộ ừ
S: S b c t do th a, S=0ố ậ ự ừ
⇒ W= 3.5 - 2.7 = 1
V y c c u có b c t do b ng 1.ậ ơ ấ ậ ự ằ
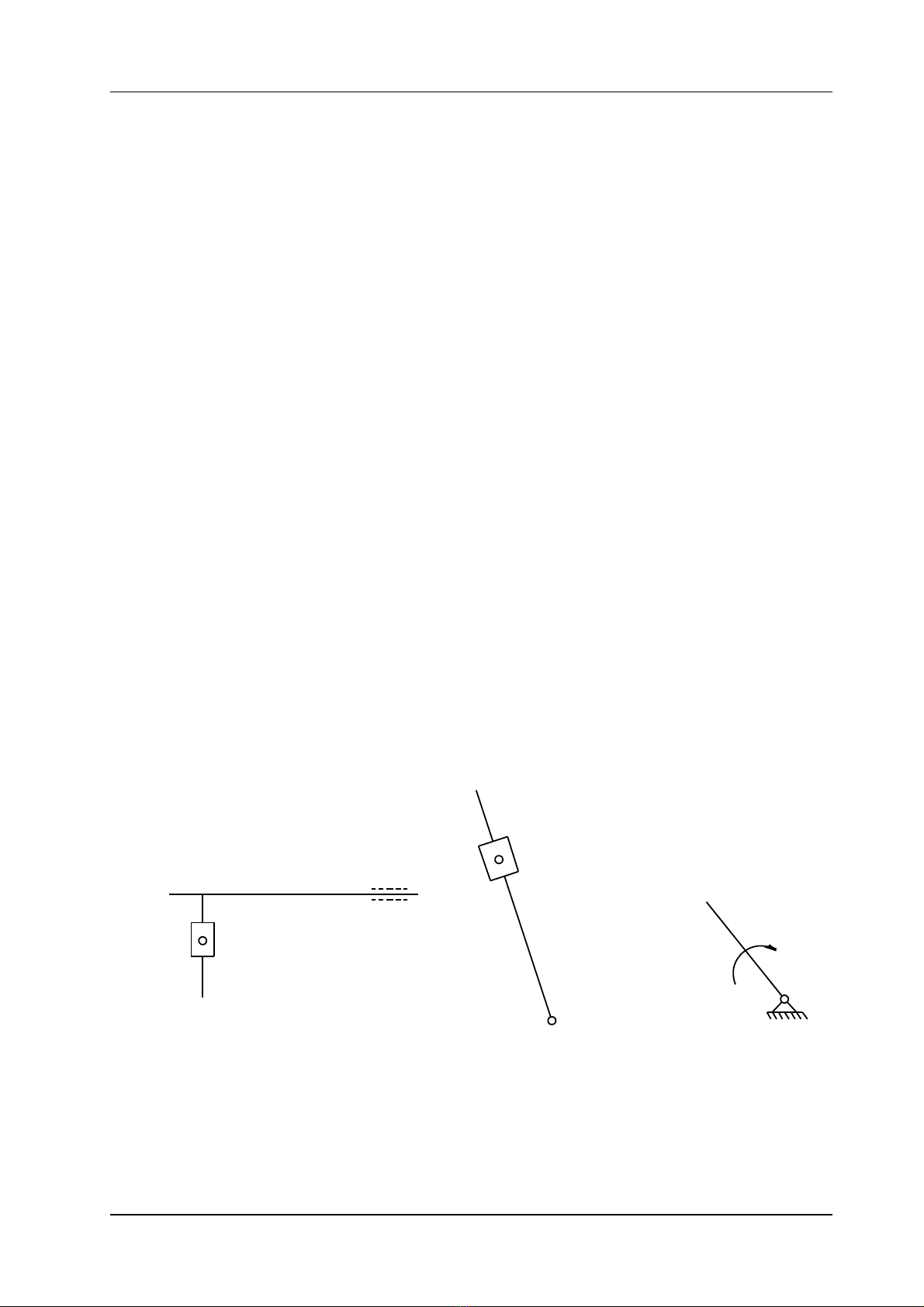
1.2. X p lo i c c u:ế ạ ơ ấ
Ch n khâu 1 làm khâu d n ta tách c c u thành hai nhóm atxua lo i 2:ọ ẫ ơ ấ ạ
(4,5) và (2,3) (Hình 1). Do đó c c u là c c u lo i 2.ơ ấ ơ ấ ạ
5
4
2
3
1
ω
1
Hình 1: Tách nhóm atxua và x p lo i c c u.ế ạ ơ ấ
II. T ng h p đ ng h c c c u chính:ổ ợ ộ ọ ơ ấ
2.1. Yêu c u:ầ
Tr ng Đ i h c k thu t công nghi pườ ạ ọ ỹ ậ ệ SV: Phan Th Ph ng Th o- L p:ị ươ ả ớ
43A
3
Bài t p l n nguyên lý máyậ ớ B môn: K thu t cộ ỹ ậ ơ
khí
Xác đ nh kích th c đ ng c a các khâu d a trên l c đ đ ng c a c c uị ướ ộ ủ ự ượ ồ ộ ủ ơ ấ
và d li u c a ph ng án 3.ữ ệ ủ ươ
2.2. Tính toán:
T công th c h s v nhanh: k= ừ ứ ệ ố ề
ψ
ψ
−
+
180
180
Ta có
82,38
155,1
155,1
180
1
1
180 =
+
−
=
+
−
=k
k
ψ
T Oừ2k Oẻ2x và O2x’ h p v i Oợ ớ 1O2 m t góc ộ
41,19
. T Oừ1O2 v đ ngẽ ườ
tròn ti p xúc v i Oế ớ 2x và O2x’ ⇒ hai v trí ch t c a c c u.ị ế ủ ơ ấ
Xét c c u t i v trí này:ơ ấ ạ ị
)(152,0)47,19sin(.46,0
2
sin.
11 mLRL AOAO ====
ψ
)(84,0
)41,19sin(.2
56,0
2
sin.2
2m
H
LBO ===
ψ
)(0456,0.3,0 1mLa AO ==
0,05H=0,05.560=28(mm)=0,028(m)
III. Phân tích đ ng h c c c u chính:ộ ọ ơ ấ
3.1. Yêu c u:ầ
T k t qu t ng h p đ ng h c c c u chính v h a đ v trí, h a đ v nừ ế ả ổ ợ ộ ọ ơ ấ ẽ ọ ồ ị ọ ồ ậ
t c, h a đ gia t c đ xác đ nh các đ c tr ng đ ng h c c a các khâu b d n.ố ọ ồ ố ể ị ặ ư ộ ọ ủ ị ẫ
3.2. H a đ v trí:ọ ồ ị
Ch n t l xích chi u dài µọ ỷ ệ ề L:
)/(0025,0
8,60
152,0
1
1
mmm
AO
L
AO
L
===
µ
AO
L1
là chi u dài th t c a khâu 1 (m)ề ậ ủ
O1A là chi u dài bi u di n c a khâu 1 (mm)ề ể ễ ủ
Xác đ nh đ dài bi u di n cho các khâu b d n:ị ộ ể ễ ị ẫ
)(184
0025,0
46,0
21
21 mm
L
OO
L
OO ===
µ
)(336
0025,0
84,0
2
2mm
L
BO
L
BO ===
µ
Tr ng Đ i h c k thu t công nghi pườ ạ ọ ỹ ậ ệ SV: Phan Th Ph ng Th o- L p:ị ươ ả ớ
43A
4
Bài t p l n nguyên lý máyậ ớ B môn: K thu t cộ ỹ ậ ơ
khí
)(224
0025,0
56,056,0 mmH
L
===
µ
)(24,18
0025,0
0456,00456,0 mma
L
===
µ
)(76
0025,0
19,019,0 mmb
L
===
µ
L y đi m Oấ ể 2 b t kỳ, l p h tr c xOấ ậ ệ ụ 2y. Trên O2y l y Oấ1O2 = 184(mm). T iạ
O1 v đ ng tròn bán kính Oẽ ườ 1A = 60,8(mm). T Oừ2 v hai ti p tuy n v i đ ngẽ ế ế ớ ườ
tròn v a v đ c ta xác đ nh đ c hai v trí biên (hai v trí ch t). T Oừ ẽ ượ ị ượ ị ị ế ừ 2 vẽ
đ ng tròn bán kính Oườ 2B=336(mm)
Ti n hành v h a đ v trí. Ch n Aế ẽ ọ ồ ị ọ 1 (v trí biên th nh t) t ng ng v iị ứ ấ ươ ứ ớ
v trí b t đ u c a φị ắ ầ ủ đ chia đ ng tròn (Oườ 1, O1A) thành 8 ph n b ng nhau ta đ cầ ằ ượ
8 v trí. Ba v trí đ c bi t: v trí biên th 2, hai v trí ng v i 0,05H. Đánh s thị ị ặ ệ ị ứ ị ứ ớ ố ứ
t các v trí theo chi u quay c a kim đ ng h .ự ị ề ủ ồ ồ
H a đ v trí đ c th hi n trên hình 2.ọ ồ ị ượ ể ệ
3.3. Đ th l c c n:ồ ị ự ả
Theo đ u bài ta có: Pầc=1400(N)
Ch n đo n bi u di n Pọ ạ ể ễ c:
)(40 mmL c
P=
V y ta có: ậ
)/(35
40
1400 mmN
L
P
c
c
P
c
P===
µ
Đ th l c c n v trên hình 2.ồ ị ự ả ẽ
Hành trình đi: Đo n 0,05H là khi đ u bào chu n b bào vào chi ti t, khi đóạ ầ ẩ ị ế
giá tr c a Pị ủ c ngay l p t c t 0 lên t i 1400N, giá tr này gi nguyên trong su tậ ứ ừ ớ ị ữ ố
quá trình bào.
Hành trình v : Khi ra kh i chi ti t giá tr c a Pề ỏ ế ị ủ c t 1400N l p t c gi mừ ậ ứ ả
ngay v 0 vì không còn l c c n Pề ự ả c n a, đ u bào d ch chuy n m t l ng t ngữ ầ ị ể ộ ượ ươ
ng v i v trí bào k ti p r i ch y không v v trí ban đ u.ứ ớ ị ế ế ồ ạ ề ị ầ
Tr ng Đ i h c k thu t công nghi pườ ạ ọ ỹ ậ ệ SV: Phan Th Ph ng Th o- L p:ị ươ ả ớ
43A
5















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)