
C«ng nghÖ tin häc vµ mét sè bµi to¸n c¬ kÜ thuËt
§ç Sanh1, §inh V¨n Phong1, NguyÔn Thanh Thuû2, NguyÔn NhËt Quang3, Phan M¹nh
DÇn1, §ç §¨ng Khoa1.
1) Bé m«n C¬ häc øng dông
2) Trung t©m tÝnh to¸n hiÖu n©ng cao
3) C«ng ty tin häc Hµi Hoµ
1. Më ®Çu
ViÖc sö dông c«ng nghÖ th«ng tin ®Ó gi¶i quyÕt c¸c bµi to¸n khoa häc kü thuËt lµ
xu huíng tÊt yÕu cña thêi ®¹i. Tuy nhiªn kh¸c víi nhiÒu n¨m tr−íc ®©y xu thÕ nµy ®ang
cã nhiÒu ®ßi hái cÊp thiÕt h¬n, c¶ tõ phÝa c«ng nghÖ th«ng tin còng nh− tõ phi¸ c¸c lÜnh
vùc kü thuËt sö dông c«ng nghÖ nµy . Nh÷ng ®ßi hái nµy yªu cÇu cã sù häp t¸c chÆt chÏ
h¬n n÷a gi÷a c¸c c¸n bé nghiªn cøu vµ ph¸t triÓn øng dông, ngay tõ khi bµi to¸n ®−îc
h×nh thµnh cho ®Õn c«ng ®o¹n cuèi cïng cña viÖc gi¶i quyÕt c¸c bµi to¸n.
Tõ phÝa c«ng nghÖ th«ng tin, sù ph¸t triÓn m¹nh mÏ cña c¸c kü thuËt míi ®Æc
biÖt lµ cña c¸c thiÕt bÞ phÇn cøng... ®· t¹o ra rÊt nhiÒu triÓn väng vÒ tèc ®é tÝnh to¸n, kh¶
n¨ng thÓ hiÖn vµ l−u tr÷ th«ng tin... Tuy nhiªn ë ViÖt nam ®iÒu nµy cã vÎ nh− míi chØ
dõng ë viÖc t¹o ra c¸c c«ng cô vµ ch−a t×m ra ®−îc c¸c bµi to¸n cô thÓ ®Ó sö dông c¸c
kh¶ n¨ng míi nµy.
Trong tham luËn d−íi ®©y chóng t«i xin ®Ò cËp vµ ph©n tÝch mét sè vÝ dô vÒ kh¶
n¨ng sö dông m¸y tÝnh tèc ®é cao trong viÖc gi¶i quyÕt c¸c bµi to¸n c¬ häc. Th«ng qua
viÖc m« t¶ c¸c yªu cÇu cña bµi to¸n c¬ trong viÖc x©y dùng ph−¬ng tr×nh chuyÓn ®éng,
gi¶i c¸c ph−¬ng tr×nh nµy ®Ó dÉn ®Õn viÖc m« pháng vµ ®iÒu khiÓn c¸c hÖ c¬ häc, c¸c
øng dông cña c«ng nghÖ cao trong lÜnh vùc c«ng tin häc nh−: xö lý song song, xö lý thêi
gian thùc, m« pháng, xö lý ®å ho¹ ®éng... sÏ ®−îc ®Ò cËp
2. Bµi to¸n thø nhÊt: bµi to¸n ng−îc ®éng häc cña robot
Ta xÐt bµi to¸n ng−îc ®iÒu khiÓn tèi −u ®éng häc cña r«bèt. Néi dung cña bµi
to¸n nh»m gi¶i quyÕt bµi to¸n ng−îc mét c¸ch tæng qu¸t dùa trªn ph−¬ng ph¸p tèi −u sè
vµ m« pháng ho¹t ®éng cña r« bèt trong kh«ng gian ®å ho¹ ba chiÒu.
2.1. §Æt bµi to¸n
Bµi to¸n nµy kh¶o s¸t bµi to¸n ng−îc ®iÒu khiÓn ®éng häc r« bèt. Bµi to¸n x¸c
®Þnh qui luËt thay ®æi theo thêi gian cña c¸c th«ng sè ®Þnh vÞ, th«ng sè vËn tèc cña tay
m¸y ®Ó nã n¾m b¾t ®−îc ®èi t−îng di ®éng.
§Ó t¨ng ®é ªm cho tay kÑp khi n¾m b¾t ®èi t−îng (tr¸nh va ch¹m) cÇn ph¶i
®iÒu khiÓn ®Ó vÞ trÝ cña tay kÑp kh«ng chØ b¾t ®−îc ®èi t−îng mµ vËn tèc vµ h−íng cña
tay kÑp còng cÇn trïng víi vËn tèc vµ h−ãng cña ®èi t−îng. Khi thùc hiÖn yªu cÇu nµy
lu«n cã sù sai lÖch vÒ vÞ trÝ vµ vËn tèc cña tay kÑp so víi vÞ trÝ vµ vËn tèc cña ®èi t−îng.
Bµi to¸n ®iÒu khiÓn tèi −u ®Æt ra lµ t×m c¸c th«ng sè ®iÒu khiÓn ®Ó tæng b×nh ph−¬ng c¸c
sai lÖch vÞ trÝ vµ vËn tèc bÐ nhÊt.

2.2 C¬ së lý thuyÕt.
2.2.1 C¸c c«ng thøc ®éng häc r«bèt x¸c ®Þnh vÞ trÝ vµ vËn tèc
Khi kh¶o s¸t robot ta th−êng ta sö dông ph−¬ng ph¸p ma trËn Denavit-
Hartenberg, trong ®ã sù liªn kÕt gi÷a c¸c kh©u cña robot ®−îc thÒ hiÖn qua ma trËn
truyÒn cã d¹ng sau:
cos( ) cos( ).sin( ) sin( ).sin( ) .cos( )
sin( ) cos( ).cos( ) -sin( ).cos( ) .sin( )
0sin() cos()
00 0 1
jjjjjkj
jjj jjkj
jjj
a
a
d
θαθαθ θ
θαθ αθ θ
αα
−
=
j
j-1
H (2.1)
trong ®ã c¸c tham sè cã ý nghÜa nh− sau:
• θj lµ gãc quay trôc xj-1 ®Õn trôc xj quanh trôc zj-1,
• dj lµ ®o¹n dÞch trôc xj-1 ®Õn trôc xj däc trôc zj-1,
• aj lµ ®o¹n dÞch trôc zj-1 ®Õn trôc zj däc trôc xj-1,
• αj lµ gãc quay trôc zj-1 ®Õn trôc zj quanh trôc xj-1.
Ma trËn truyÒn toµn thÓ cã d¹ng:
() () () ()
12 n
qq q
tay kep 1 2 n n
de 0 1 n-1 0
H = H .H ....H = H q
()
n
0
Hq cã d¹ng:
() ()
1
R
qpq
0 (2.2)
trong ®ã hÖ to¹ ®é ®Õ r« bèt kÝ hiÖu lµ 0, hÖ to¹ ®é tay kÑp r« bèt kÝ hiÖu lµ n, q lµ ma
trËn nx1 cña c¸c to¹ ®é suy réng, chóng lµ c¸c th«ng sè ®Þnh vÞ cña r«bèt. R(q) lµ ma
trËn 3x3 x¸c ®Þnh h−íng cña tay kÑp, p(q) lµ vect¬ 3x1 x¸c ®Þnh vÞ trÝ ®Çu bµn kÑp so víi
hÖ ®Õ. Ba cét cña ma trËn R t−¬ng øng víi h−íng cña ba vect¬ ®¬n vÞ trªn hÖ g¾n víi tay
kÑp so víi hÖ ®Õ r«bèt (hÖ to¹ ®é nÒn).
VÞ trÝ cña mét ®iÓm P thuéc tay kÑp ®−îc x¸c ®Þnh theo c«ng thøc :
()
0
n′
pp
r=H qr (2.3)
trong ®ã p
r lµ vect¬ ®Þnh vÞ ®iÓm P thuéc tay kÑp so víi hÖ to¹ ®é nÒn, ′p
r lµ vect¬ ®Þnh
vÞ ®iÓm P trong hÖ to¹ ®é g¾n vµo tay kÑp r«bèt.
Tõ c«ng thøc (2.3) ta dÔ dµng x¸c ®Þnh ®−îc vËn tèc ®iÓm P g¾n vµo tay kÑp
r«bèt so víi hÖ to¹ ®é nÒn :
′
pp np
0
v=r=H.r
&
& (2.4)
§Ó tiÕn hµnh ®iÒu khiÓn ho¹t ®éng cña tõng kh©u r«bèt, ta tiÕn hµnh biÓu diÔn
ma trËn n
0
H
& d−íi d¹ng sau :
∑
n
n(i)
0i
i=1
H= Hq
&& (2.5)
trong ®ã H(i) lµ ma trËn øng víi khíp i vµ chØ phô thuéc vµo biÕn khíp, p
r
&lµ vÐc t¬ vËn
tèc cña ®iÓm cuèi tay kÑp so víi hÖ to¹ ®é nÒn,
n
0
H
& lµ ma trËn ®¹o hµm cña ma trËn

Denavit-Hartenberg gi÷a hÖ to¹ ®é nÒn víi hÖ to¹ ®é g¾n vµo tay kÑp, i
q
& lµ vËn tèc cña
chuyÓn ®éng t¹i khíp thø i.
§èi víi bµi to¸n thuËn ®éng häc, tøc lµ biÕt c¸c to¹ ®é suy réng vµ c¸c vËn tèc
suy réng, ta cã thÓ tÝnh ra ®−îc vÞ trÝ vµ vËn tèc cña bµn kÑp. Tuy nhiªn bµi to¸n ng−îc
th× phøc t¹p h¬n nhiÒu nÕu ta xÐt ®Õn c¸c vÞ trÞ suy biÕn, c¸c vÞ trÝ n»m ngoµi khu vùc
ho¹t ®éng cña robot..., lóc ®ã th«ng thuêng ta sÏ gÆp rÊt nhiÒu khã kh¨n ®Ó t×m ra lêi
gi¶i, tøc lµ c¸c to¹ ®é suy réng vµ c¸c vËn tèc suy réng cña c¸c khíp
2.2.2 Bµi to¸n ®iÒu khiÓn tèi −u víi bµi to¸n ng−îc.
Môc ®Ých cña bµi to¸n tèi −u lµ t×m ra c¸c th«ng sè ®Þnh vÞ vµ vËn tèc cña r«bèt
khi cho r«bèt n¾m b¾t mét ®èi t−îng ®ang chuyÓn ®éng. Víi d÷ liÖu ®Çu vµo lµ vÞ trÝ,
vËn tèc vµ h−íng n¾m b¾t ®èi t−îng, ta gi¶i quyÕt bµi to¸n b»ng ph−¬ng ph¸p tèi −u víi
hµm môc tiªu cã d¹ng:
()()()()()
()
()()()
22222
*****
12 345
222
2***
*
67 8 9
PPPPP
PPP
Pxx yy zz
Frx x ry y rz z rx x ry y
rz z rR R rR R rR R
=−+−+−+−+−
+−+ − + − + −
&& & &
&&
(2.6)
Trong ®ã:
• ***
,,xyz lµ to¹ ®é hiÖn thêi cña ®èi t−îng di chuyÓn.
• ***
,,xyz
&&&
lµ vËn tèc hiÖn thêi cña ®èi t−îng di chuyÓn.
• ***
,,
xyz
RRR lµ h−íng cÇn n¾m b¾t ®èi t−îng.
• ,,
PPP
xyz
lµ to¹ ®é hiÖn thêi cña ®Çu tay kÑp r«b«t.
• ,,
PPP
xyz
&&&
lµ vËn tèc hiÖn thêi cña ®Çu tay kÑp r«b«t.
• ,,
PPP
xyz
RRR lµ h−íng tay kÑp r«b«t.
• r1->r9 lµ c¸c träng sè
Tõ c¸c th«ng sè ch−a biÕt lµ hµm cña c¸c th«ng sè ®Þnh vÞ vµ th«ng sè vËn tèc cña r«bèt.
() ( ) ()
() ( ) ()
() ( ) ()
(1) (2) (3)
(1) (2) (3)
(1) (2) (3)
,,,
,,,
,,,
pP P
xxxx
pP P
yyyy
pP P
zzzz
xf xf Rf
yf yf Rf
zf zf Rf
== =
== =
== =
qqqq
qqqq
qqqq
&
&
&
&
&
&
(2.7)
Ta thu ®−îc hµm môc tiªu F cã d¹ng:
()
,FF=qq
& (2.8)
Hµm môc tiªu F lµ hµm chØ phô thuéc vµo c¸c th«ng sè ®Þnh vÞ vµ th«ng sè vËn tèc. Khi
cho F -> min ta sÏ thu ®−îc c¸c th«ng sè ®Þnh vÞ vµ th«ng sè vËn tèc: ,
q
q
&. ¦u ®iÓm cña
ph−¬ng ph¸p nµy lµ cã thÓ dïng ®Ó gi¶i quyÕt bµi to¸n ng−îc cña r«bèt mét c¸ch tæng
qu¸t vµ mÒm dÎo mµ kh«ng bÞ giíi h¹n bëi sè bËc tù do cña r«bèt.
Víi møc ®é phøc t¹p cña bµi to¸n, nhÊt lµ ®èi víi c¸c bµi to¸n tæng qu¸t cÇn thiÕt
ph¶i sö dông c¸c ph−¬ng ph¸p sè ®Ó gi¶i quyÕt bµi to¸n tèi −u. ViÖc nµy ®ßi hái ph¶i co
c¸c thuËt gi¶i tèi −u tèt. C¸c hµm môc tiªu ®ßi hái viÖc tÝnh to¸n x¸c ®Þnh vÞ c¸c th«ng
sè cña ®èi t−îng ®éng lóc ®ang di chuyÓn. C¸c th«ng sè nµy cã thÓ ®−îc ®−a vµo d−íi
d¹ng hµm gi¶i tÝch, tuy nhiªn hoµn toµn cã thÓ sö dông c¸c d÷ liÖu ®−îc ®−a vµo theo
tïng thêi ®iÓm (vÝ dô sö dông camera...). §iÒu nµy râ rµng ®−a ra nh÷ng yªu cÇu vÒ c¸c
kh¶ n¨ng tÝnh to¸n vµ xö lý th«ng tin cña c¸c m¸y tÝnh. T−¬ng tù nh− vËy cã thÓ thÊy
r»ng mçi b−íc tèi −u ®ßi hái ph¶i gi¶i quyÕt bµi to¸n thuËn nhiÒu lÇn, ®iÒu nµy ®ßi hái
kh¸ cao vÒ tèc ®é, thêi gian tÝnh to¸n.... ®Ó cã thÓ b¾t kÞp ®èi t−îng ®ang di chuyÓn.
2.2.3 M« pháng ®å ho¹ ®éng cña robot
§Ó minh ho¹ vµ theo dâi qu¸ tr×nh lµm viÖc cña robot ta cã thÓ m« pháng qu¸
tr×nh ho¹t ®éng cña robot th«ng qua viÖc x©y dùng ®å ho¹ ®éng cho m« h×nh. Cã nhiÒu
kü thuËt ®Ó x©y dùng thùc tr¹ng ¶o hç trî cho muc ®ich nµy. Nhãm nghiªn cøu ®· x©y
d−ng ch−¬ng tr×nh m¸y tÝnh viÕt b»ng ng«n ng÷ C++ sö dông c«ng cô lËp tr×nh Visual
C++ 6.0 cã sù hç trî cña th− viÖn ®å ho¹ OpenGL. Lý do ®Ó chän c¸c c«ng cô nµy lµ ta
cã thÓ sö dông chóng trªn c¸c m¸y tÝnh c¸ nh©n th«ng th−êng
2.3 §¸nh gi¸ qua vÝ dô cô thÓ
Nhãm nghiªn cøu ®· x©y dùng ch−¬ng tr×nh m« pháng qu¸ tr×nh n¾m b¾t ®èi
tuîng cña robot Gryphon. Toµn bé qua tr×nh m« pháng ®−îc thùc hiÖn trªn c¸c m¸y tÝnh
c¸ nh©n th«ng th−êng víi bé vi xö lý Pentium III.
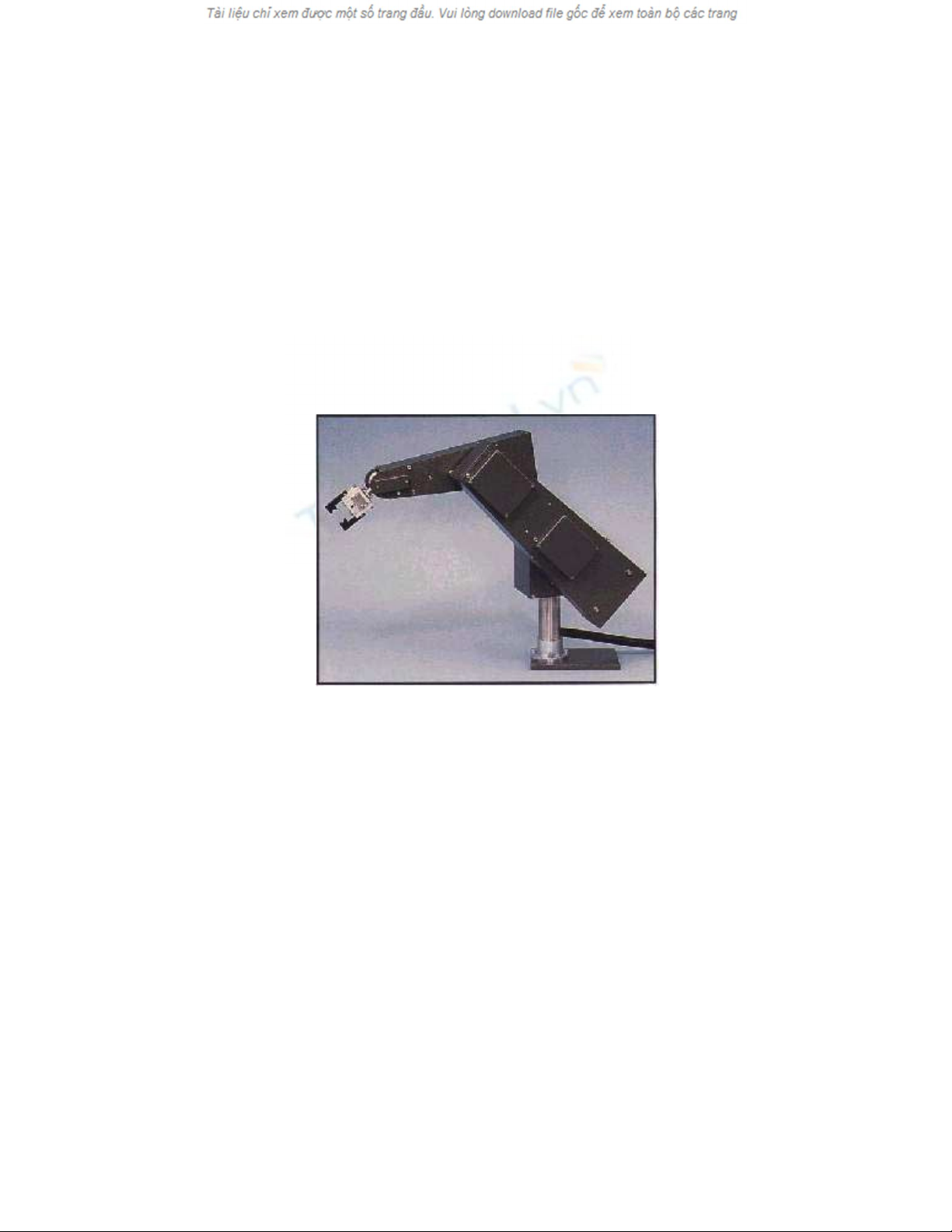
Robot Gryphond do h·ng Feedback cña Anh s¶n xuÊt phôc vô cho môc ®Ých
nghiªn cøu. §©y lµ mét r«bèt n¨m trôc: trôc h«ng, trôc vai, trôc khuûu tay, trôc cæ tay
(pitch), trôc cæ tay (roll) va bµn kÑp, xem h×nh vÏ 1.
H×nh 1
Nh÷ng −u ®iÓm næi bËt cña r«bèt lµ chuyÓn ®éng nhanh, chÝnh x¸c vµ mÒm m¹i.
R«bèt ®−îc ®iÒu khiÓn bëi bèn vi xö lý cho phÐp ®iÒu khiÓn ®Æt vËt chÝnh x¸c. Mçi trôc
cña r«bèt ®−îc ®iÒu khiÓn bëi mét ®éng c¬ b−íc víi bé m· ho¸ ph¶n håi. Trong bé ®iÒu
khiÓn, mét vi xö lý sÏ gi¸m s¸t vÞ trÝ cña c¸c trôc. Hai c¸i kh¸c sÏ qu¶n lý c¸c ®éng c¬
vµ c¸i cßn l¹i sÏ gi¸m s¸t c¶ ba c¸i trªn ®ång thêi lµm nhiÖm vô giao tiÕp víi m¸y chñ.
ViÖc tÝnh to¸n m« pháng trªn m¸y tÝnh c¸ nh©n ®−îc thùc hiÖn th«ng qua c¸c
c«ng thøc ®· ®−îc tr×nh bµy s¬ l−îc trong phÇn 2.2. Trong bµi to¸n tèi −− ph−¬ng ph¸p
tèi −u sè ®−îc sö dông lµ ph−¬ng ph¸p Rosenbrock. §©y lµ ph−¬ng ph¸p kh«ng cÇn tÝnh
®Õn c¸c gi¸ trÞ ®¹o hµm cña hµm môc tiªu vµ sÏ t×m c¸c gi¸ trÞ tèi −u cña hµm sè theo
c¸c h−íng x¸c ®Þnh trong mçi giai ®o¹n cña qu¸ tr×nh t×m kiÕm.
KÕt qu¶ tÝnh to¸n cho thÊy c¸c thuËt gi¶i ho¹t ®éng tèt. C¸c kÕt qu¶ m« pháng vµ
gi¸ trÞ cña c¸c to¹ ®é suy réng lµ liªn tôc ë mäi vÞ trÝ cña quÜ ®¹o. §iÒu ®ã cho phÐp
robot ho¹t ®éng mÒm m¹i vµ n¾m b¾t ®èi t−îng t−¬ng ®èi ªm.
Tuy nhiªn tèc ®é thÓ hiÖn ®å ho¹ ®éng th× cßn xa míi cã thÓ ®¹t ®−îc kh¶ n¨ng
m« pháng thêi gian thùc. §iÒu nµy lµ hoµn toµn dÔ hiÓu v× toµn bé ch−ong tr×nh chØ ch¹y
trªn 1 m¸y tinh c¸ nh©n theo thuËt gi¶i "th¼ng". §©y chÝnh lµ ®iÓm cã thÓ øng dông c«ng
nghÖ th«ng tin ngâ hÇu t¨ng tèc ®é tÝnh to¸n vµ m« pháng.
Cã nhiÒu c¸ch ®Ó cã thÓ ®¹t ®−îc môc ®Ých nµy. §iÒu ®ã phô thuéc vµo c¸c c«ng
cô phÇn cøng vµ mÒm mµ chóng ta cã trong tay. Liªn quan ®Õn viÖc sö dông c¸c thuËt

gi¶i song song ®Ó gi¶i quyÕt bµi to¸n trªn, ta cã thÓ "song song ho¸" qu¸ tr×nh tÝnh to¸n,
®−îc m« t¶ trong phÇn 2.2 ë c¸c phÇn sau:
• Trong viÖc gi¶i quyÕt bµi to¸n tèi −u, c¸c gi¸ trÞ cña c¸c ma trËn thµnh phÇn,
c¸c phÇn tö trong c«ng thøc (2.1), (2.2),... ®−îc xö lý ®ång thêi.
• ViÖc thÓ hiÖn (vÏ) c¸c kh©u kh¸c nhau cña robot trong qu¶ tr×nh m« pháng
®−îc xö lý ®ång thêi.
C¸c vÊn ®Ò nµy cÇn ®−îc nghiªn cøu, thö nghiÖm vµ ®¸nh gi¸ chÝnh x¸c, so sanh
gi÷a c¸c tr−êng hîp cã 1 m¸y tÝnh (1 vi xö lý) vµ c¸c hÖ m¸y tÝnh chøa nhiÒu vi xö lý
hon.
3. Vi dô thø 2: ®éng lùc hoc hÖ nhiÒu vËt
Trong phÇn nµy ta xÐt ®Õn mét sè vÊn ®Ò xuÊt hiÖn trong qu¸ tr×nh tÝnh to¸n m«
pháng ®éng lùc häc hÖ nhiÒu vËt. Qu¸ tr×nh m« pháng b¨t ®Çu tõ viÖc x©y dông ph−¬ng
tr×nh chuyÓn ®éng, gi¶i vµ m« pháng ®éng hÖ c¬ nhiÒu vËt.
3.1 C¬ së lý thuyÕt
ViÖc m« pháng sè c¸c hÖ c¬ nhiÒu vËt lµ vÊn ®Ò thêi sù, cµng ngµy cµng ®uîc
quan t©m nhiÒu h¬n trong 2 thËp kû võa qua. Trªn thÕ giíi hiÖn ®· tån t¹i mét sè phÇn
mÒm trong lÜnh vùc nµy nh−: ADAMS, SIMPACK, NEWEUL, ALASKA,.... Chóng cã
thÓ ®−îc sö dông trong c¶ c¸c lÜnh vùc nghiªn cøu vµ øng dông c«ng nghiÖp. Tuy nhiªn
c¸c phÇn mÒm nµy ®Òu cã nh÷ng nh−îc ®iÓm riªng, nh− xö lý ®å ho¹ vµ giao diÖn ch−a
tèt, kh¶ n¨ng xö lý thêi gian thùc ch−a cã... vµ h¬n thÕ n÷a gi¸ thµnh cao. ViÖc nghiªn
cøu x©y d−ng mét ch−¬ng tr×nh phï häp víi ®iÒu kiÖn Viªt nam ®· ®uîc tiÕn hµnh tõng
buíc vµ ®· ®¹t ®−îc mét sè kÕt qu¶, th«ng qua viÖc x©y dùng gãi ch−¬ng tr×nh bao gåm
nhiÒu module phôc vô m« pháng.
§Ó viÕt ph−¬ng trinh chuyÓn ®éng cña hÖ c¬ nhiÒu vËt ta cã thÓ dïng nhiÒu
ph−¬ng ph¸p kh¸c nhau. §Ó minh ho¹ ta cã thÓ sö dông phu¬ng trinh hay ®−îc nh¾c ®Õn
nhiÒu nhÊt: ph−¬ng tr×nh Lagrange lo¹i II. NÕu sö dông c¸c to¹ ®é suy réng ®ñ qi ,
i=1,2,...n víi n lµ sè bËc tù do cña c¬ hÖ, th× ph−¬ng trinh Lagrange lo¹i II ®−îc viÕt nh−
sau:
dT T
dt
∂∂
−=
∂∂
Q
qq
&
TT
(3.1)
trong ®ã T lµ tæng ®éng n¨ng cña c¶ c¬ hÖ, Q lµ vector c¸c lùc suy réng, q vµ q
& lµ c¸c
vector to¹ ®é suy réng vµ vËn tèc suy réng, t lµ biÕn thêi gian. Ta cã hÖ ph−¬ng tr×nh vi
ph©n th−êng cÊp 2 (ODE).
§èi víi hÖ c¬ nhiÒu vËt th«ng th−êng ng−ßi ta hay sö dông c¸c t¹o ®é suy réng
d−, nh− thÕ ph−¬ng trinh Lagrange lo¹i II sÏ ®−îc thay b»ng ph−¬ng tr×nh Lagrange
d¹ng nh©n tö. Trong ph−¬ng tr×nh (3.1) sÏ xuÊt hiÖn thªm c¸c nh©n tö Lagrange vµ c¸c
®¹o hµm riªng cña c¸c ph−¬ng trinh liªn kÕt theo c¸c to¹ ®é suy réng qi. Cïng víi c¸c
ph−ong tr×nh liªn kÕt ta sÏ thu ®−îc hÖ ph−¬ng tr×nh vi ph©n ®¹i sè (DAE).
§Ó cã thÓ x©y dùng ®−îc ph−ong tr×nh chuyÓn ®éng cÇn thiÕt ph¶i tÝnh ®−îc biªñ
thøc ®éng n¨ng cña c¶ c¬ hÖ vµ c¸c ®¹o hµm riªng cña nã theo c¸c to¹ ®é suy réng vµ
c¸c vËn tèc suy réng. §éng n¨ng T cña c¶ c¬ hÖ ®−îc tÝnh nh− tæng ®éng n¨ng cña tÊt c¶
c¸c vËt thuéc c¬ hÖ:
1
N
k
k
TT
=
=∑ (3.2)
víi Tk lµ ®éng n¨ng cña vËt thø k vµ N lµ sè vËt r¾n thuéc c¬ hÖ. §éng n¨ng Tk cña tõng
vËt ®−îc tÝnh theo c¸c yÕu tè ®éng häc cña vËt r¾n ®ã. §©y lµ c«ng ®o¹n kh¸ phøc t¹p vµ
®ßi hái nh÷ng thuËt to¸n tèt ®Ó xö lý, ®ång thêi còng tèn nhiÒu thêi gian tÝnh to¸n. D−íi










![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)














