Đáp án Đi u khi n quá trình ề ể (PCTR421929), Đ 01, ềH C K I, 2017-2018Ọ Ỳ
BÀI 1:
(4 đ)
Đi mể
a. Tìm hàm truy n mô t m i quan h gi a ngõ ra và các ngõ vào?ề ả ố ệ ữ
2
( 1) ( 1)
( ) ( ) ( )
1 ( 1) 1 ( s 1)
s s
m c IP v p p
sp
s s
c IP v m p c IP v m p
K G K K K e s K e s
H s H s Q s
G K K K K e s G K K K K e
θ θ
θ θ
τ τ
τ τ
− −
− −
+ +
= +
+ + + +
Trong đó:
1
p
K R= =
;
AR 3
τ
= =
[min];
2
0.6
( ) ( ) ( )
3 1 0.6 3 1 0.6
ss
csp
s s
c c
G e e
H s H s Q s
s G e s G e
−−
− −
= +�+ + + +
0.5
0.5
b.
10
c
K=
, tìm đi u ki n c a ề ệ ủ
I
τ
đ h kín n đnh?ể ệ ổ ị
1 1
( ) 1 10 1
c c
I I
G s K s s
τ τ
� � � �
= + = +
� � � �
� � � �
Ph ng trình đc tr ng h kín:ươ ặ ư ệ
1
3 1 0.6 10 1 0
s
I
s e
s
τ
−
� �
+ + + =
� �
� �
X p x Taylor: ấ ỉ
1
s
e s
−
−;
(3 1) 6( 1)(1 ) 0
I I
s s s s
τ τ
+ + + − =�
2
3 (7 6) 6 0
I I
s s
τ τ
− + − + =�
Đ h n đnh các h s ph i cùng d u ể ệ ổ ị ệ ố ả ấ
0
I
τ
<�
Do
I
τ
là th i gian tích phân c a b đi u khi n nên ờ ủ ộ ề ể
0
I
τ
>
. V y không t n t i ậ ồ ạ
I
τ
đ h kín n đnh.ể ệ ổ ị
0.5
0.5
c. Thi t k b đi u khi n PI ho c PID khi giá tr đt thay đi?ế ế ộ ề ể ặ ị ặ ổ
( )
( ) 1
c
sp c
G G
H s
H s G G
=+
Trong đó:
0.6
3 1
s
m IP v p
e
G K K K G s
−
= = +
S d ng các ph ng trình (4.43) và (4.44) trong slide bài gi ng, ta có ử ụ ươ ả
c
G
là
b đi u khi n PI v i các h s :ộ ề ể ớ ệ ố
32.5
( ) 0.6(1 1)
c
c
KK
τ
τ θ
= = =
+ +
3
I
τ τ
= =
1
( ) 2.5 1 3
c
G s s
� �
= +�� �
� �
0.5
0.5
d. Tính sai s (offset) trong tr ng h p s d ng b đi u khi n t l vàố ườ ợ ử ụ ộ ề ể ỉ ệ
nhi u thay đi?ễ ổ
Hàm tr không nh h ng đn đ l i tĩnh c a h nên ta có th s d ngễ ả ưở ế ộ ợ ủ ệ ể ử ụ
công th c tính offset (4.30)ứ
offset =
2 2 2
1
d
OL
K
K Q Q
K
− ∆ = − ∆
+
Trong đó:
1
d p
K K= =
;
0.6
OL m c v IP p c
K K K K K K K= =
V y ậ
2
1 0.6
c
Q
offset K
∆
= − +
1
BÀI 2:
(3 đ)
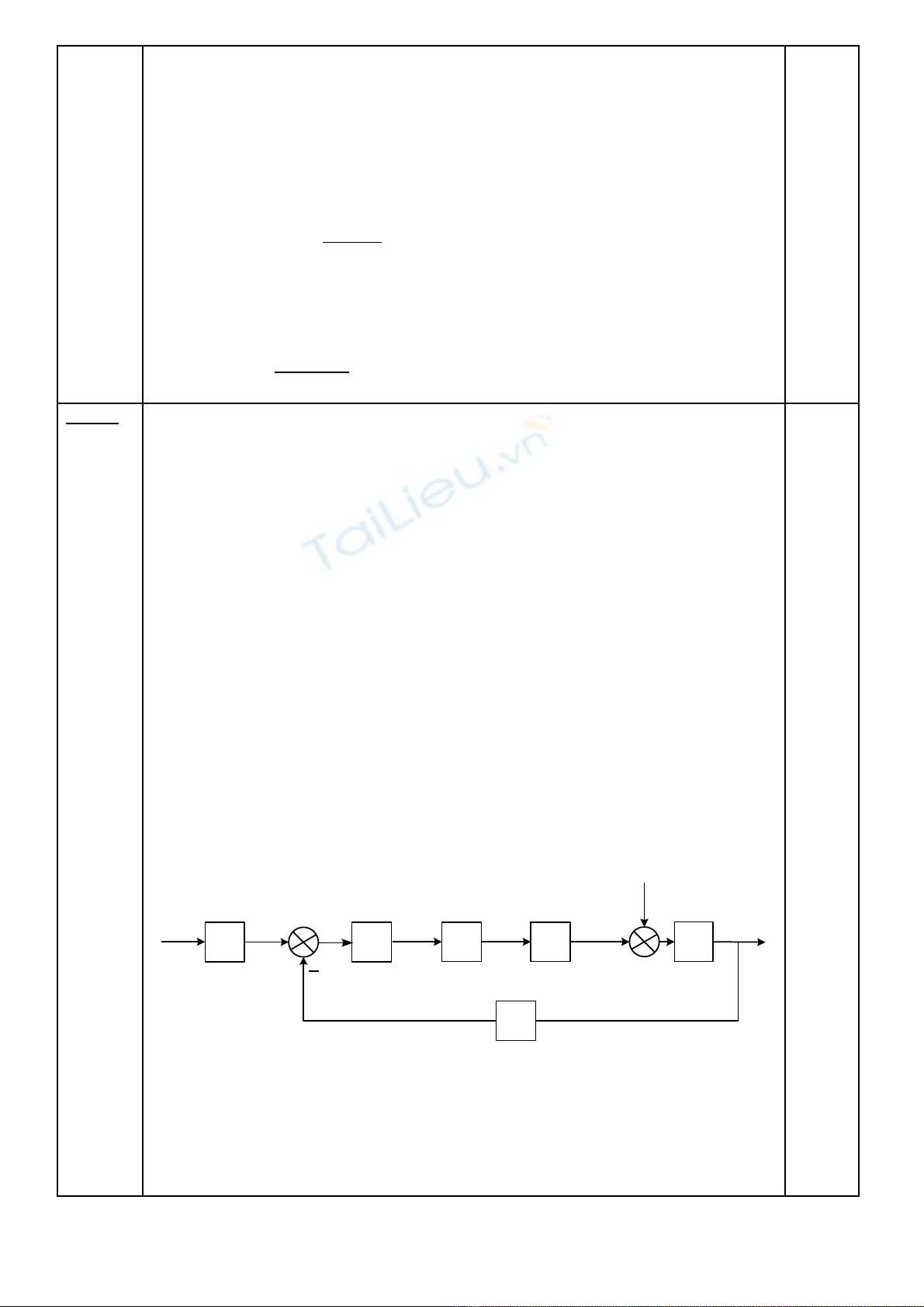
a. Các bi n quá trình:ế
MV:
s
P
CV:
2
T
DV:
1
T
Đây là quá trình trao đi nhi t, nhi t đ dòng ra ổ ệ ệ ộ
2
T
đc đi u khi n b ngượ ề ể ằ
cách thay đi l u l ng h i (ổ ư ượ ơ
s
P
) đa vào bình đ trao đi nhi t v i dòngư ể ổ ệ ớ
vào có nhi t đ ệ ộ
1
T
. S d ng thi t b đo đ đo nhi t đ dòng ra (ử ụ ế ị ể ệ ộ
2
T
) tr vả ề
tín hi u đi n và đc đa vào b đi u khi n nhi t đ (TC), tín hi u raệ ệ ượ ư ộ ề ể ệ ộ ệ
c a b đi u khi n (tín hi u đi n) đc chuy n thành tín hi u áp su tủ ộ ề ể ệ ệ ượ ể ệ ấ
thông qua b chuy n đi (I/P) đ đi u khi n đ m van đi u khi n nh mộ ể ổ ể ề ể ộ ở ề ể ằ
thay đi l u l ng h i đi vào.ổ ư ượ ơ
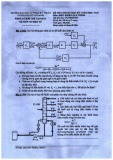
b.
c
G
IP
K
v
G
p
G
m
K
m
K
2
( )
sp
T s
2
( )
sp
T s
( )E s
( )
t
P s
( )
s
P s
2
( )T s
2
( )
m
T s
1
( )T s
Trong đó:
c
G
: hàm truy n b đi u khi nề ộ ề ể
IP
K
: h s c a b chuy n đi t đi n sang áp su tệ ố ủ ộ ể ổ ừ ệ ấ
v
G
: hàm truy n c a van đi u khi nề ủ ề ể
0.5
0.5
1
Trang 2
p
G
: hàm truy n c a b n trao đi nhi tề ủ ồ ổ ệ
m
K
: h s chuy n đi c a thi t b đoệ ố ể ổ ủ ế ị
c.
2
2
( )
( ) 1
c
sp c
G G
T s
T s G G
=+
Trong đó
2 1.35
0.9 0.75 2 1 2 1
s s
m IP v p
e e
G K K G G s s
− −
= = =
+ +
Ch n ọ
1
c
τ θ
= =
(Skogestad)
S d ng b đi u khi n PID v i công th c (4.66), ta cóử ụ ộ ề ể ớ ứ
1 2 1 2 2 1 1.2345
2 1.35 2 1 1
c
c
KK
τ θ
τ θ
+ +
= = =
+ +
12 2.5
2 2
I
θ
τ τ
= + = + =
20.4
2 2 2 1
D
τθ
ττ θ
= = =
+ +
V y b đi u khi n: ậ ộ ề ể
1
( ) 1.2345 1 0.4
2.5
c
G s s
s
� �
= + +
� �
� �
0.5
0.5
Bài 3:
(3đ)
a.
- Most RTDs consist of a length of fine coiled wire wrapped around a
ceramic or glass core. The RTD element is made from a pure material,
typically platinum, nickel or copper.
- Its principle is based on a physical phenomenon that the material resistance
is a function of its temperature
2
0
(1 )
T
R R AT BT= + +
Where, : resistance of sensor at T (0C)
: resistance of sensor at 0 (0C)
A, B: temperature coefficients (A>0)
1
b. Platinum (Pt) is the most popular since it can be used for a wide
temperature range and has excellent stability. Therefore, it is suitable for
industry applications
1
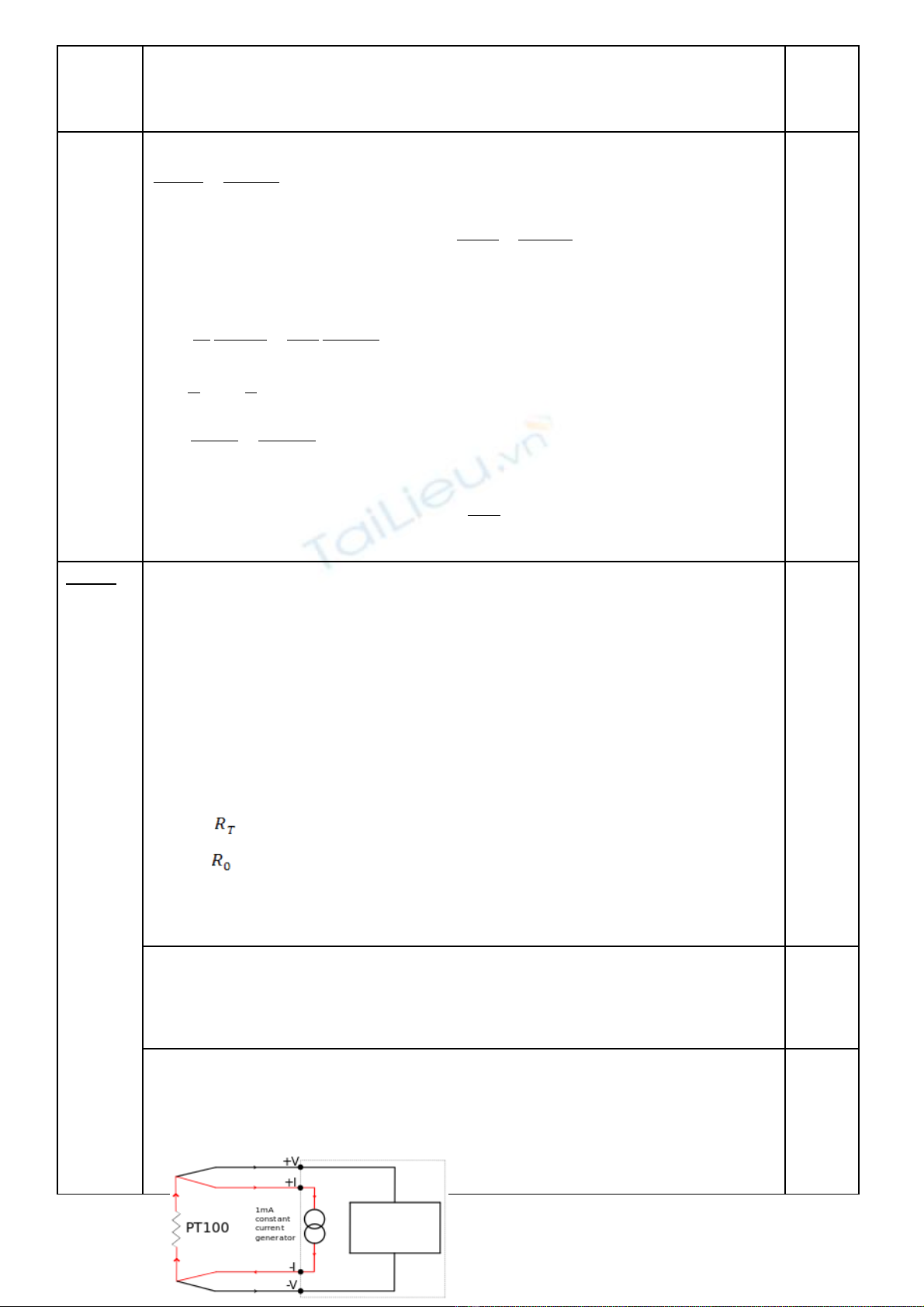
c. There are three types of wire configuration. They are two-wire, three-wire
and four-wire configurations. In four-
wire configuration:
Advantage: the most accuracy
1
Trang 3
ADC
Four-wire configuration
compared to the others
Disadvantage: it needs a current source (more expensive)
GV. Võ Lâm Ch ngươ
Trang 4

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)