
Đ c ng bài gi ng: K thu t c m bi nề ươ ả ỹ ậ ả ế
L I NÓI Đ UỜ Ầ
Trong n n công nghi p s n xu t hi n đ i ngày nay, r t nhi u nhà máy xí nghi pề ệ ả ấ ệ ạ ấ ề ệ
đã trang b cho mình nh ng dây chuy n s n xu t t đ ng ho c bán t đ ng. Các lo iị ữ ề ả ấ ự ộ ặ ự ộ ạ
c m bi n đã có m t trong h u h t các lĩnh v c đi u khi n t đ ng, nó đóng m t vai tròả ế ặ ầ ế ự ề ể ự ộ ộ
r t quan tr ng, không m t thi t b nào có th thay th đ c. Vi c trang b cho mình m tấ ọ ộ ế ị ể ế ượ ệ ị ộ
ki n th c v các lo i c m bi n là nhu c u b c thi t c a các k thu t viên, k s ngànhế ứ ề ạ ả ế ầ ứ ế ủ ỹ ậ ỹ ư
đi n cũng nh các ngành khác.ệ ư
Môn h c k thu t c m bi n là m t môn h c chuyên môn c a h c viên ngànhọ ỹ ậ ả ế ộ ọ ủ ọ
đi n công nghi p. Mô đun này nh m trang b cho h c viên nh ng ki n th c v nguyênệ ệ ằ ị ọ ữ ế ứ ề
lý, c u t o, các m ch ng d ng trong th c t c a m t s lo i c m bi n...V i các ki nấ ạ ạ ứ ụ ự ế ủ ộ ố ạ ả ế ớ ế
th c này h c viên có th áp d ng tr c ti p vào lĩnh v c s n xu t cũng nh đ i s ng.ứ ọ ể ụ ự ế ự ả ấ ư ờ ố
Ngoài ra các ki n th c này dùng làm ph ng ti n đ h c ti p các mô đun chuyên ngànhế ứ ươ ệ ể ọ ế
đi n nh trang b đi n, PLC c b n, PLC nâng cao... Mô đun này cũng có th là tài li uệ ư ị ệ ơ ả ể ệ
tham kh o cho các h c viên, cán b k thu t c a các ngành khác quan tâm đ n lĩnh v cả ọ ộ ỹ ậ ủ ế ự
này.
Biên so n: GV Nguy n Đ c Quýạ ễ ứ
Page 1
Đ c ng bài gi ng: K thu t c m bi nề ươ ả ỹ ậ ả ế
BÀI M Đ U: C M BI N VÀ NG D NGỞ Ầ Ả Ế Ứ Ụ
1. Khái ni m c b n v các b c m bi nệ ơ ả ề ộ ả ế
Trong quá trình s n xu t có nhi u đ i l ng v t lý nh : Nhi t đ , áp su t, t cả ấ ề ạ ượ ậ ư ệ ộ ấ ố
đ , kho ng cách, l u l ng... c n đ c x lý cho đo l ng và đi u khi n. Các b c mộ ả ư ượ ầ ượ ử ườ ề ể ộ ả
bi n th c hi n ch c năng này. B c m bi n còn có tên g i khác là đ u dò, b nh nế ự ệ ứ ộ ả ế ọ ầ ộ ậ
bi t.ế
C m bi n là m t b chuy n đ i k thu t đ chuy n đ i các đ i l ng v t lýả ế ộ ộ ể ổ ỹ ậ ể ể ổ ạ ượ ậ
không mang b n ch t đi n nh nhi t đ , áp su t, kho ng cách...sang m t đ i l ngả ấ ệ ư ệ ộ ấ ả ộ ạ ượ
khác đ đo, đ m đ c. Các đ i l ng này ph n l n là tín hi u đi n nh đi n áp, dòngể ế ượ ạ ượ ầ ớ ệ ệ ư ệ
đi n, đi n tr , t n s ...Các b c m bi n đ c đ nh nghĩa theo nghĩa r ng là thi t bệ ệ ở ầ ố ộ ả ế ượ ị ộ ế ị
c m nh n và đáp ng các tín hi u.ả ậ ứ ệ
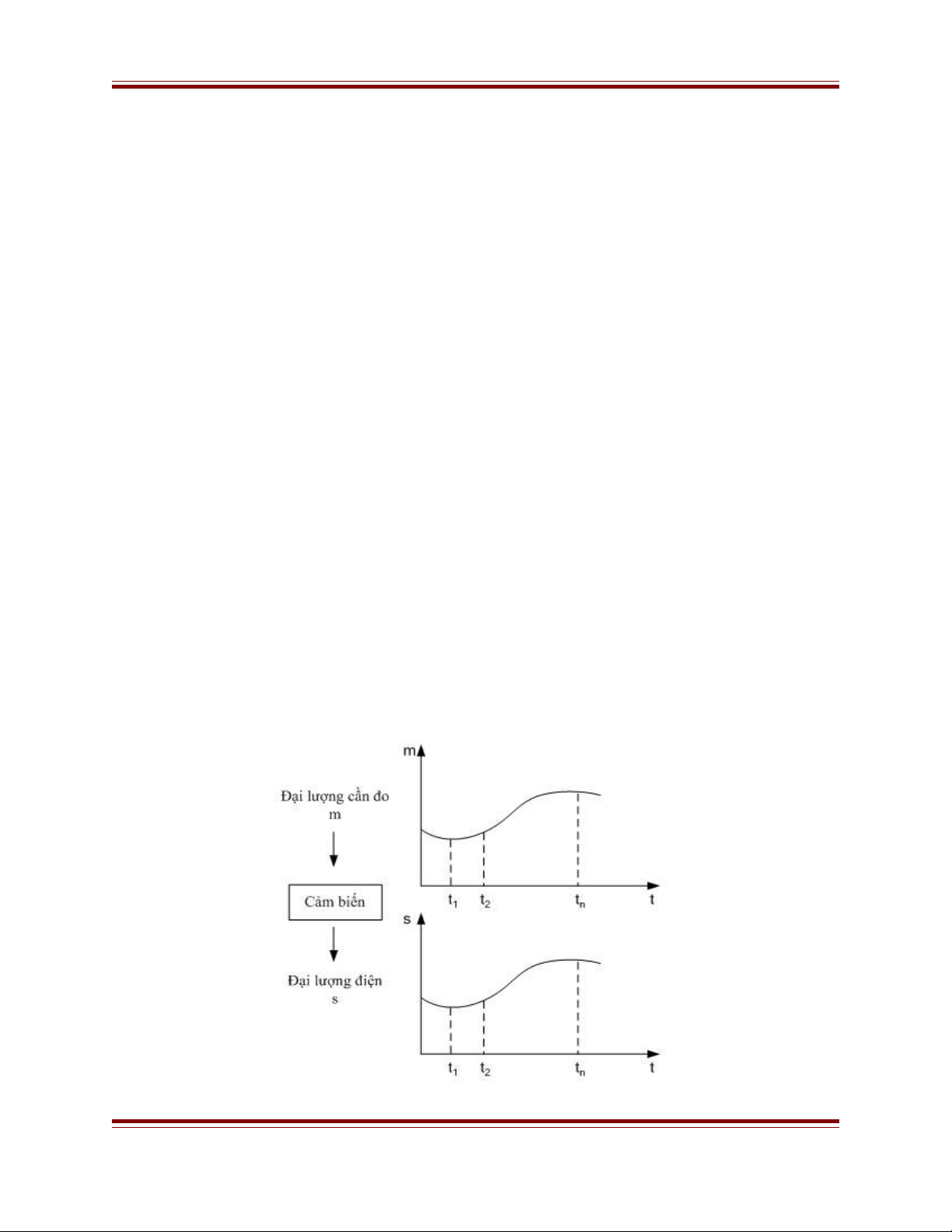
C m bi n là m t thi t b ch u tác đ ng c a đ i l ng c n ki m tra m không cóả ế ộ ế ị ị ộ ủ ạ ượ ầ ể
tính ch t đi n và cho ta m t đ c tr ng mang b n ch t đi n (nh đi n tích, đi n áp,ấ ệ ộ ặ ư ả ấ ệ ư ệ ệ
dòng đi n ho c tr kháng) ký hi u là s. Đ c tr ng đi n s là hàm c a đ i l ng c n đoệ ặ ở ệ ặ ư ệ ủ ạ ượ ầ
m. Công th c tính : ứ
s = f(m)
Trong đó s là đ i l ng đ u ra ho c ph n ng c a c m bi n và m là đ i l ngạ ượ ầ ặ ả ứ ủ ả ế ạ ượ
đ u vào hay kích thích (có ngu n g c là đ i l ng c n đo). Vi c đo đ c s cho phépầ ồ ố ạ ượ ầ ệ ạ
nh n bi t giá tr c a m.ậ ế ị ủ
Biên so n: GV Nguy n Đ c Quýạ ễ ứ
Page 2

Đ c ng bài gi ng: K thu t c m bi nề ươ ả ỹ ậ ả ế
Hình 1.1: S bi n đ i c a đ i l ng c n ki m tra m và ph n ng s theo th i gian.ự ế ổ ủ ạ ượ ầ ể ả ứ ờ
2 Các đ c tính tĩnh và đ ng c a c m bi n.ặ ộ ủ ả ế
2.1 Đ nh yộ ạ
a) Đ nh nghĩaị
Đ nh y S xung quanh m t giá tr không đ i mộ ạ ộ ị ổ i c a đ i l ng c n ki m tra đ củ ạ ượ ầ ể ượ
xác đ nh b i t s bi n thiên Δs c a đ i l ng đ u ra và bi n thiên Δm t ng ngị ở ỷ ố ế ủ ạ ượ ở ầ ế ươ ứ
c a đ i l ng ki m tra đ u vào:ủ ạ ượ ể ở ầ
i
mm
m
s
S
=
∆
∆
=
Thông th ng c m bi n đ c s n xu t có nh ng đ nh y S t ng ng v iườ ả ế ượ ả ấ ữ ộ ạ ươ ứ ớ
nh ng đi u ki n làm vi c nh t đ nh c a c m bi n. Đi u này cho phép l a ch n đ cữ ề ệ ệ ấ ị ủ ả ế ề ự ọ ượ
c m bi n thích h p đ sao cho m ch ki m tra tho mãn các đi u ki n đ t ra. ả ế ợ ể ạ ể ả ề ệ ặ
Đ n v đo c a đ nh y ph thu c vào nguyên lý làm vi c c a c m bi n và cácơ ị ủ ộ ạ ụ ộ ệ ủ ả ế
đ i l ng liên quan, ví d : ạ ượ ụ
- Ω/OC đ i v i nhi t đi n tr .ố ớ ệ ệ ở
- µV/ OC đ i v i c p nhi t.ố ớ ặ ệ
Đ i v i các c m bi n khác nhau cùng d a trên m t nguyên lý v t lý, tr s c aố ớ ả ế ự ộ ậ ị ố ủ
đ nh y S có th ph thu c vào v t li u, kích th c hay ki u l p ráp.ộ ạ ể ụ ộ ậ ệ ướ ể ắ
V n đ quan tr ng là khi thi t k và ch t o c m bi n làm sao đ khi s d ngấ ề ọ ế ế ế ạ ả ế ể ử ụ
c m bi n đ nh y S c a chúng không đ i, nghĩa là S ít ph thu c nh t và các y u tả ế ộ ạ ủ ổ ụ ộ ấ ế ố
sau:
- Giá tr c a đ i l ng c n đo m (đ tuy n tính) và t n s thay đ i c a nó (d i ị ủ ạ ượ ầ ộ ế ầ ố ổ ủ ả
thông)
- Th i gian s d ng (đ già hoá).ờ ử ụ ộ
- nh h ng c a các đ i l ng v t lý khác (không ph i đ i l ng c n đo) c aẢ ưở ủ ạ ượ ậ ả ạ ượ ầ ủ
môi tr ng xung quanh.ườ
Đây chính là nh ng căn c đ so sánh và l a ch n c m bi n.ữ ứ ể ự ọ ả ế
Biên so n: GV Nguy n Đ c Quýạ ễ ứ
Page 3
Đ c ng bài gi ng: K thu t c m bi nề ươ ả ỹ ậ ả ế
b) Đ nh y trong ch đ tĩnh.ộ ạ ế ộ
Chu n c m bi n ch đ tĩnh là d ng l i các giá tr sẩ ả ế ở ế ộ ự ạ ị i c a đ i l ng đi n đ uủ ạ ượ ệ ở ầ
ra t ng ng v i các giá tr không đ i mươ ứ ớ ị ổ i c a đ i l ng đo khi đ i l ng này đ t giá trủ ạ ượ ạ ượ ạ ị
làm vi c danh đ nh ( ng v i giá tr c c đ i t c th i). Đ c tr ng tĩnh c a c m bi nệ ị ứ ớ ị ự ạ ứ ờ ặ ư ủ ả ế
chính là d ng chuy n đ i đ th c a vi c chu n đó và đi m làm vi c Qạ ể ổ ồ ị ủ ệ ẩ ể ệ i c a c m bi nủ ả ế
chính là đ c tr ng tĩnh t ng ng v i các giá tr sặ ư ươ ứ ớ ị i, mi.
Đ nh y trong ch đ tĩnh chính là đ d c c a đ c tuy n tĩnh đi m làm vi c.ộ ạ ế ộ ộ ố ủ ặ ế ở ể ệ
N u đ c tuy n tĩnh không ph i là tuy n tính thì đ nh y trong ch đ tĩnh ph thu cế ặ ế ả ế ộ ạ ế ộ ụ ộ
vào đi m làm vi c. ể ệ
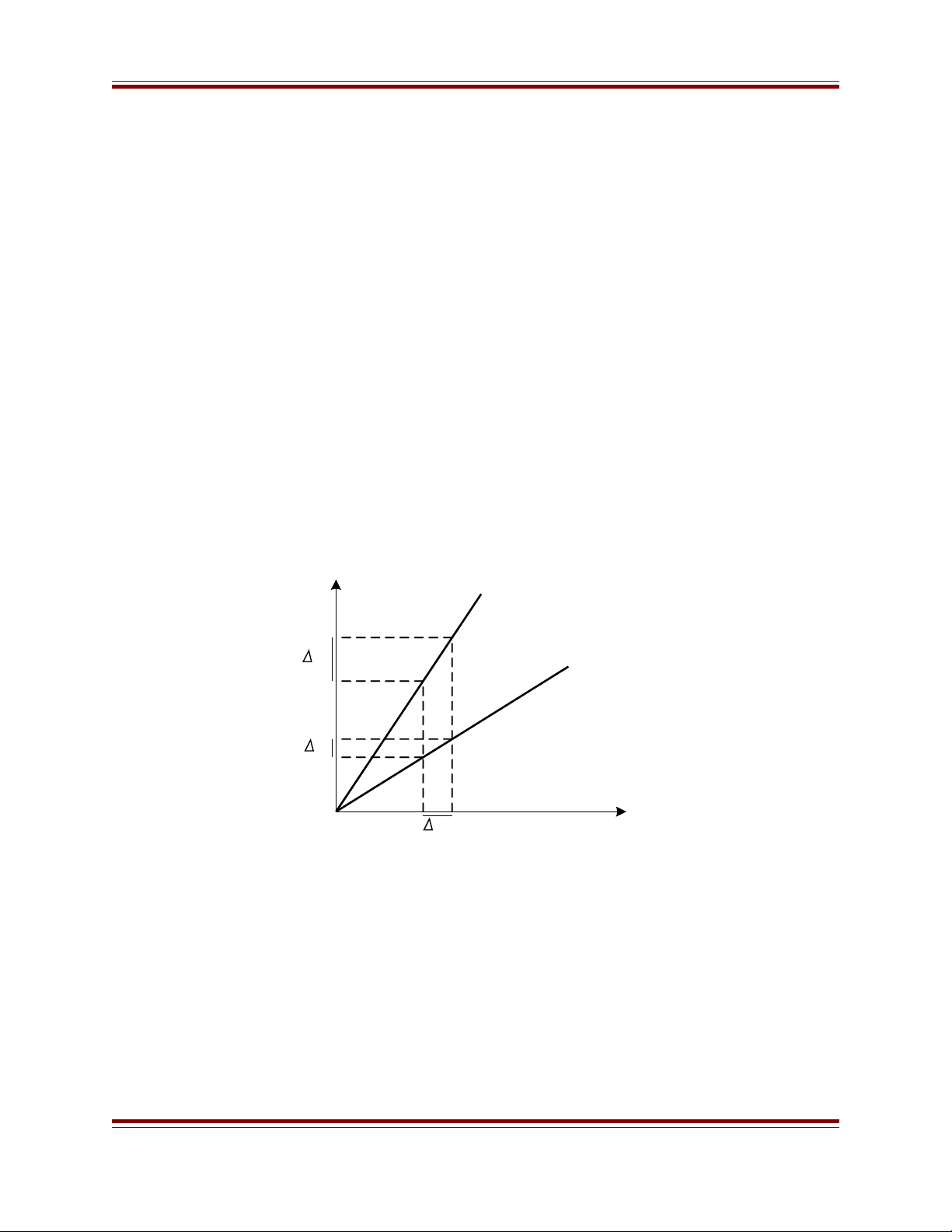
V i đ c tuy n tĩnh (đ ng cong chu n) c a c m bi n th hi n m i quan hớ ặ ế ườ ẩ ủ ả ế ể ệ ố ệ
gi a đ i t ng tác đ ng m và đ i l ng đ u ra là tuy n tính thì đ nh y c a c m bi nữ ố ượ ộ ạ ượ ầ ế ộ ạ ủ ả ế
ph thu c vào đ d c c a đ c tr ng tĩnh đó. N u đ d c c a nó càng l n thì đ nh yụ ộ ộ ố ủ ặ ư ế ộ ố ủ ớ ộ ạ
càng tăng, t c là v i m t s bi n thiên ứ ớ ộ ự ế ∆m r t nh cũng cho ta m t đ i l ng đ u ra ấ ỏ ộ ạ ượ ầ ∆s
t ng đ i l n. ươ ố ớ Đ c mô t trên hình v sau.ượ ả ẽ
s
1
s
2
m
m
s
§ Æc trung tÜnh 2
§ Æc trung tÜnh 1
Hình 1.2: S ph thu c c a đ nh y S vào đ d c c a đ c tr ng tĩnh.ự ụ ộ ủ ộ ạ ộ ố ủ ặ ư
Rõ ràng chúng ta th y ấ∆s1 nh h n ỏ ơ ∆s2 nh v y đ nh y c a c m bi n có đ cư ậ ộ ạ ủ ả ế ặ
truy n v i đ d c l n t c là bi n thiên đ u vào nh và cho ta 1 s thay đ i l n đ uế ớ ộ ố ớ ứ ế ầ ỏ ự ổ ớ ở ầ
ra.
c) Đ nh y trong ch đ đ ngộ ạ ế ộ ộ
Biên so n: GV Nguy n Đ c Quýạ ễ ứ
Page 4
Đ c ng bài gi ng: K thu t c m bi nề ươ ả ỹ ậ ả ế
Đ nh y trong ch đ đ ng đ c xác đ nh khi đ i l ng ki m tra là hàm tu nộ ạ ế ộ ộ ượ ị ạ ượ ể ầ
hoàn c a th i gian. Trong đi u ki n nh v y, đ i l ng đ u ra s ch đ làm vi củ ờ ề ệ ư ậ ạ ượ ầ ở ế ộ ệ
danh đ nh cũng là hàm tu n hoàn theo th i gian gi ng nh đ i l ng ki m tra.ị ầ ờ ố ư ạ ượ ể
Gi s đ i l ng ki m tra có d ng:ả ử ạ ượ ể ạ
m(t) = m0 + m1cosωt
Trong đó:
- m0 là giá tr không đ iị ổ
- m1 là biên đ ộ
- f = ω/2π là t n s bi n thiên c a đ i l ng ki m tra.ầ ố ế ủ ạ ượ ể
V y đ u ra c a c m bi n ta thu đ c đ i l ng s có d ng:ậ ở ầ ủ ả ế ượ ạ ượ ạ
s(t) = s0 + s1cos(ωt + φ)
Trong đó:
- s0 là đ i l ng không đ i t ng ng v i mạ ượ ổ ươ ứ ớ 0 xác đ nh đi m Qị ể 0 trên đ ng congườ
chu n ch đ tĩnh. ẩ ở ế ộ
- s1 là biên đ bi n thiên đ u ra do thành ph n bi n thiên c a đ i l ng ki mộ ế ở ầ ầ ế ủ ạ ượ ể
tra m1 gây nên.
- φ là đ l ch pha gi a đ u vào và đ u ra c a c m bi n.ộ ệ ữ ầ ầ ủ ả ế
Đ nh y trong tr ng h p này đ c xác đ nh nh sau: ộ ạ ườ ợ ượ ị ư
0
1
1
Q
m
s
S
=
Ngoài ra trong ch đ đ ng đ nh y c a c m bi n còn ph thu c vào t n s c aế ộ ộ ộ ạ ủ ả ế ụ ộ ầ ố ủ
đ i l ng đo m và ta có S(f) xác đ nh đ c tính t n s c a c m bi n.ạ ượ ị ặ ầ ố ủ ả ế
2.2 Đi u ki n có tuy n tínhề ệ ế
M t c m bi n đ c g i là tuy n tính trong m t d i đo xác đ nh n u trong d i đóộ ả ế ượ ọ ế ộ ả ị ế ả
đ nh y không ph thu c vào giá tr c a đ i l ng đo.ộ ạ ụ ộ ị ủ ạ ượ
Biên so n: GV Nguy n Đ c Quýạ ễ ứ
Page 5



![Đồng hồ đo thông minh: 6 gợi ý và các phụ tải nút [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130701/lilinz/135x160/2481372680874.jpg)
![Đồng hồ đo thông minh và phụ tải nút: 6 gợi ý [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504817_349.jpg)

![Quy trình thu thập, phân tích sự cố trên hệ thống điện quốc gia [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130314/congbn/135x160/3931363223933.jpg)



















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)