t L C
T R U IN G D A I HOC SU' PHAM K Y T H U A T
TH AN H PHO HO CHI M IN H
KHOA CO KHI CHE TAO MAY
BO MON CO DIEN TU
BE THI CUOI HOC KY I NAM HOC 2023-2024
Mon: Ky thuat Robot (CLC)
Mambnhoc: R0B0331129
De so/Ma de: 01 De thi co: 02 trang.
Thai gian: 60 phut.
Dugc phep sir dung 1 to A4 tai lieu.
Cau 1: (3.0 diem)
a) Trong toa do cue bo (local frame B), cho toa do H Px thuc hien lan lugt phep xoay
25° quay true x b ta dugc he tga do xiyizi, sau do tiep tuc xoay 30° quanh true yB
thi ta dugc he tga do x:?yiZ2, sau khi thuc hien cac phep xoay thi dugc
B^ = [ - l 2 3]r . Tim tga do H Px trude khi xoay, tren tga do cue bo B. (1.5d)
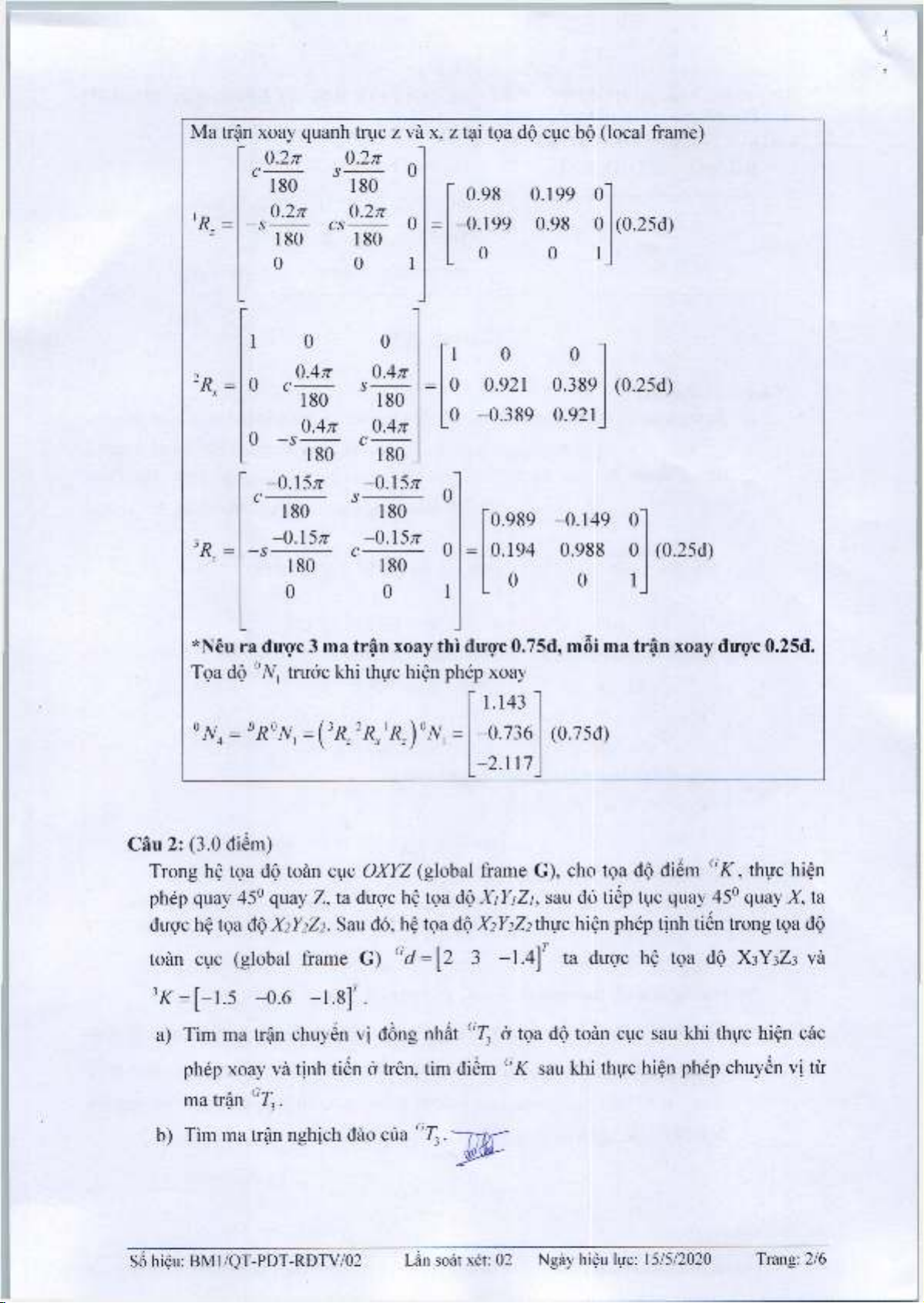
b) Cho he tga do ban dau la xoyozo, cho tga do diem °NX = [1 0.2 -2 .3 f , thuc
hien phep xoay 0.2 [rad] quay true zn ta dugc he tga do xiyizi, tiep tuc thuc hien
phep xoay 0.4 [rad] quay true xo, ta dugc he tga do xiyizi, tiep tuc thuc hien phep
xoay -0.15 [rad] quay true zo, thi dugc diem 0 N4. Tim tga do diem {) N4 sau khi
thuc hien cac phep xoay. (1.5d)
Cau 2: (3.0 diem)
Trong he tga do toan cue OXYZ (global frame G), cho tga do diem K , thuc hien
phep quay 45° quay Z, ta dugc he tga do X/Y/Zi, sau do tiep tuc quay 45° quay X, ta
dugc he tga do X2Y2Z2. Sau do, he tga do X2Y2Z2 thuc hien phep tinh tien trong tga do
toan ciic (global frame G) {,d = \ l 3 -1.4]r ta dugc he tga do X3Y3Z3 va
3K = [-1.5 -0.6 -1.8]7.
a) Tim ma tran chuyen vi dong nhat rT3 b tga do toan cue sau khi thuc hien cac
phep xoay va tinh tien b tren, tim diem 'K sau khi thuc hien phep chuyen vi tu
m a tran G7’3.
b) Tim ma tran nghich dao cua CT3.
S6 hieu: BM1/QT-PDT-RDTV/02 LAn soat xet: 02 Ngay hieu lire: 15/5/2020 Trang: 1/2
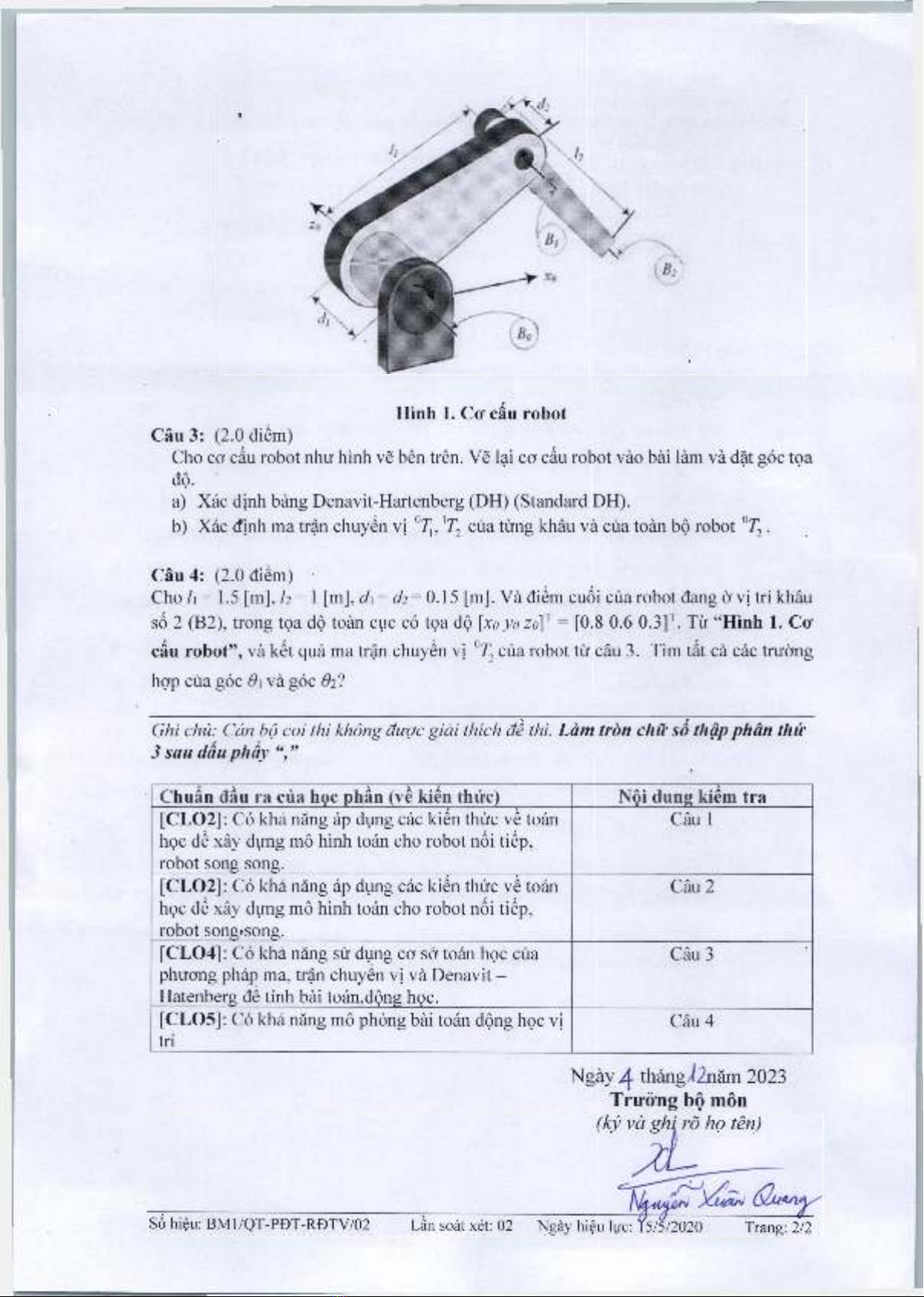
Hinh 1. Cff cau robot
Cau 3: (2.0 diem)
Cho ca cau robot nhu hinh ve ben tren. Ve lai ca cau robot vao bai lam va dat goc toa
do.
a) Xac dinh bang Denavit-Hartenberg (DH) (Standard DH).
b) Xac dinh ma tran chuyen vi °7],1T2 cua tirng khau va cua toan bo robot °T2.
Cau 4: (2.0 diem)
Cho /1 = 1.5 [m], h= 1 [m], d\ = di = 0.15 [m], Va diem cuoi cua robot dang a vi tri khau
so 2 (B2), trong toa do toan ciic co toa do [xoyo zo\1 = [0.8 0.6 0.3]1. Tu "‘Hinh 1. Co"
cau robot”, va ket qua ma tran chuyen vi °T2 cua robot tir cau 3. Tim tat ca cac truong
hop cua goc 6\ va goc G-ft
Ghi chu: Can bo coi thi khong ditac giai thick de thi. Lam trdn chit so thdp phan thie
3 sau dau phay ”
Chuan dau ra cua hoc phan (ve kien thuc) Noi dung kiem tra
[CL02]: Co kha nang ap dung cac kien thuc ve toan
hoc de xay dung mo hinh toan cho robot noi tiep,
robot song song.
Cau 1
[CL02]: Co kha nang ap dung cac kien thuc ve toan
hoc de xay dung mo hinh toan cho robot noi tiep,
robot song»song.
Cau 2
[CL04]: Co kha nang sir dung co so toan hoc cua
phuong phap ma, tran chuyen vi va Denavit -
Hatenberg de tinh bai toan,dong hoc.
Cau 3
[CL05]: Co kha nang mo phong bai toan dong hoc vi
tri
Cau 4
Ngay ^ thang./l2nam 2023
Trirang bo mon

©tL Q _
TRUCJNG DAI HOC SU PHAM KY THUAT
THANH PHO HO CHI MINH
KHOA CO KHI CHE TAO MAY
BO MON CO BIEN TET
DE THI CUOI HOC KY I NAM HOC 2023-2024
Mon: Ky thuat Robot (CLC)
M amon hgc: R0B0331129
De so/M a de: 01 De thi co: 02 trang.
Thdi gian: 60 phut.
Dugc phep su dung 1 to A4 tai lieu.
D A P A N
Cau 1: (3.0 diem)
a) Trong tga do cue bo (local frame B), cho toa do B P] thirc hien lan lugt phep xoay
25° quay true x b ta dirge he toa do x/y/zi, sau do tiep tuc xoay 30° quanh true yB
thi ta dugc he toa do xzy2Z2, sau khi thirc hien cac phep xoay thi dirge
B P} = [-1 2 3]r . Tim tga do H P} trirdc khi xoay, tren tga do cue bo B. (1.5d)
Ma tran xoay quanh true x,y tai tga do cue bo (local frame)
l 0 0 "1 0 0
BK = 0c25 525 =0 0.906 0.423
0-525 c25 0 -0.423 0.906
c30 0 -530“ 0.866 0 -0.5 "
X = 010-0 1 0
530 0 c30 0.5 0 0.866
(0.25d)
(0.25d)
Tga do BPi trirdc khi thirc hien phep xoay
BP3 = BR BP} = ( BRv X ) BPi
’P ^ C R / R , ) ' ' ‘ P,
0.634
0.503
3.653
(Id)
b) Cho he tga do ban dau la xnyozn, cho tga do diem °N ] = [l 0.2 -2.3]r , thirc
hien phep xoay 0.2 [rad] quay true zn ta dugc he tga do xiyizi, tiep tuc thirc hien
phep xoay 0.4 [rad] quay true xo, ta dugc he tga do xzy2Z2, tiep tuc thirc hien phep
xoay -0.15 [rad] quay true zo, thi dugc diem °7V4. Tim tga do diem °A^4 sau khi
So hieu: BM1/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu lire: 15/5/2020 Trang: 1/6
Ma tran xoay quanh true z va x, z tai toa do cue bo (local frame)
0 . 2 n
c
--------
s
180
0 2 * Q
180
'R z =
0 .2 ^
- s
--------
cs
180
° - 2 * 0
180
0 0 1
1 0 0
11
(N
O A t t
0 c
--------
180
0 .4 ^
s
--------
180
O A x
0 - s — —
L 180
0 .4 ;r
C 180 _
—0 .1 5zr —0 .1 5zr
C 180 5 180
% =
—0 .1 5zr - 0 . 1 5 *
180 C 180
0 0
0.98 0.199 0
-0.199 0.98 0
0 0 1
(0.25d)
0
0.921
-0.389
0
0.389
0.921
(0.25d)
0.989
0.194
0
-0.149 0
0.988 0
0 1
(0.25d)
''Neu ra duoc 3 ma tran xoay thi dirac 0.75d, moi ma tran xoay dirffc 0.25d.
Toa do °N, truoc khi thirc hien phep xoay
]N4 = bR X = ( % 2RX 'Rz ) °N] =
1.143
-0.736
-2.117
(0.75d)
Cau 2: (3.0 diem)
Trong he toa do toan cue OXYZ (global frame G), cho toa do diem ( K , thirc hien
phep quay 45° quay Z, ta duoc he toa do X/YiZi, sau do tiep tuc quay 45° quay X, ta
duoc he toa do X2Y2Z2. Sau do, he toa do X2Y2Z2 thirc hien phep tinh tien trong toa do
toan cue (global frame G) °d = [2 3 —1.4] ta dupe he toa do X3Y3Z3 va
2K = [-1.5 -0.6 -1 .8 ]7.
a) Tim ma tran chuyen vj dong nhat °T3 0 toa do toan cue sau khi thirc hien cac
phep xoay va tinh tiln 0 tren, tim diem °K sau khi thirc hien phep chuyen vi tir
matran GT3.
b) Tim ma tran nghich dao cua CT3.
So hieu: BM1/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu luc: 15/5/2020 Trang: 2/6
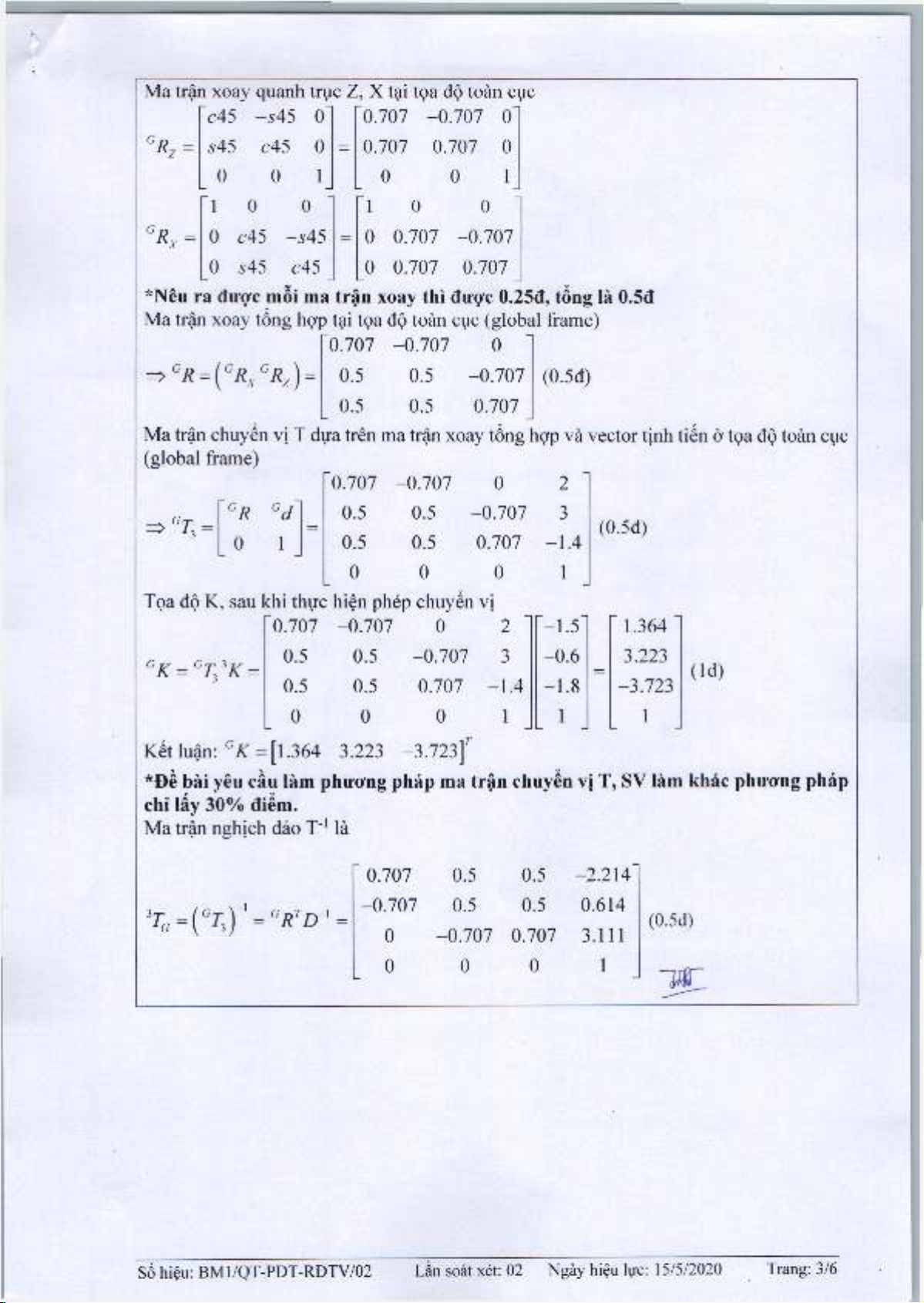
Ma tran xoay quanh true Z, X tai toa do toan cue
"c45 -545 0" "0.707 -0.707 0"
g r z = 545 c45 0 =0.707 0.707 0
0 0 1 0 0 1
'1 0 0 " 1 0 0
% = 0c45 -545 =0 0.707 -0.707
0 545 c45 0 0.707 0.707
*Neu ra duox moi ma tran xoay thi duox 0.25d, tong la 0.5d
Ma tran xoay tong hop tai toa do toan cue (global frame)
"0.707 -0.707 0
;f l = ( % c « z )= 0.5
0.5
0.5
0.5
-0.707
0.707
(0.5d)
Ma tran chuyen vi T dtra tren ma tran xoay tong hop va vector tinh tien d toa do toan cue
(global frame)
"0.707 -0.707 0 2
~gR Gd 0.5 0.5 -0.707 3
gT3 = =(0.5d)
0 1 0.5 0.5 0.707 -1.4
0 0 0 1
Toa do K, sau khi thirc hien phep chuyen vi
'0.707 -0.707 0 2 —1.5 " 1.364 "
0.5 0.5 -0.707 3 -0.6 3.223
G K = gT33X = —
j0.5 0.5 0.707 -1.4 -1.8 -3.723
0 0 0 1 1 1
Ket luan: CK = [1.364 3.223 -3.723]'
(Id)
*De bai yeu cau lam phmmg phap ma tran chuyen vi T, SV lam khac phmmg phap
chi lay 30% diem.
Ma tran nghjch dao T '1 la
gRtD '
0.707 0.5 0.5 -2.214
-0.707 0.5 0.5 0.614
0-0.707 0.707 3.111
0 0 01
(0.5d)
U T
S6 hieu: BM1/QT-PDT-RDTV/02 Lan soat xet: 02 Ngay hieu lire: 15/5/2020 Trang: 3/6







![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)