TÀI LIỆU THÍ NGHIỆM TRUYỀN ĐỘNG ĐIỆN
Bộ môn TĐH, Khoa Điện. Trang 1
PHẦN 1: HÖ TRUYÒN §éNG §IÖN §éNG C¥
MéT CHIÒU Cã §¶O CHIÒU
A. TÓM TẮT LÝ THUYẾT
1. HỆ TRUYỀN ĐỘNG ĐIỆN
Truyền động cho một máy, một dây chuyền sản xuất mà dùng năng lượng điện thì
gọi là truyền động điện (TĐĐ).
Hệ truyền động điện là một tập hợp các thiết bị như: thiết bị điện, thiết bị điện từ,
thiết bị điện tử, cơ, thủy lực phục vụ cho việc biến đổi điện năng thành cơ năng cung
cấp cho cơ cấu chấp hành trên các máy sản xuất, đồng thời có thể điều khiển dòng
năng lượng đó theo yêu cầu công nghệ của máy sản xuất.
2. HỆ TRUYỀN ĐỘNG ĐIỆN ĐỘNG CƠ MỘT CHIỀU
a. Đặc điểm chung
Truyền động điện một chiều sử dụng cho các máy có yêu cầu cao về điều chỉnh
tốc độ và mômen. Về phương diện điều chỉnh tốc độ, động cơ điện một chiều có nhiều
ưu việt hơn so với các loại động cơ khác, không những nó có khả năng điều chỉnh tốc
độ dễ dàng mà cấu trúc mạch lực, mạch điều khiển đơn giản hơn đồng thời lại đạt chất
lưọng điều chỉnh cao trong dải điều chỉnh tốc độ rộng.
b. Phương trình đặc tính cơ
Phương trình đặc tính cơ biểu thị mối quan hệ ω = f(M) của động cơ điện một
chiều kích từ độc lập như sau:
M
K
RR
K
Up
2
)(
−
−
φ
φ
ω
+
−=
Có thể biểu diễn đặc tính cơ dưới dạng khác:
ω = ω0 - ∆ω
Trong đó: ωφ
0=U
K
− gọi là tốc độ không tải lý tưởng.
M
K
RR p
2
)(
−
φ
ω
+
=∆ gọi là độ sụt tốc độ
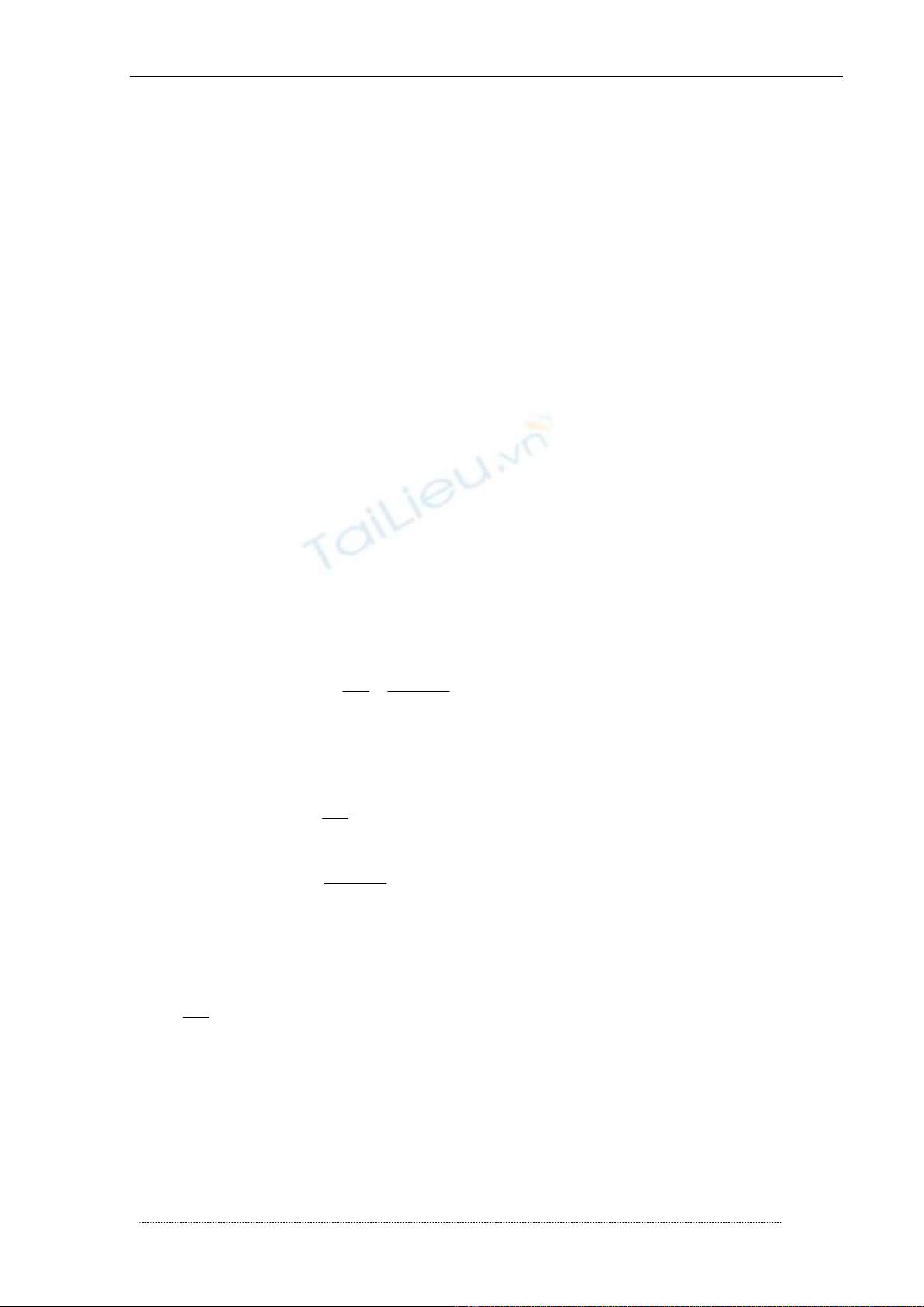
Phương trình đặc tính cơ của động cơ điện một chiều kích từ độc lập có dạng
hàm bậc nhất y = B + Ax, nên đường biểu diễn trên hệ tọa độ M0ω là một đường
thẳng với độ dốc âm. Đường đặc tính cơ cắt trục tung 0ω tại điểm có tung độ:
ωφ
0=U
K
−. Tốc độ ω0 được gọi là tốc độ không tải lý tưởng khi không có lực cản nào
cả. Đó là tốc độ lớn nhất của động cơ mà không thể đạt được ở chế độ động cơ vì
không bao giờ xảy ra trường hợp MC = 0.
Khi phụ tải tăng dần từ MC = 0 đến MC = Mđm thì tốc độ động cơ giảm dần từ ω0
đến ωđm. Điểm A(Mđm,ωđm) gọi là điểm định mức.
TÀI LIỆU THÍ NGHIỆM TRUYỀN ĐỘNG ĐIỆN
Bộ môn TĐH, Khoa Điện. Trang 2
Rõ ràng đường đặc tính cơ tự nhiên có thể vẽ được từ 2 điểm ω0 và A. Điểm cắt
của đặc tính cơ với trục hoành 0M có tung độ ω = 0 và có hoành độ suy từ phương
trình đặc tính cơ:
M = Mnm = Kφđm
−
R
Udm = Kφđm.Inm
o
M
0
ω
ω
A
ω
®m
M
®m
M
nm
c. Điều chỉnh tốc độ động cơ điện một chiều
Động cơ điện một chiều có các phương pháp điều chỉnh tốc độ:
- Điều chỉnh tốc độ bằng cách thay đổi điện áp phần ứng.
- Điều chỉnh tốc độ bằng cách thay đổi điện trở phụ mạch rôto.
- Điều chỉnh tốc độ bằng cách thay đổi từ thông kích từ.
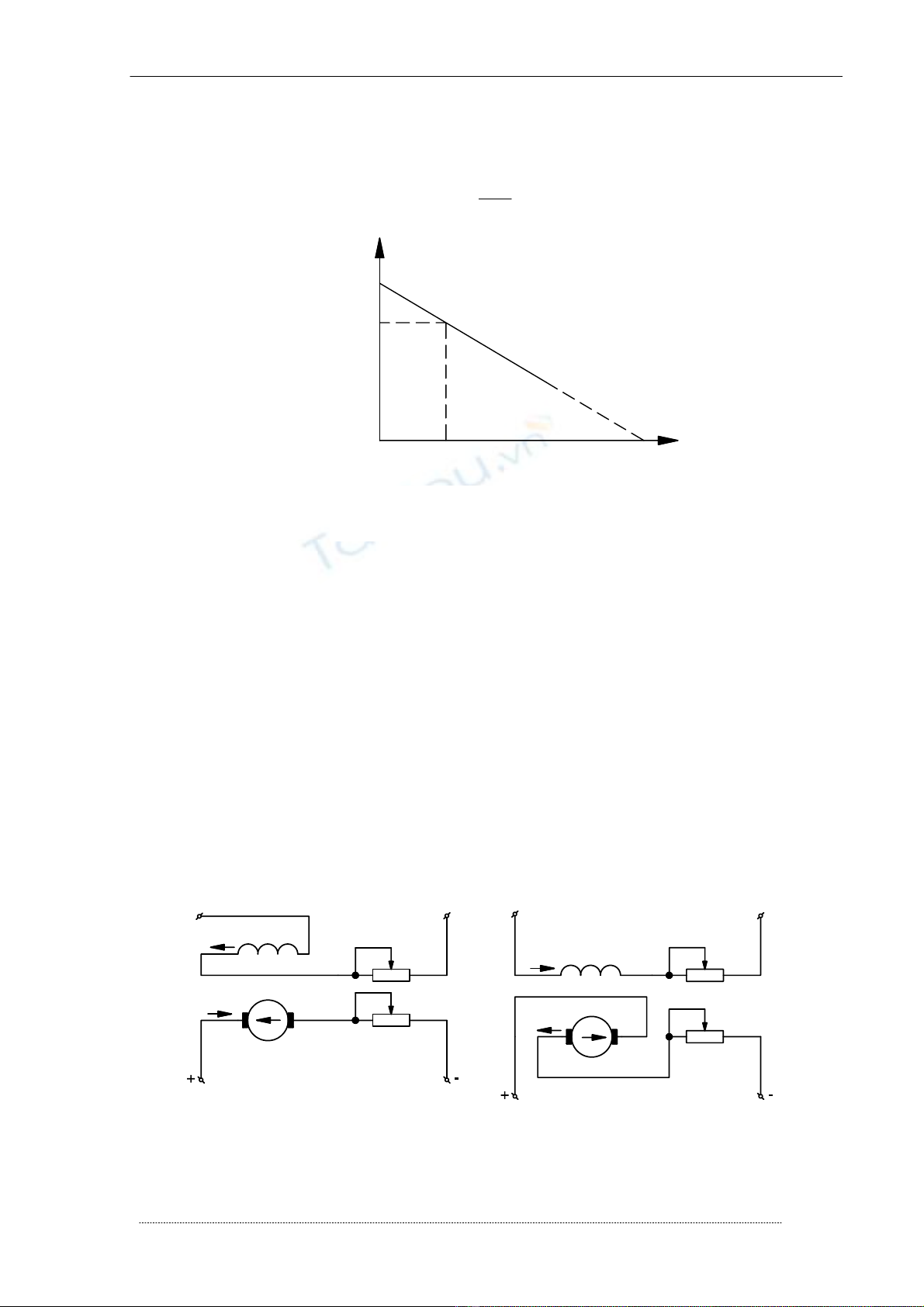
d. Đảo chiều động cơ
Chiều từ lực tác dụng vào dòng điện được xác định theo quy tắc bàn tay trái. Khi
đảo chiều từ thông hay đảo chiều dòng điện thì từ lực có chiều ngược lại. Vậy muốn
đảo chiều quay của động cơ điện một chiều ta có thể thực hiện một trong hai cách:
- Hoặc đảo chiều từ thông (bằng cách đảo chiều dòng điện kích từ).
- Hoặc đảo chiều dòng điện phần ứng.
I
I
+
u E
§
KT§
kt
Rp
Rkt
-
u
I
E
+
KT§
§
p
R
-
Rkt
Ikt
Hình 1 - Đặc tính cơ tự nhiên của động cơ
đi
ệ
n m
ộ
t chiều kích từ đ
ộ
c l
ập
Hình 2 - Sơ đồ nối dây động cơ điện một chiều kích từ độc lập khi đảo
chiều từ thôn
g
ho
ặ
c khi đảo chiều
d
òn
g
đi
ệ
n
p
hần ứn
g

TÀI LIỆU THÍ NGHIỆM TRUYỀN ĐỘNG ĐIỆN
Bộ môn TĐH, Khoa Điện. Trang 3
Đối với động cơ công suất lớn ít đảo chiều ta có thể chọn phương pháp đảo chiều
dòng điện kích từ.
Đối với động cơ công suất nhỏ ít đảo chiều có thể dùng phương pháp đổi chiều
dòng điện phần ứng bằng 2 bộ côngtắctơ thuận ngược khoá chéo.
Đối với động cơ công suất vừa và lớn có tần số đảo chiều cao thường dùng hai bộ
biến đổi nguồn đảo chiều dòng điện phần ứng.
e. Hãm điện động cơ điện một chiều
Hãm điện là trạng thái mà động cơ điện sinh ra mômen điện từ ngược với chiều
quay của rôto. Động cơ điện một chiều có 3 trạng thái hãm chính:
- Hãm tái sinh (Hãm có hoàn trả năng lượng về lưới).
- Hãm ngược.
- Hãm động năng.
Đặc điểm chung của cả 3 trạng thái hãm điện là động cơ đều làm việc ở chế độ
máy phát, biến cơ năng mà hệ TĐĐ đang có qua động cơ thành điện năng để hoặc
hoàn trả về lưới (hãm tái sinh) hoặc tiêu thụ thành dạng nhiệt trên điện trở hãm (hãm
ngược, hãm động năng). Mômen để quay động cơ ở chế độ máy phát sẽ là mômen
hãm đối với hệ TĐĐ.
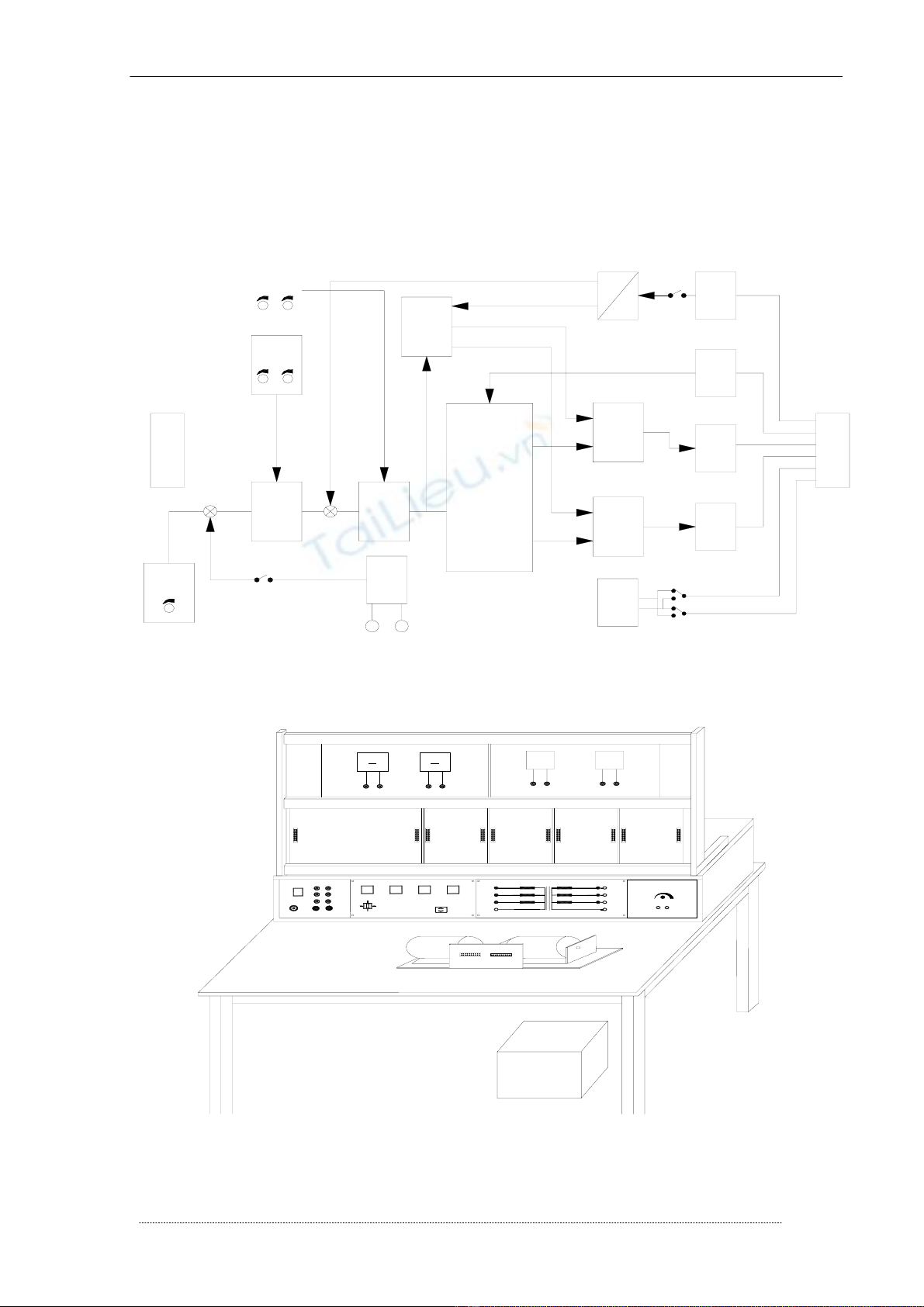
B. TÌM HIỂU BÀN THÍ NGHIỆM
Bàn thí nghiệm có kết cấu gồm các phần sau:
• Mạch nguồn động lực
• Các panel thí nghiệm 514C, panel đo lường và điều khiển.
• Thiết bị đo dòng điện, điện áp, tốc độ quay (vòng/phút), mômen, máy hiện sóng,
đồng hồ vạn năng.
• Động cơ DC và khối tạo tải: máy phát điện DC , hộp tải thuần trở.
1. Mạch động lực:
a, Nguồn cung cấp:
• Nguồn AC ba pha 380/220V có: Aptômát đóng cắt, cầu chì bảo vệ quá tải, nút
dừng (cắt nguồn) khẩn cấp (EMG).
• Chuyển mạch và Vôn kế kiểm tra điện áp dây, pha đầu vào, 3 Ampe kế đo dòng
điện sơ cấp biến áp ba pha.
• Máy biến áp hạ áp ba pha 380/220-87/50V cách ly.
• Nguồn AC 220V.
• Nguồn DC cung cấp cho mạch điều khiển.
b. Mạch công suất chỉnh lưu:
Bài thí nghiệm này chúng ta sử dụng thiết bị điều khiển động cơ điện một chiều
514C của hãng Eurother Drives. Đây là thiết bị điều khiển khá hoàn hảo, có thuật toán
điều khiển PID, cũng như các biện pháp bảo vệ, tương thích trường điện từ EMC…
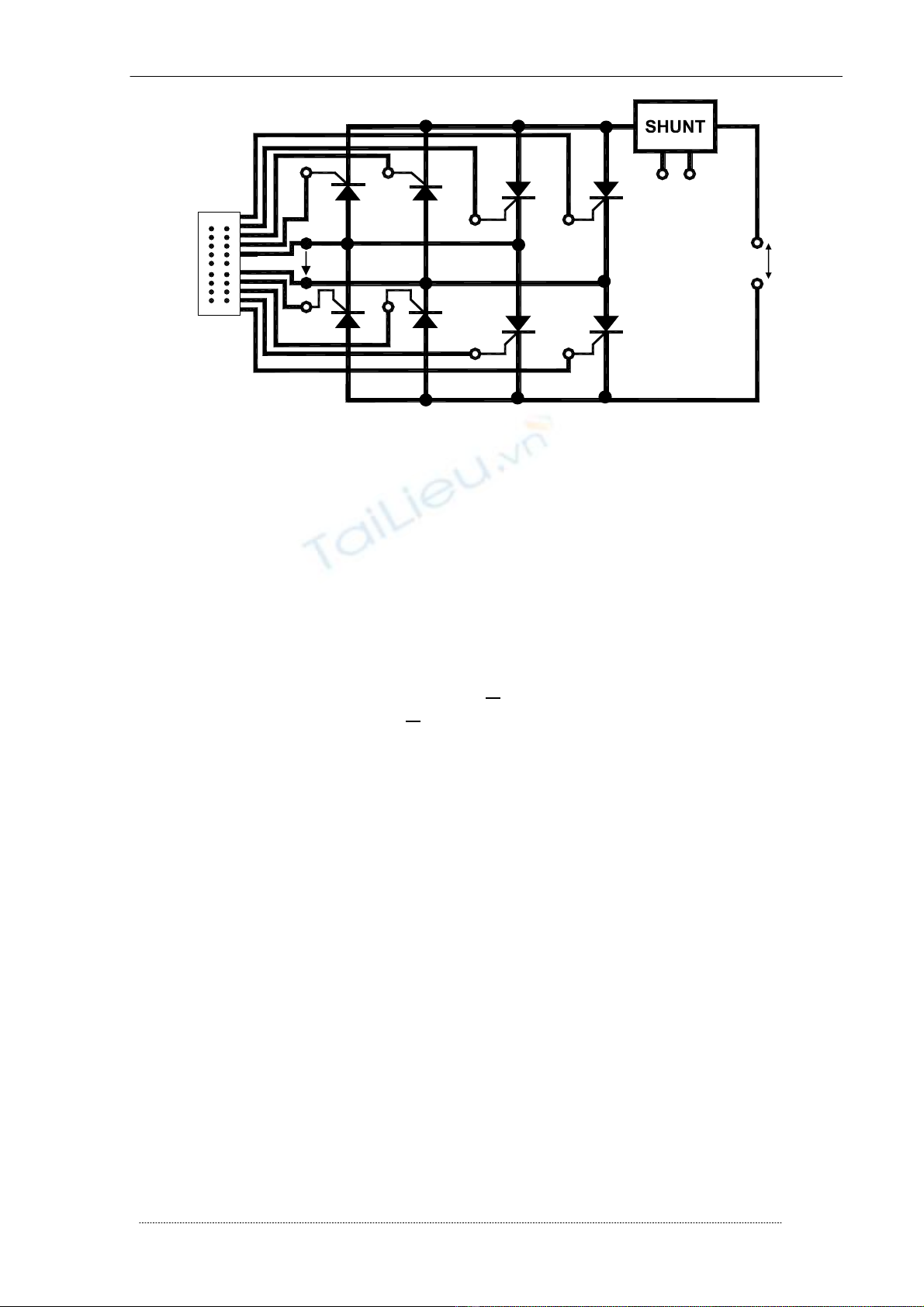
Mạch động lực điều khiển động cơ điện một chiều có đảo chiều gồm hai mạch
chỉnh lưu cầu một pha đối xứng có điều khiển (khóa chéo), nối ngược nhau như hình
3. Mạch chỉnh lưu cầu TH1…TH4 cấp nguồn cho động cơ theo chiều thuận, và mạch
chỉnh lưu cầu TH5…TH8 cấp nguồn cho động cơ theo chiều ngược. Điện áp ra định
mức: 90VDC khi đầu vào là 110/120VAC, 180VDC khi đầu vào là 220/240VAC,
320VDC khi đầu vào 380/415VAC. Dòng điện cực đại là 8A.
TÀI LIỆU THÍ NGHIỆM TRUYỀN ĐỘNG ĐIỆN
Bộ môn TĐH, Khoa Điện. Trang 4
Điện áp xoay chiều từ 110- 480V (AC) được đưa vào điểm giữa của các chỉnh lưu
cầu. Khi có tín hiệu điều khiển động cơ theo chiều thuận, ứng với nửa chu kỳ dương
của nguồn AC, khi có tải, TH1 và TH4 mở, nửa chu kỳ sau thì TH2 và TH3 mở và cứ
tiếp tục như thế làm cho điện áp trên động cơ phân cực thuận. Nguồn ngược bị khóa.
Động cơ quay theo chiều thuận.
Khi có tín hiệu điều khiển động cơ theo chiều ngược, ứng với nửa chu kỳ dương
của nguồn AC, khi có tải, TH5 và TH8 mở, nửa chu kỳ sau thì TH6 và TH7 mở và cứ
tiếp tục như thế làm cho điện áp trên động cơ phân cực ngược. Nguồn thuận bị khóa.
Động cơ quay theo chiều ngược.
Shunt 20A-75mV để nối với đồng hồ A đo dòng điện phần ứng, điện áp đặt vào
phần ứng được đo bằng đồng hồ V ,
Tốc độ quay rôto và mômen quay được đo bằng các đồng hồ tương ứng phía trên
giá panel thí nghiệm.
Điện trở RH là điện trở hãm động năng khi động cơ cắt nguồn đầu vào AC của bộ
điều khiển.
Mạch điều khiển, tầng công suất được nối với nguồn AC và tín hiệu điều khiển
thông qua phích cắm 14 chân.
2. Mạch điều khiển
Sơ đồ khối mạch điều khiển chỉnh lưu đảo chiều động cơ DC trên hình 4.
Như trên đã đề cập mạch điều khiển sử dụng thiết bị điều khiển 514C/8. Bộ điều
khiển 514C được dùng cho môi trường công nghiệp, nó cần được gắn trong hộp kín để
bảo vệ bộ điều khiển và người sử dụng. Bộ điều khiển cần được nối đất cố định.
Bộ điều khiển 514C được thiết kế để điều khiển tốc độ động cơ DC kích từ song
song hoặc nam châm vĩnh cửu. Nó sẽ đảm bảo điều khiển tốc độ động cơ ở cả 4 góc
1/4 trong quá trình hoạt động.
Bộ điều khiển 514C được thiết kế để làm việc với nguồn cung cấp chính 1pha AC
trong dải 110/220VAC tần số 50 hoặc 60Hz. Cần đến nguồn phụ như máy phát và
công tắc tơ nguồn chính
Tốc độ động cơ DC được điều chỉnh trong hệ vòng lặp kín tuyến tính lấy tín hiệu
phản hồi từ máy phát tốc hoặc điện áp phần ứng, nguồn phản hồi có thể chọn bằng
chuyển mạch.
-+
uAC uDC
H
×nh 3 - S¬ ®å nguyªn lý m¹ch c«ng suÊt chØnh l−u cÇu mét pha ®¶o chiÒu
TÀI LIỆU THÍ NGHIỆM TRUYỀN ĐỘNG ĐIỆN
Bộ môn TĐH, Khoa Điện. Trang 5
Một mạch lặp điện áp kèm theo vòng lặp tốc độ càng khẳng định rằng các mức
điều khiển dòng điện được áp dụng trong động cơ, các mức hiện tại có thể chia nhỏ
thông qua các chuyển mạch lập trình được.
Động cơ được bảo vệ bằng một mạch điện phát hiện khống chế làm việc để có thể
cắt mạch điều khiển ra khỏi động cơ trong vòng 60s.
Bộ điều khiển được bảo vệ bằng một bộ điều khiển ngắt mach nếu xảy ra quá dòng
tức thời khi ngắn mạch
em g
on off
aptomatf1
f2
f3
l1
l2
l3
220V
220V
220V
a
cm
v
220v a c
aa
khèi ®iÒu khiÓn t¶i
hép t¶i
m¸y ph¸t
Khèi ®ãng
c¾t ®Çu ra
so 4000 - 1a - vso 1008 - 1b - v
khèi c«ng
suÊt
khèi m¹ch
logic ®¶o
chiÒu vµ
h·m t¸i sinh
so 1002 - 1b - vso 6000 - 1a - v
khèi æn
®Þnh tèc
®é vµ
b¶o vÖ
khèi t¹o tÝn hiÖu ®iÒu
khiÓn vµ ®iÒu chØnh
tèc ®é
so 1005 - 1b - v
Va
so 5001 - 1a - v
®o tèc
®é
so 5001 - 1c - v
®o
momen
SO 7008 -3a - V SO 7009 -3C - V SO 7009 -3D - V SO 2005 - 1a - V
SO 8000 - 1A -V
SO 3009 - 1B - V
tèc
®é
m«
men
khèi ®Æt
tèc ®é
khèi ®iÒu
chØnh tèc
®é
khèi
®iÒuchØnh
dßng ®iÖn
®Æt "pid"
theo tèc
®é
®Æt "pid"
theo dßng
®iÖn
khèi logic
®¶o chiÒu
khèi so
s¸nh vµ t¹o
xung ®iÒu
khiÓn
khèi logic
thuËn
khèi logic
nghÞch
khèi
tacho
khèi
khuyÕch
®¹i c¸ch
ly"n"
khèi
khuyÕch
®¹i c¸ch
ly "t"
khèi ®ång
bé
khèi
®iÖn ¸p
kÝch tõ
khèi tÝn
hiÖu
dßng t¶i
pi
ip
tû lÖ
dÊu +/-
tacho
so 1005 - 1b - v
H
×nh 4 - S¬ ®å khèi m¹ch ®iÒu khiÓn chØnh l−u ®¶o chiÒu
Hình 5 - Sơ đồ bàn thí nghiệm

![Hệ thống Clutch: [Thêm từ khóa phụ/mô tả chi tiết để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151126/phatheodk/135x160/7401448475025.jpg)


![Truyền Động Bánh Răng: [Thêm từ khóa giá trị/mô tả phù hợp với nội dung]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140527/thanhmm47/135x160/1682586_066.jpg)


![Động Cơ Servo: Giới thiệu chi tiết về [Động Cơ Servo]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130410/dangquoctam/135x160/7421365530622.jpg)
![Ôtô Động Cơ Đốt Trong: Khái Quát Chung [CHƯƠNG I]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130309/09124054/135x160/1421362812210.jpg)





![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)