THIẾT KẾ VÀ CHẾ TẠO MÔ HÌNH ROBOT ĐƯỜNG ỐNG
KS.Võ Anh Huy
PGS.TS.Đặng Văn Nghìn
vahuy@dme.hcmut.edu.vn; nghindv@yahoo.com .
Bộ môn Cơ Điện Tử - Khoa Cơ Khí, Trường Đại Học Bách Khoa Thành Phố Hồ Chí Minh
TÓM TẮT
Nội dung chính của bài báo là giới thiệu một loại
robot dường ống có nhiều ứng dụng khác nhau .
Robot này bao gồm một phần di chuyển theo dọc
chiều dài ống có nhiệm vụ dẫn hướng, phần còn lại
giữ vai trò chính là tạo ra lực bám trên thành ống
bằng chuyển động của các bánh xe. Một động cơ DC
được đặt giữa những bộ phận liên kết dùng để tạo ra
sự chuyển động của robot. Tất cả các bánh xe của nó
bám sát vào mặt trong của ống và có thể thay đổi tùy
theo đường kính của ống như 180 đến 240 mm. Robot
có thể được điều khiển từ xa không dây thông qua
sóng radio, trong bài báo này dùng cách điều khiển có
dây.
ABSTRACT
The paper presents an original robot architecture for
in-pipe with multi functional. The robot consists of a
universal joint guided along the pipe by a set of
wheels moving parallel to the axis of the pipe, while
the other part is friction forced about the axis of the
pipe. A single DC motor is placed between the two
bodies to produce the motion. All the wheels are
mounted on a suspension to accommodate for
changing tube diameter and cuvers in the pipe. The
robot is autonomous and carries its own batteries and
radio link. Four different prototypes have been
constructed for pipe diameter of 180 to 240 mm,
respectively, the radio receiver may be placed on an
additional body attached to the others
1. GIỚI THIỆU
Việc khảo sát và dò tìm các khuyết tật của đường ống
kim loại chịu áp lực như ống gas, khí đốt, dầu khí
.v.v… là một nhu cầu rất cần thiết.
Tuy nhiên khi thiết kế robot đường ống này, chúng ta
thường gặp phải những khó khăn sau đây
- Cơ cấu tạo chuyển động bên trong ống
- Sự thay đổi đường kính ống.
- Hướng của ống thay đổi.
- Việc cung cấp năng lượng cho robot trong quá trình
di chuyển.
2. CẤU TRÚC CỦA HỆ THỐNG ROBOT ĐƯỜNG
ỐNG
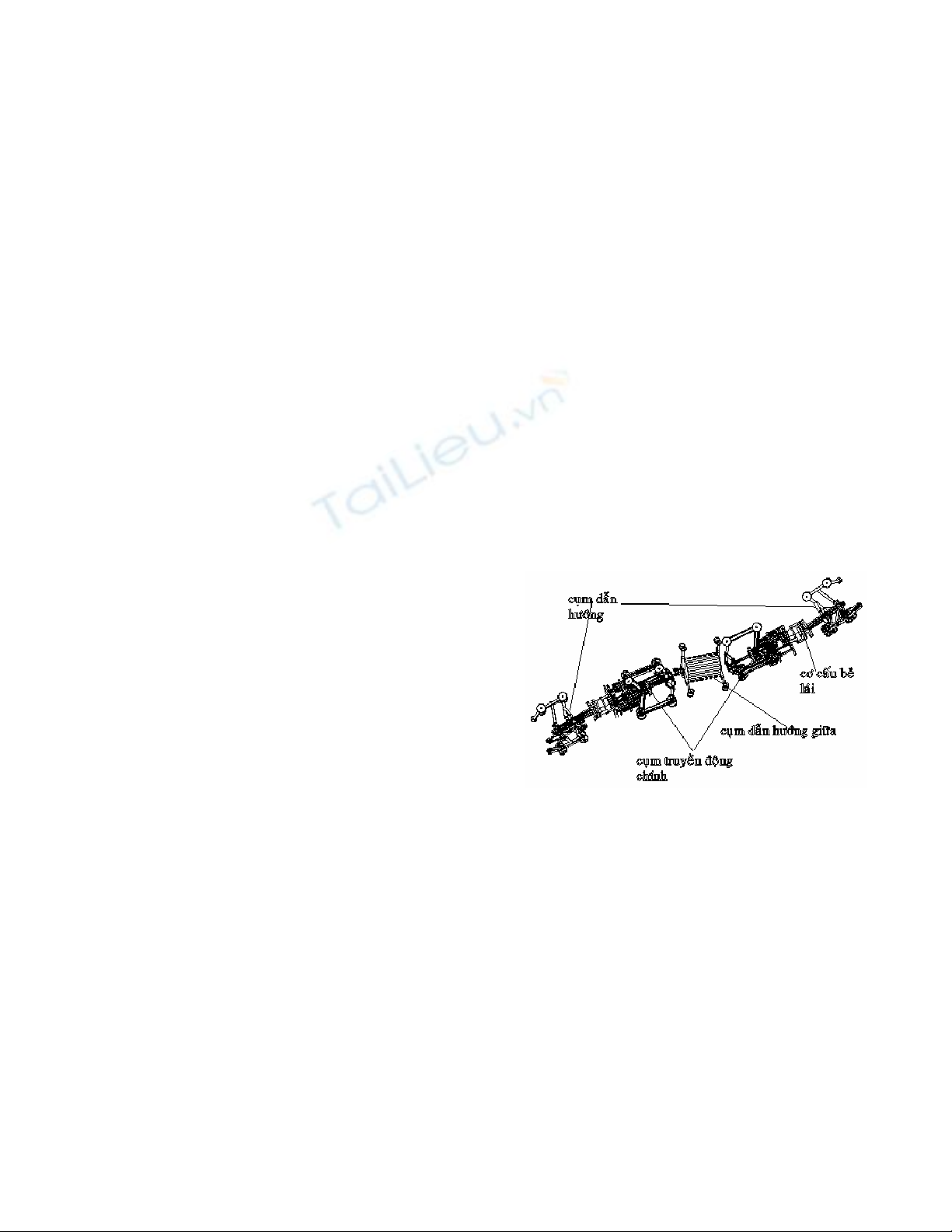
Cấu trúc của robot đường ống bao gồm năm cụm liên
kết với nhau và được miêu tả trên Hình 1, hai cụm
truyền động, một cụm nằm phía trước và một cụm
nằm phía sau. Robot có hai cụm dẫn hướng trước và
sau, cụm dẫn hướng giữa có nhiệm vụ liên kết và
tham gia dẫn hướng cho robot khi robot đi qua đọan
ống có hướng thay đổi. Robot được điều khiển bằng
máy tính nhờ sự kết hợp của hai camera bố trí trên hai
cụm dẫn hướng đầu của robot để đưa dữ liệu hình ảnh
mà nó nhận được về máy tính.
Robot được thiết kế đủ lực kéo để leo qua các đường
ống thẳng đứng đồng thời kéo theo cáp dẫn. Lực này
được cung cấp bởi hai bộ cụm truyền động nằm phía
trước và phía sau robot. Mỗi cụm có các cơ cấu bánh
xe linh hoạt áp lên thành ống, ma sát giữa bánh xe và
mặt trong ống tạo ra lực kéo để robot di chuyển.
Trong quá trình di chuyển về phía trước cụm truyền
động phía trước tạo lực kéo, cụm sau tạo lực đẩy và
ngược lại.
Hình 1 : Cấu trúc của robot đường ống robot đường
ống.
Bộ phận dẫn động và bộ phận dẫn hướng được nối lại
với nhau qua cơ cấu bẻ lái như Hình 2 . Cả hai đều
có ba cơ cấu chân bánh xe xếp cách đều 120 độ tròn
chung quanh thân chính. Ba chân bánh xe thay đổi
chiều dài đồng thời nhờ tác động từ lò xo bố trí như
Hình 2. Lò xo tác động lên cơ cấu chân bánh xe phát
sinh lực ép lên thành ống. Trên robot thiết kế, lực kéo
phát sinh từ các bánh xe và được truyền động bởi một
động cơ DC đặt trên đoạn thân sau. Momen động cơ
được cơ cấu giảm tốc trục vít truyền qua dây đai ở
chân xếp như hình 7. Đoạn thân trước không nguồn
dẫn động, chỉ có một CCD camera dùng để quan sát
và được nối với cụm dẫn động qua cơ cấu bẻ lái.
Hình 2 : cơ cấu bẻ lái nối bộ phận dẫn hướng và bộ
phận dẫn động
3. TÍNH TOÁN KÍCH THƯỚC ROBOT ĐƯỜNG
ỐNG
Trước tiên, chúng ta cần tính tóan điều kiện khi robot
đi qua một đọan ống cong (Hình 3) là trường hợp khó
nhất trong quá trình di chuyển của robot.
Hình dạng điển hình của đường ống thường là các
ống bậc, ống thẳng đứng, co, nhánh rẽ, ống giảm
vàvan như được diễn tả trên hình 3. Robot đường ống
di chuyển qua được các dạng ống bậc, di chuyển lên
và xuống các ống nghiêng nhỏ hơn 300. Những dạng
đường ống có những giới hạn về mặt kích thước hình
học nên robot đường ống cần được thiết kế thoả mãn
các giới hạn đó di chuyển qua được các đọan ống
cong. Trong những giới hạn trên, thì độ cong của
đường ống là trở ngại lớn nhất bởi vì robot sẽ gặp khó
khăn khi kích thước của nó quá to hay quá dài. Thực
tế các tiêu chuẩn về đường cong của ống phải có bán
kính lớn hơn 2/3 lần đường kính của ống. Do vậy mỗi
cụm của robot cần thoả mãn điều kiện trên để có thể
di chuyển được.
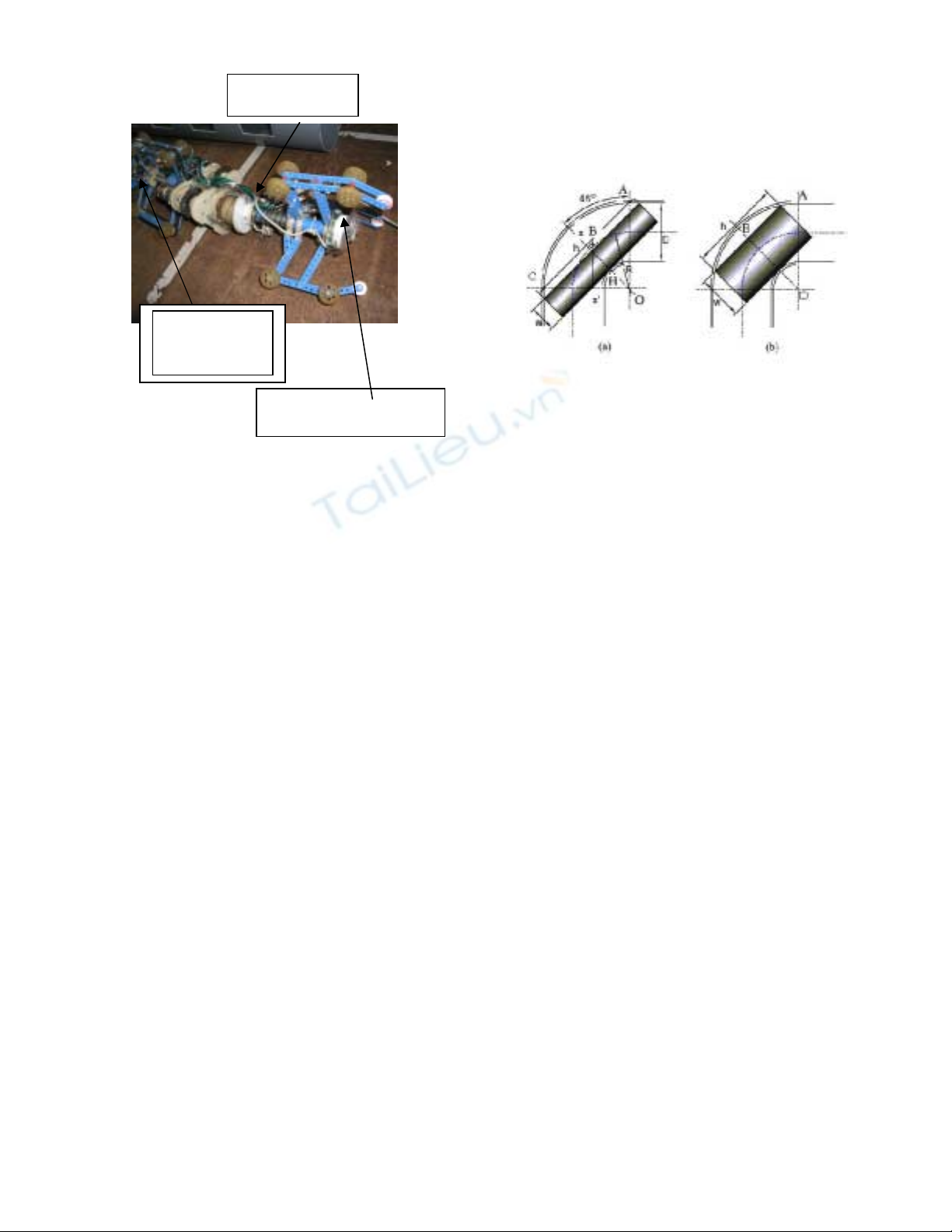
Chúng tôi sẽ minh hoạ một co vuông (900) và tính
toán kích thước cho mỗi cụm trên robot. Một cụm của
robot đường ống có thể được mô phỏng đơn giản như
là một khối trụ như hình 3. Sau đó robot có thể xem
như gồm nhiều cụm liên kết với nhau và ta có thể rút
ra mối liên hệ giữa đường kính ống, độ cong, và kích
thước của mỗi module, vị trí khó nhất của một
module là nằm nghiêng 450. Trong trường hợp này,
ta có thể xem xét 2 trường hợp:
a) Chiều rộng của cụm W nhỏ hơn chiều dài h và cà
hai đầu đều nằm ở phía ngòai đọan cong (hình 3a).
b) Cả hai đầu của module đều nằm ở phía trong đọan
cong (hình 3b).
Tùy theo trường hợp mà ta có thể rút ra các phương
trình ràng buộc quyết định kích thước của cụm và
được tính tóan như sau
Hình 3 : Cụm di chuyển qua khúc co.
Trong trường hợp a(hình 3a) chiều rộng W có ràng
buộc như sau:
0 < w < ((R+D/2)sin450 - (R - D/2)) (1)
trong đó : D là đường kính của ống, R là bán kính
cong của đọan ống.
Chiều rộng W chỉ có thể có giá trị lớn nhất là đoạn
HB (trên hình 3 a),
HB = OB - OH = ((R+D/2)sin450 - (R - D/2)) (2)
Do vậy, chiều dài tối đa của 1 cụm đựơc cho bởi:
h = 2 (D/2 + R - (R - D/2 + w)cos450) (3)
Chiều dài cụm h = 2Cx trên hình 6a ta có: Cx'= OC -
Ox'
= (D/2 + R) - (R - D/2 + w).cos450 (4) mà
Cx = .Cx'
Trong trường hợp 3b, cả hai đầu của cụm đều nằm
trong đoạn ống cong. Do vậy khỏang thay đổi của
kích thước w co mối quan hệ như sau:
((R + D/2)sin450 - (R - D/2)) < w < D (5)
Vậy chiều dài tối đa của cụm theo w:
h = 2 (6)
Các phương trình (3) và (6) đưa ra các giới hạn về
kích thước của robot đường ống tùy theo kích thước
của đoạn ống.
Robot đường ống do chúng tôi thiết kế phù hợp cho
các đường ống có kích thước đường kính thay đổi từ
180 mm đến 240 mm. Do vậy đường ống được chọn
làm mô hình có đường kính là 220mm được diễn tả
như hình 7. Mạng đường ống bao gồm các ống thẳng
nằm ngang và đứng, các co vuông 900, co T để giả
định các trường hợp có trong thực tế.
D=220mm bán kinh tại góc lượn được thiết kế có
R=D= 220mm
Xét trường hợp a) có w lớn nhất
w = ((R+D/2)sin450 - (R - D/2))
= (220+110).sin450 - (220-110)
= 123 mm
Nhận xét thấy kết cấu phù hợp nhất để có thể chế tạo
với các điều kiện kỹ thuật hiện có thì w có giá trị
khoảng 180mm trở lên.
Vậy với w trên thì ta có h thuộc trường hợp
Boä phaän daãn
ñoäng
Cô caáu beû laùi
Boä
p
haän daãn höôùn
g
b)hmax=2 = 315 mm.
Với các giá trị giới hạn w và h ta định ra kích thước
bao cho từng cụm robot.
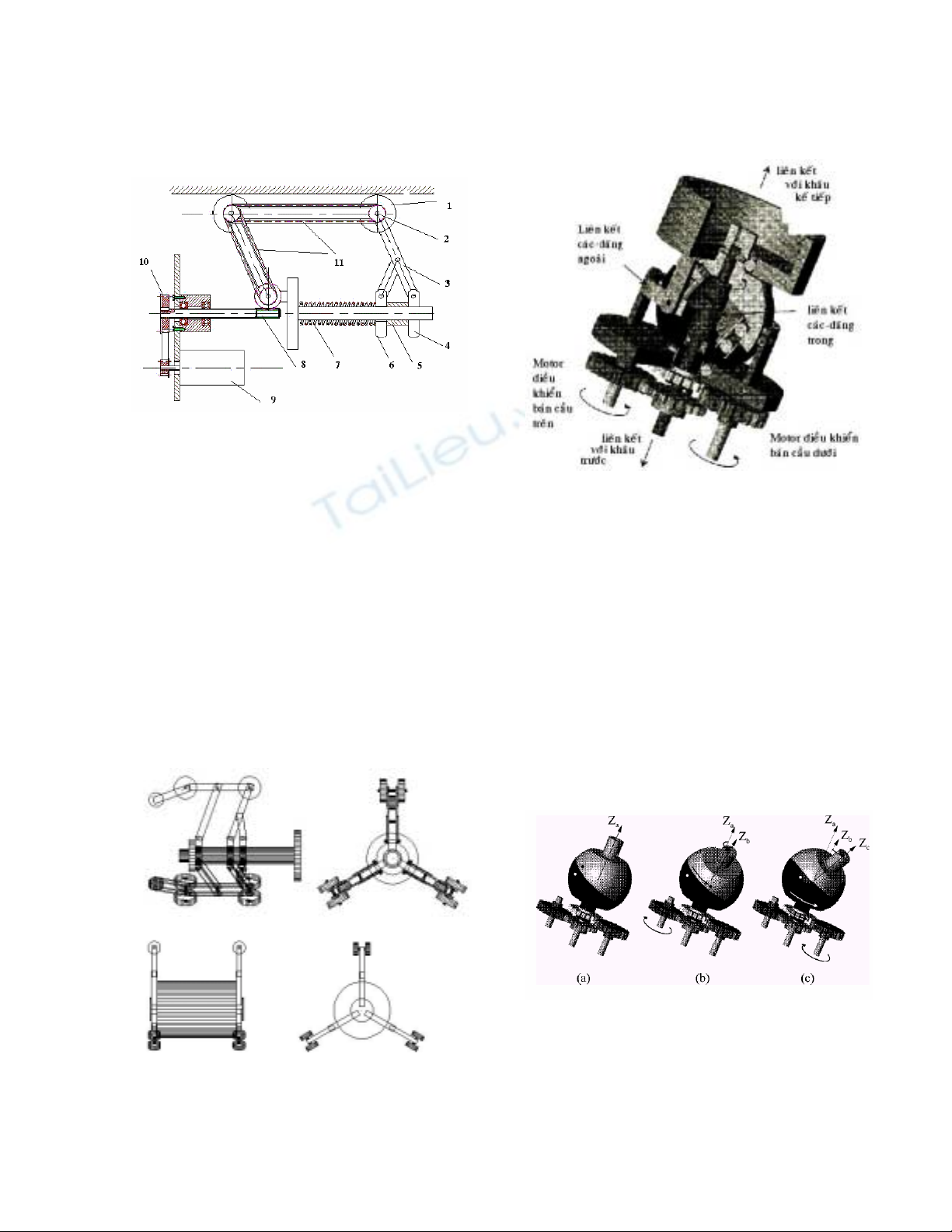
Dưới đây là hình vẽ chi tiết của một số bộ phận chính
của mô hình robot như trên hình 4, hình 5 và hình 6
Hình 4: Kết cấu cụm dẫn động
1.Bánh xe; 2.Bánh đai; 3.Khung nhôm; 4.Thân cố
định; 5. Cữ chặn; 6.Thân trượt; 7.Lò xo; 8.Trục vit-
bánh vit; 9.Động cơ truyền động; 10. Bánh đai;
11.Dây đai.
Cụm dẫn động họat động nhờ động cơ (9) và bánh
đai (10) làm quay trục vit (8) và nhờ vậy mà bộ
truyền đai răng (11) được dẫn động làm các bánh xe
chuyển động, chiều chuyển động của bánh xe có thể
chuyển động theo hai chiều thuận và nghịch tùy theo
chiều di chuyển của robot. Bánh xe(1) bám lên bề mặt
thành ống nhờ lò xo (7) giữ khung nhôm hình bình
hành (3) luôn được đẩy ra, chính vì vậy mà các bánh
xe luôn luôn bị áp sát vào bề mặt của thành ống.
Cụm dẫn hướng đầu (Hình 5) và giữa (Hình 6) có
nhiệm vụ quan trọng khi đưa robot đi qua đọan ống
cong.
Hình 5: Kết cấu đoạn dẫn hướng(cụm đầu)
Hình 6: Cụm dẫn hướng trung gian(cụm giữa)
4. TÍNH TOÁN ĐỘNG HỌC CƠ CẤU BẺ LÁI
Nguyên lý hoạt động của cơ cấu bẻ lái thể hiện trên
Hình 7
Hình 7 : Cấu trúc 3D của cơ cấu bẻ lái
Hình 7 là ảnh 3D và mặt cắt của cơ cấu bẻ lái có một
khớp nối xiên bên trong dùng điều khiển chuyển động
xoay hai bậc tự do. Nó có hai động cơ DC và cơ cấu
giảm tốc, tuần tự lái nửa cầu trên và nửa cầu dưới.
Hai nửa cầu tiếp xúc trên một mặt nghiêng một góc (
so với mặt ngang). Liên kết các-đăng bên trong
truyền moment từ động cơ đến nửa cầu trên, liên kết
bên ngoài là cơ cấu cứng chỉ dùng nối kết hai khâu,
và ngăn cản dịch chuyển tương đối giữa chúng. Khớp
nối xiên xoay quanh trục nghiêng. Lần lượt cho nửa
cầu trên và nửa cầu dưới xoay, ta thu được chuyển
động tương đối của khớp như Hình 8a, Hình 8b là
trường hợp nửa cầu trên xoay và Hình 8c diễn tả nửa
cầu dưới xoay, đây là nguyên lý làmviệc cơ bản của
cơ cấu. Chuyển động quay mong muốn được thực
hiện bằng cách phối hợp góc xoay của hai nửa cầu.
Hình 8 : Nguyên lý hoạt động cơ cấu bẻ lái
Hình 9 mô tả sơ đồ động học đơn giản hóa, với Ji và
i là khớp thứ i và góc quay của nó, li là khoảng cách
giữa hai khớp, Li là khâu thứ i. Trong cơ cấu nêu
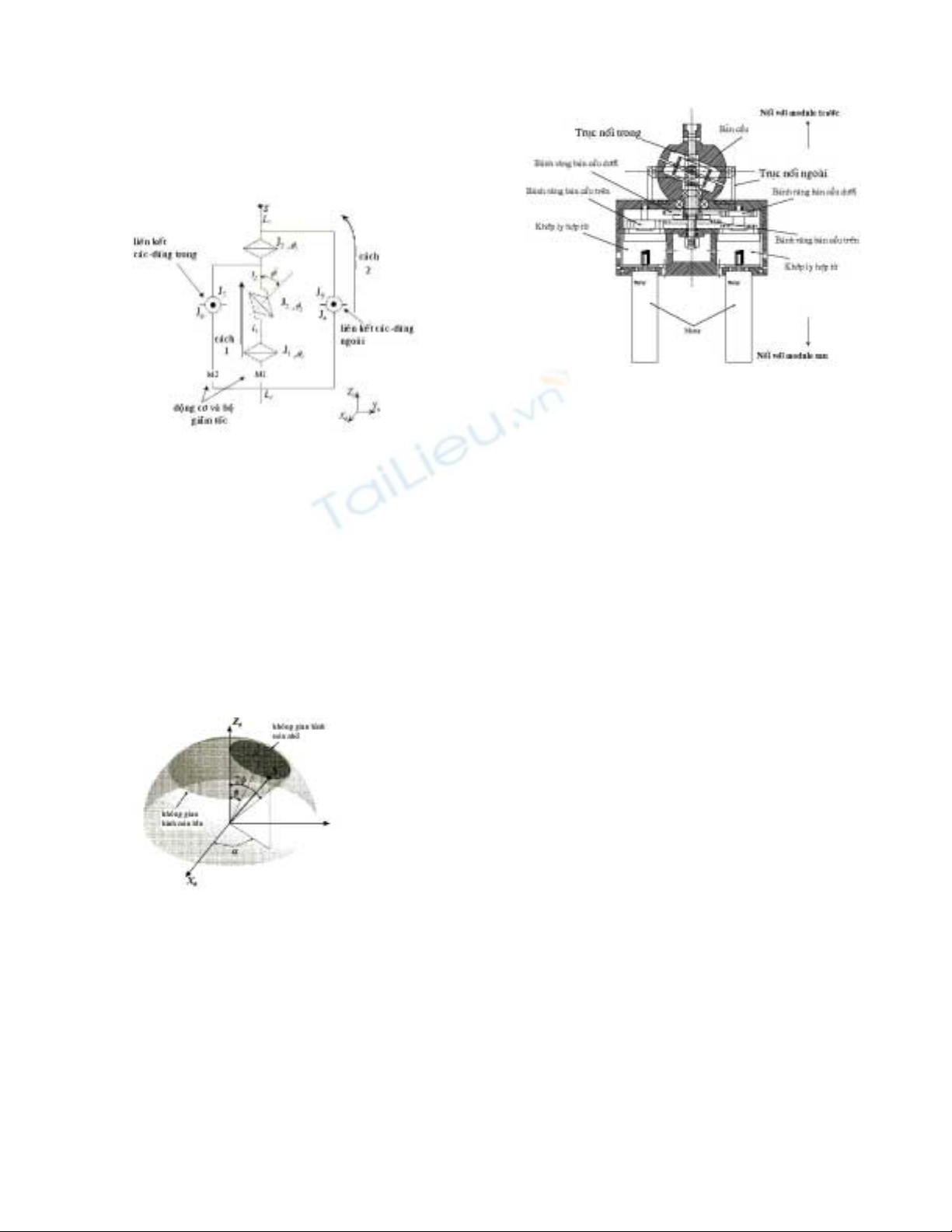
trên, khớp J1 và J3 là các khớp truyền chủ động.
Khớp các-đăng trong và ngoài được biểu diễn trên sơ
đồ lần lượt bởi các cặp khớp J4,J5 và J6,J7. Khớp J2
nghiêng và hai khớp các-đăng thụ động quanh nó
ngăn cản chuyển động xoay tương đối giữa hai khâu
L1 và L2 quanh trục dọc.
Hình 9 : Sơ đồ động học đơn giản hóa
Không gian hoạt động của cơ cấu được vẽ như Hình
11 với tâm hình cầu là tâm xoay của khớp, S là đầu
của khâu kế tiếp. Sự hình thành không gian hoạt động
tổng có thể được giải thích như sau: đầu tiên, nếu cố
định 1 và thay đổi 2, ta thu được không gian hình
nón nhỏ, thay đổi 1, ta thu được không gian hình nón
lớn. Vì vậy, không gian tổng chính là hình nón lớn
tạo thành bằng cách xoay cạnh ngoài hình nón nhỏ.
Rõ ràng không gian hoạt động của cơ cấu nhỏ hơn so
với cơ cấu 2 bậc tự do bình thường (toàn khớp bản lề)
nhưng có khả năng tạo chuyển động 2 bậc tự do
không xoay quanh trục z giống như chuyển động con
người. và lần lượt là kinh độ và vĩ độ của điểm S.
Hình10: Không gian hoạt động cầu của cơ cấu bẻ lái
Trên robot đường ống, cơ cấu bẻ lái được mô tả chi
tiết tại Hình 11 dưới đây
Hình 11 : kết cấu của cơ cấu bẻ lái.
Cơ cấu bẻ lái ở Hình 11 là một khớp nối có hai bậc
tự do, trong đó mỗi chuyển động tự do được thực hiện
nhờ một cặp chuyển động của hai motor và hai bộ ly
hợp điện từ.
Cơ cấu bẻ lái như Hình 11 có một hệ thống bánh
răng truyền động, khớp các-đăng nối trục trong và
ngoài để liên kết các bộ phận của cơ cấu lại. Nếu
không có các khớp các-đăng này, hai bán cầu luôn
quay tự do với nhau trên bạc đạn nằm nghiêng một
góc so với mặt phẳng vuông góc của các trục bánh
răng.
7. KẾT LUẬN
Robot đường ống do chúng tôi chế tạo có khả năng
làm việc trên những đoạn dường ống cong 900 và
cong dạng chữ T. Nhờ có cơ cấu lò xo trong cụm dẫn
động và cụm dẫn hướng nên các bánh xe luôn bám
lên bề mặt đường ống khá đều làm cho robot di
chuyển nhẹ và êm.
8. TÀI LIỆU THAM KHẢO
[1]Nguyễn Ngọc Cẩn. Kỹ thuật điều khiển tự động.
NXB Đại Học Quốc Gia Tp.HCM, (2000)
[2]Nguyễn Hữu Lộc. Cơ sở thiết kế máy. NXB
ĐHBK TP.HCM
[3]TS.Lê Hoài Quốc, Chung Tấn Lâm. Nhập môn
robot công nghiệp. NXB Khoa học và Kĩ thuật,
(2002)
[4]Ngô Diên Tập. Lập trình ghép nối máy tính trong
Windows. NXB Khoa học và Kĩ thuật, (1997)
[5]Trần Văn Uẩn. Bài tập cơ học lý thuyết. NXB
ĐHBK TP.HCM.
[6]Richard S.Wright JR, Michael Sweet . OpenGL
Superbible. Waite Group Press.

[7]Robert N.Bateson. Introduction to Control System
Technology. Macmilian Publishing Company, New
York, 1989
[8]www.msdn.microsoft.com/library




![Mạch nguyên lý Robot tự hành: [Hướng dẫn chi tiết/Kinh nghiệm thiết kế]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150620/anhkhoa23/135x160/3551434806006.jpg)



















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)