
XÂY DỰNG VÀ MÔ PHỎNG HỆ THỐNG CƠ ĐIỆN TỬ
CHO GHẾ NGỒI LÁI XE CÓ ĐIỀU KHIỂN CHỦ ĐỘNG
ThS. PHẠM THẾ MINH
Bộ môn Kỹ thuật máy
Khoa Cơ khí
Trường Đại học Giao thông Vận tải
Tóm tắt: Bài báo trình bày kết quả xây dựng và mô phỏng ghế ngồi lái xe có điều khiển
chủ động với mục đích nâng cao tính êm dịu tối đa cho lái xe. Đồng thời kết quả sẽ được so
sánh đánh giá với mô hình ghế ngồi có giảm chấn thông thường.
Summary: The paper presents the results of building and simulation of driving seats with
active control (active system) for the purpose of isolation the vibration and improvement the
comfort. The results will be compared to vehicle seat suspended with normal spring and
damper (passive system).
I. ĐẶT VẤN ĐỀ
Trong ô tô cũng như các phương tiện vận tải con người luôn phải chịu tác động của dao
động từ mặt đường không bằng phẳng thông qua bánh xe, trục, satxi và ghế ngồi. Các dao động
theo phương thẳng đứng có tác động đáng kể đến khả năng làm việc, tác động xấu đến sức khỏe
con người, đặc biệt là đối với lái xe trên những chặng đường dài. Vì lý do này người ta luôn tìm
cách khử các dao động của xe tác động lên lái xe. Các dao động từ ghế ngồi tác động trực tiếp
lên lái xe, nên việc khử dao động từ ghế có ý nghĩa quan trọng trong việc nâng cao tính êm dịu
của lái xe. Bằng cách lắp thêm bộ lò xo giảm chấn vào ghế ngồi lái xe (hệ bị động) sau đây sẽ
nghiên cứu xem với hệ thống như thế sẽ cải thiện được tính tiện nghi như thế nào. Đồng thời với
bộ kích truyền động điện từ (hệ chủ động) bài báo sẽ tiếp tục nghiên cứu sự cải thiện tính êm
dịu cho lái xe ra sao. Từ đó chỉ rõ được ứng dụng điển hình của hệ thống Cơ điện tử trong việc
khử dao động một cách chủ động. Để đánh giá tính êm dịu cho lái xe, ở đây sử dụng gia tốc
theo phương thẳng đứng của ghế ngồi lái xe.
CT 2
II. XÂY DỰNG MÔ HÌNH HỆ BỊ ĐỘNG
Để xây dựng mô hình trong Simulink hệ cơ được biểu diễn dưới dạng không gian trạng
thái. Không gian trạng thái cho hệ thống tuyến tính bất biến với thời gian được biểu diễn dưới
dạng:
x(t) = Ax(t) + Bu(t) (Phương trình trạng thái) (1-1)
()
(
)
(
)
tDutCxty
+
=
(Phương trình đầu ra) (1-2)
∫
D
A
B C +
+
x
&
x
uy
Hình 1. Sơ đồ khối biểu diễn không gian trạng thái của hệ thống
X(t): Véc tơ trạng thái; u(t): Véc tơ đầu vào; y(t): Véc tơ đầu ra
A: ma trận hệ thống; B: ma trận đầu vào; C: ma trận đầu ra; D: ma trận phản hồi
Hệ bị động được xây dựng trên cơ sở một hệ thống bao gồm người lái xe, ghế ngồi, xe và
nền đường.
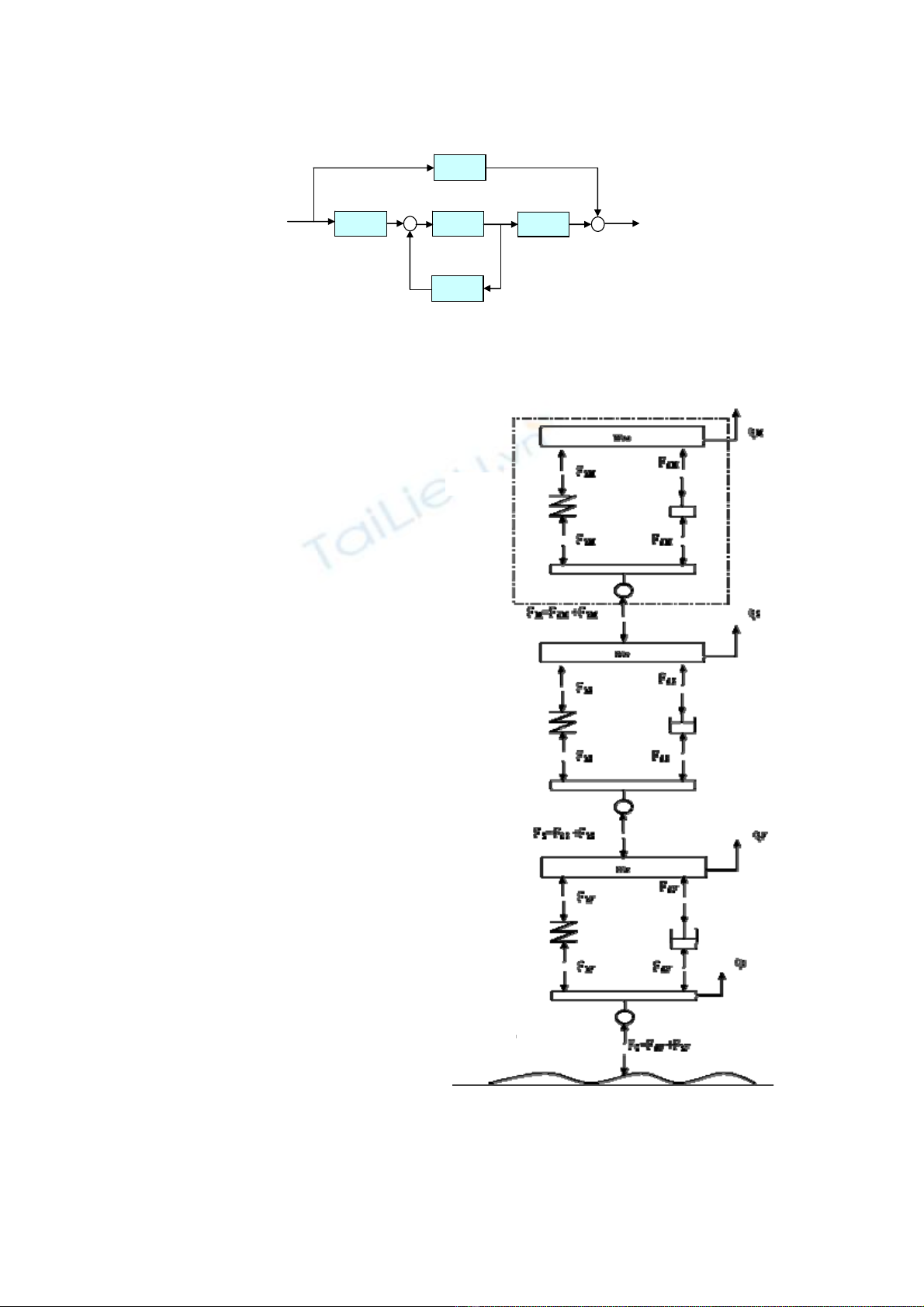
Hình 2 biểu diễn mô hình vật lý của hệ
bị động trong đó:
- Mô hình nền đường sẽ được mô
phỏng gần đúng bằng một tín hiệu dạng
hình sin.
- Mô hình xe được xây dựng đơn giản
hóa bằng mô hình ¼ xe bao gồm hệ lò xo
với độ cứng một lò xo có độ cứng kF = 16
kN/m và một giảm chấn với dF = 3500
Ns/m, một khối lượng mF = 350 kg.
CT 2
- Mô hình ghế ngồi bị động bao gồm
ghế ngồi với khối lượng ms = 28.8 kg, ks =
3925 N/m. Để tiện cho việc so sánh các ghế
bị động với các giảm chấn khác nhau ta xây
dựng ba hệ thống ứng với ba giảm chấn
khác nhau ds1 = 150 Ns/m; ds2 = 300 Ns/m;
ds3 = 450 Ns/m.
- Mô hình lái xe được xây dựng cho
người lái xe trong trạng thái vận hành bình
thường trên cơ sở mô hình MEMOSIK [1].
Mỗi mô hình thuộc hệ sẽ được xây
dựng từ phương trình cân bằng theo định
luật II Newton sau đó phương trình được
biểu diễn dưới dạng không gian trạng thái
ứng với các véc tơ và ma trận thích hợp. Kết
quả sẽ được mô phỏng trong Simulink.
Hình 3 là kết quả mô phỏng Simulink cho Hình 2. Mô hình vật lý của hệ bị động
Người
Xe
Đường
Ghế
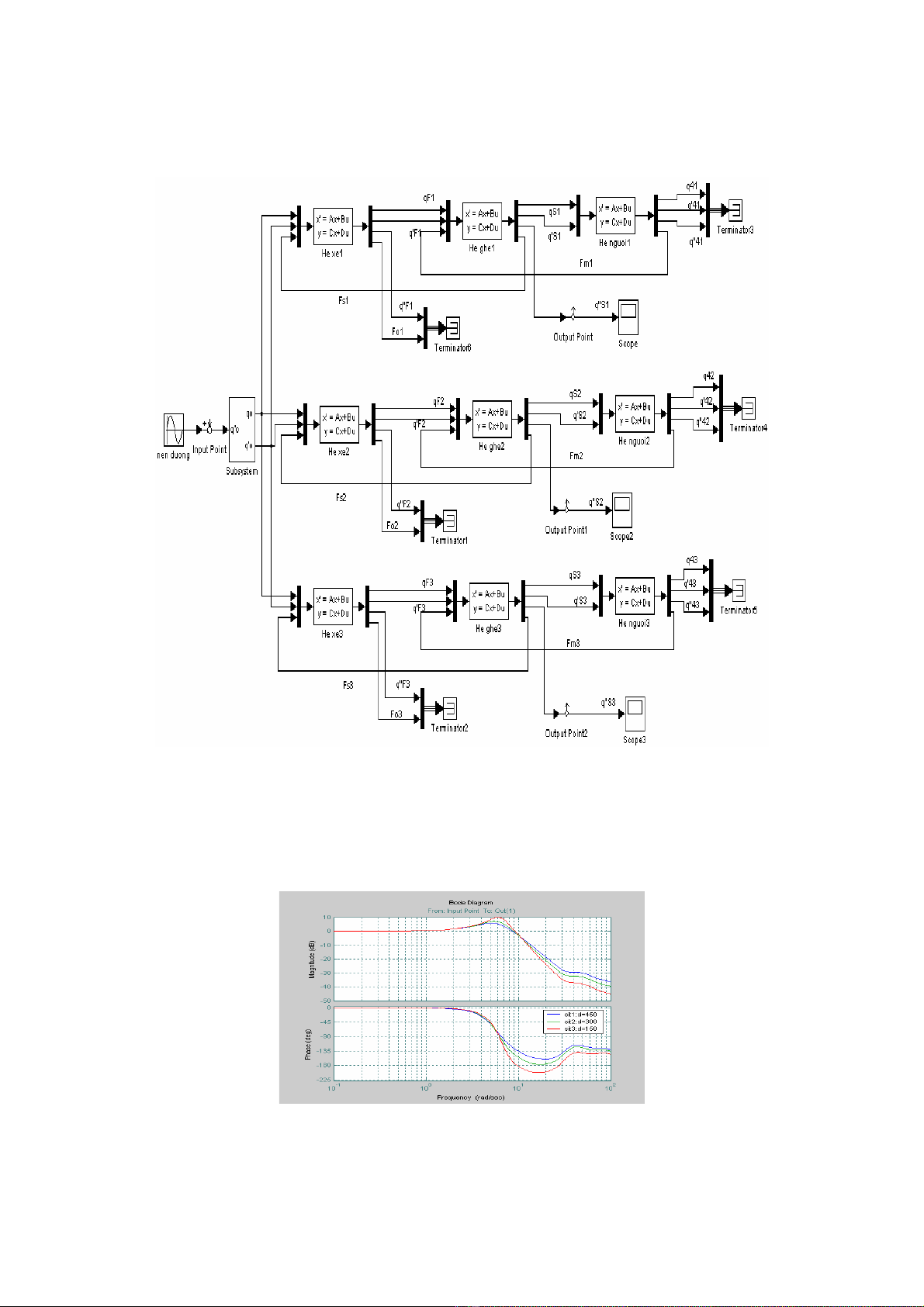
hệ bị động của ba hệ thống tương ứng với ba giảm chấn cho ghế khác nhau.
CT 2
Hình 3. Mô hình hệ bị động trong Simulink
Ta quan tâm đến giá trị hàm chuyển của từng hệ thống riêng biệt giữa gia tốc ghế ngồi và
gia tốc tác động từ nền đường. Đồ thị Bode trên hình 4 thể hiện kết quả khác nhau của ba hệ
thống tương ứng với ba giảm chấn khác nhau. Trên đồ thị thấy rất rõ, với ghế ngồi được giảm
chấn mạnh (sit 1) biên độ vùng nguy hiểm giảm rõ rệt, và ngược lại đối với ghế ngồi được giảm
chấn yếu (sit 3).
Hình 4. Đồ thị Bode của ghế bị động
III. XÂY DỰNG MÔ HÌNH HỆ CHỦ ĐỘNG
Để cải thiện tác động của dao động lên ghế ngồi, bộ kích truyền động điện từ được lắp
thêm vào mô hình của hệ bị động. Lúc này ghế ngồi chủ động bao gồm bộ kích truyền động
được lắp song song với hệ lò xo giảm chấn của ghế trong hệ bị động. Bộ kích truyền động có
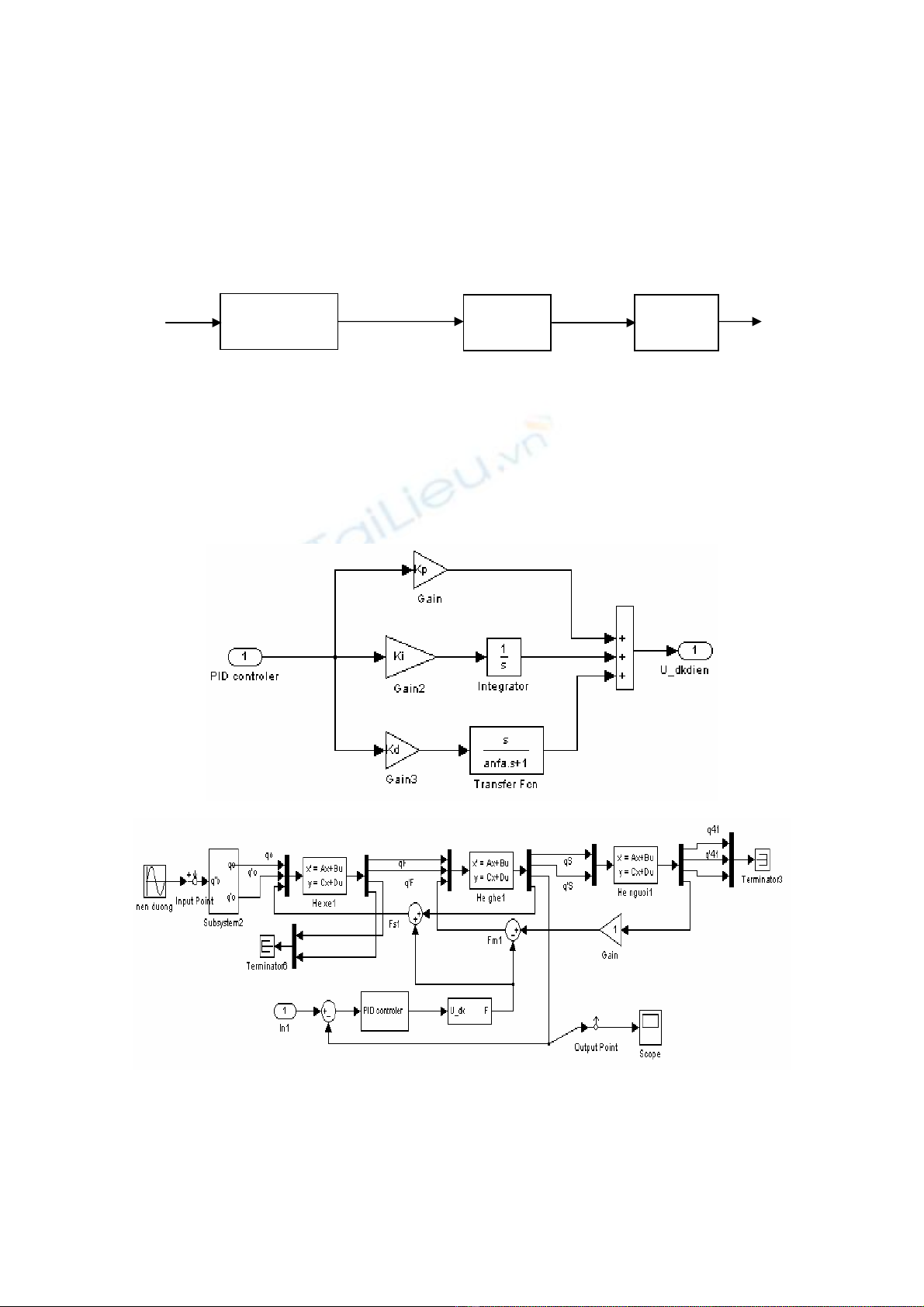
dạng sơ đồ khối được mô tả trên hình 5.
Bộ khuếch đại
Cuộn dây
Từ trường
U_dk U_khuếch đại I_cuộn dây F
Hình 5. Sơ đồ khối mô hình bộ kích truyền động
Nhờ nam châm điện vĩnh cửu trong bộ kích truyền động điện từ, một từ trường không đổi
được sinh ra trong khe hở không khí. Đặt vào cuộn dây hiệu điện thế Ucuộn, xuất hiện dòng điện
trong cuộn dây icuộn, lực Lorentz được sinh ra. Thông qua bộ điều khiển PID (hình 6) có được
dòng điều khiển cho bộ kích truyền động điện từ.
Hình 7 biểu diễn mô hình hệ chủ động trong Simulink được xây dựng trên cơ sở hệ bị động
và bổ sung thêm bộ kích truyền động điện từ có điều khiển.
CT 2
Hình 6. Mô hình bộ điều khiển PID
Hình 7. Mô hình hệ chủ động trong Simulink

Hình 8. Đồ thị Bode so sánh các hệ thống
Kết quả hàm truyền quan hệ giữa gia tốc của ghế với gia tốc tác động từ mặt đường được
thể hiện trên đồ thị Bode hình 8. Qua đồ thị biên tần này ta thấy biên độ đáp ứng của các hệ
thống ứng với giảm chấn khác nhau đều tăng lên rõ rệt trong lân cận tần số tự nhiên của hệ
thống. Hệ thống chủ động có điều khiển cho ta kết quả rất thuyết phục. So với hệ bị động biên
độ đồ thị của hệ chủ động không còn xuất hiện sự thay đổi đột ngột, đặc biệt tại lân cận tần số tự
nhiên. Điều đó cho thấy đối với hệ thống chủ động dao động được giảm thiểu một cách tối ưu,
nhằm nâng cao tính êm dịu cho lái xe thực sự hiệu quả trong quá trình vận hành.
IV. KẾT LUẬN
CT 2
Thông qua việc xây dựng và mô phỏng một hệ thống cơ điện tử điển hình áp dụng cho ghế
ngồi lái xe tác giả đưa ra được cái nhìn trực quan về ứng dụng hiệu quả của hệ thống cơ điện tử
vào việc giảm thiểu dao động chủ động. Điều đó rất có ý nghĩa đối với việc nâng cao tính êm
dịu cho người vận hành (lái xe). Bài báo trình bày kết quả nghiên cứu những nội dung sau:
- Phân tích mô hình vật lý và mô phỏng hệ thống ghế ngồi lái xe bị động, từ đó so sánh
được kết quả tác động của các giá trị giảm chấn khác nhau.
- Xây dựng và mô phỏng bài toán cơ điện tử điển hình cho hệ thống ghế ngồi lái xe chủ
động, bằng việc kết hợp hệ bị động với bộ kích truyền động điện từ có điều khiển.
- Đánh giá so sánh kết quả giữa các hệ thống trên.
Tài liệu tham khảo
[1]. Prof. Dr.-Ing. H. P. Wölfel . MEMOSIK II - Fachgebiet Maschinendynamik.
[2]. PGS. TS. Trương Hữu Trí, TS. Võ Thị Ry - NXB KHKT. Cơ điện tử - các thành phần cơ bản.
[3]. PGS. TS. Trương Hữu Trí, TS. Võ Thị Ry - NXB KHKT.Cơ điện tử trong chế tạo máy.
[4]. Prof. Dr.-Ing. R. Nordmann - SHAKER Verlag. Mechatronische Systeme im Maschinenbau I.
[5]. Nhóm tác giả - NXB ĐH Bách khoa Hà Nội. Giáo trình Lý thuyết Điều khiển tự động.
[6]. Th.S. Nguyễn Bá Nghị - BM Kỹ Thuật Máy - ĐH GTVT Giáo trình Động lực học máy.
[7]. Nguyễn Phùng Quang - NXB KHKT. Matlab & Simulink dành cho Điều khiển tự động♦


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)