1
1
Chương 4. Thực thi các bộ điều khiển số
Các thuật toán điều khiển ở dạng biến đổi z phải
được thực thi bằng máy tính với các dạng chương
trình bao gồm các phần tử trễ đơn vị, các hệ số
nhân và cộng.
Một hàm truyền ở dạng biến đổi z có thể được thực
thi bằng nhiều phương pháp khác nhau. Về mặt
toán học, các phương pháp này là tương đương chỉ
khác nhau ở cách được thực hiện. Tuy nhiên các
phương pháp khác nhau sẽ có các hệ số tính toán
2
Chương 4. Thực thi các bộ điều khiển số
khác nhau, độ nhạy khác nhau với tín hiệu sai lệch
và cách lập trình khác nhau. Chương này sẽ đề cập
đến một số phương pháp dùng để thực thi các bộ
điều khiển số như cấu trúc trực tiếp, cấu trúc song
song,...
1
2
2
3
Chương 4. Thực thi các bộ điều khiển số
4.1 Cấu trúc trực tiếp
Hàm truyền của một bộ điều khiển số có thể được
biểu diễn bởi một tỷ số của hai đa thức:
Trong đó cấu trúc trực tiếp và là các hệ số
nhân.
0
1
1
n
j
j
j
n
j
j
j
a z
U z
D z E z
b z
j
a
j
b
(4.1)
4
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
Nếu phương trình (4.1) có thể được viết lại
như sau:
0
1
b
0
0
n
j
j
j
n
j
j
j
a z
U z
D z E z
b z
(4.2)
3
4
3
5
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
Chúng ta đưa ra một biến có dạng như sau:
R z
0
0
n
j
j
j
n
j
j
j
a z
U z R z
R z E z
b z
(4.3)
6
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
hoặc (4.4)
0
n
j
j
j
U z
a z
R z
0
n
j
j
j
E z
b z
R z (4.5)
và
5
6
4
7
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
Giả thiết ta có hàm truyền của một bộ điều khiển số
có dạng như sau:
(4.6)
1
n
j
j
j
R z E z b z R z
0
n
j
j
j
U z a z R z
Phương trình (4.6) có thể viết lại như sau:
(4.7)
8
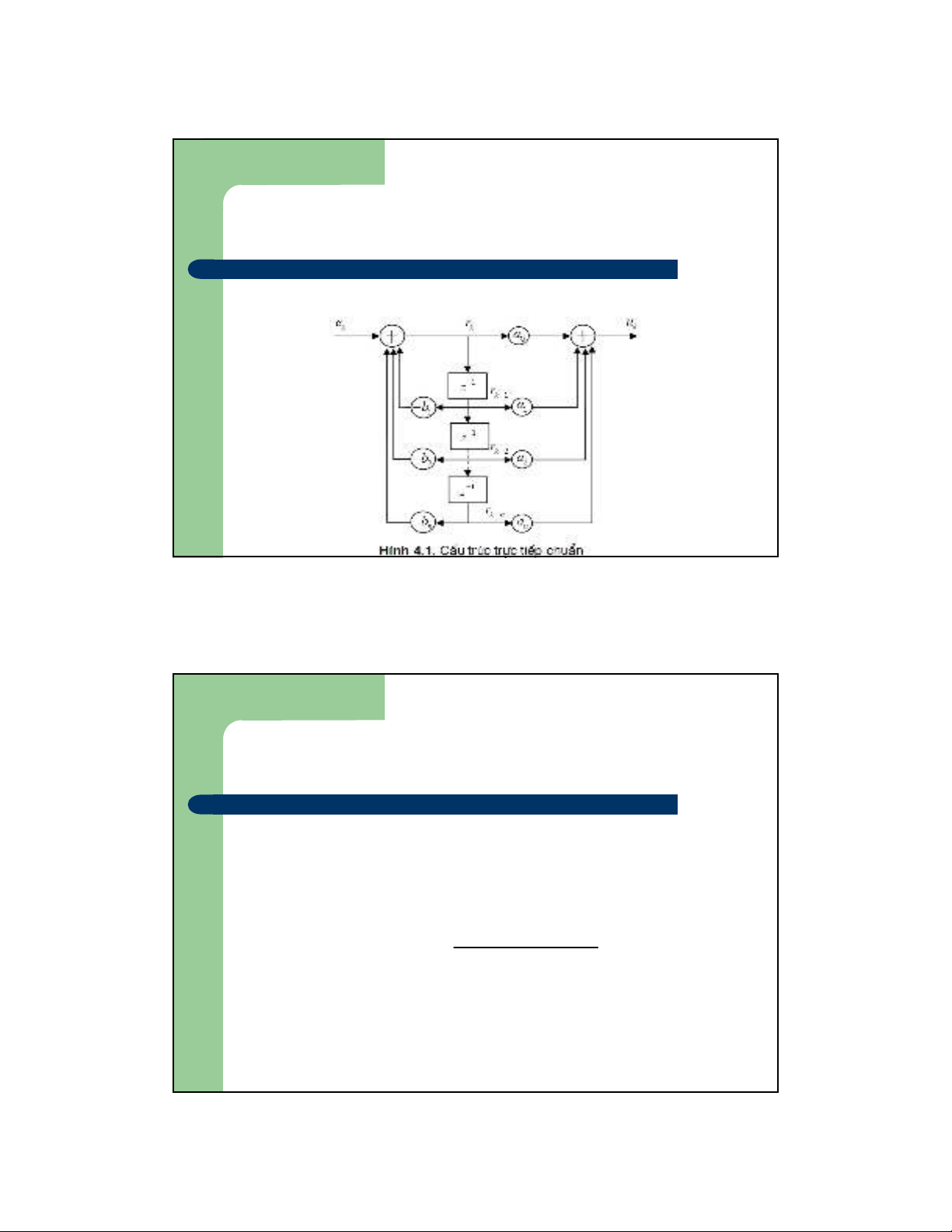
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
Phương trình (4.6) và (4.7) có thể viết trong miền
thời gian có dạng như sau:
Phương trình (4.8) và (4.9) định nghĩa dạng trực
tiếp và sơ đồ khối được thực thi như trên hình 4.1.
(4.8)
1
n
k k j k j
j
r e b r
và
1
0
n
k j k
j
u a r
(4.9)
7
8
5
9
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
10
Chương 4. Thực thi các bộ điều khiển số
4.1.1 Cấu trúc chuẩn trực tiếp
Ví dụ 4.1: Cho hàm truyền của một bộ điều khiển số
có dạng như sau:
Vẽ sơ đồ khối của bộ điều khiển theo cấu trúc
chuẩn trực tiếp.
1 2
1 2
1 2 4
1 2 5
z z
D z
z z
9
10


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)