BỘMÔN KỸTHUẬTMÁY
Trường ĐH Giao thông Vậntải
Th.s PhạmThếMinh
Tựđộng hóa quá trình sảnxuấtFMS & CIM
Chương 2 Thao tác và lắpráptựđộng linh hoạt
Chương 2 Thao tác và lắp ráp tựđộng
linh hoạt
2.1 Các loại Robot công nghiệp
2.2 Lập trình Robot công nghiệp
2.3 Tổchứchệthống lắpráp
BỘMÔN KỸTHUẬTMÁY
Trường ĐH Giao thông Vậntải
Th.s PhạmThếMinh
Tựđộng hóa quá trình sảnxuấtFMS & CIM
Chương 2 Thao tác và lắpráptựđộng linh hoạt
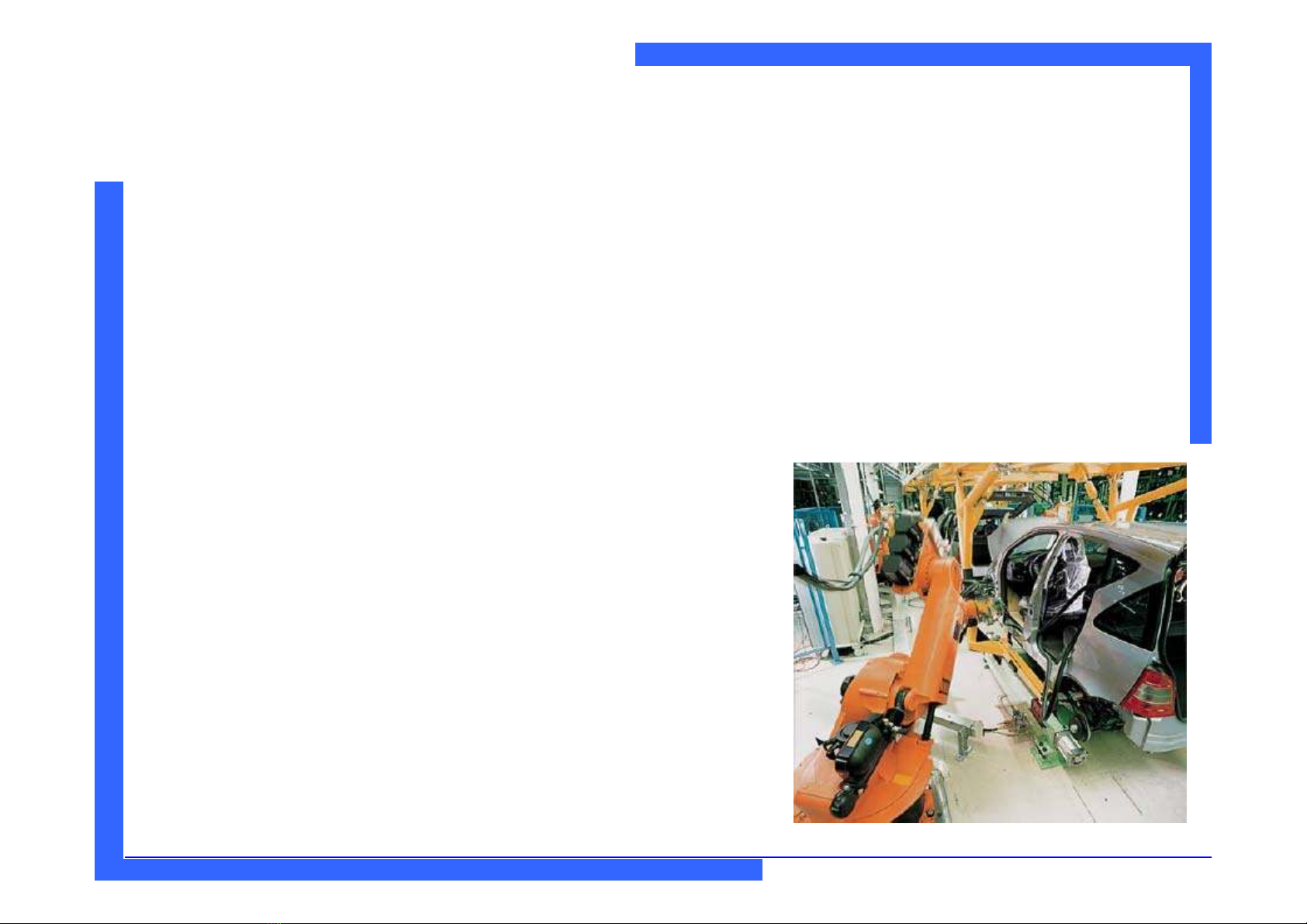
Lý do sửdụng Robot công nghiệp
1. Con người hóa cho công việc
(Nóng, tiếng ồn, độchại, nặng nhọc…)
2. Giảm chi phí
(Giảmgiásảnphẩmmặcdùtăng giá cốđịnh)
3. Cảithiệnchấtlượng
(Nâng cao chấtlượng, tái sảnxuất, khảnăng
dây chuyền)
4. Tăng năng suất
(Yêu cầu cao, thịtrường lớn, chi phí cốđịnh)
5. Kéo dài thờigianchạymáy
(Nghỉ, 2/3 ca, vậnhànhítphảiđể ý)
BỘMÔN KỸTHUẬTMÁY
Trường ĐH Giao thông Vậntải
Th.s PhạmThếMinh
Tựđộng hóa quá trình sảnxuấtFMS & CIM
Chương 2 Thao tác và lắpráptựđộng linh hoạt
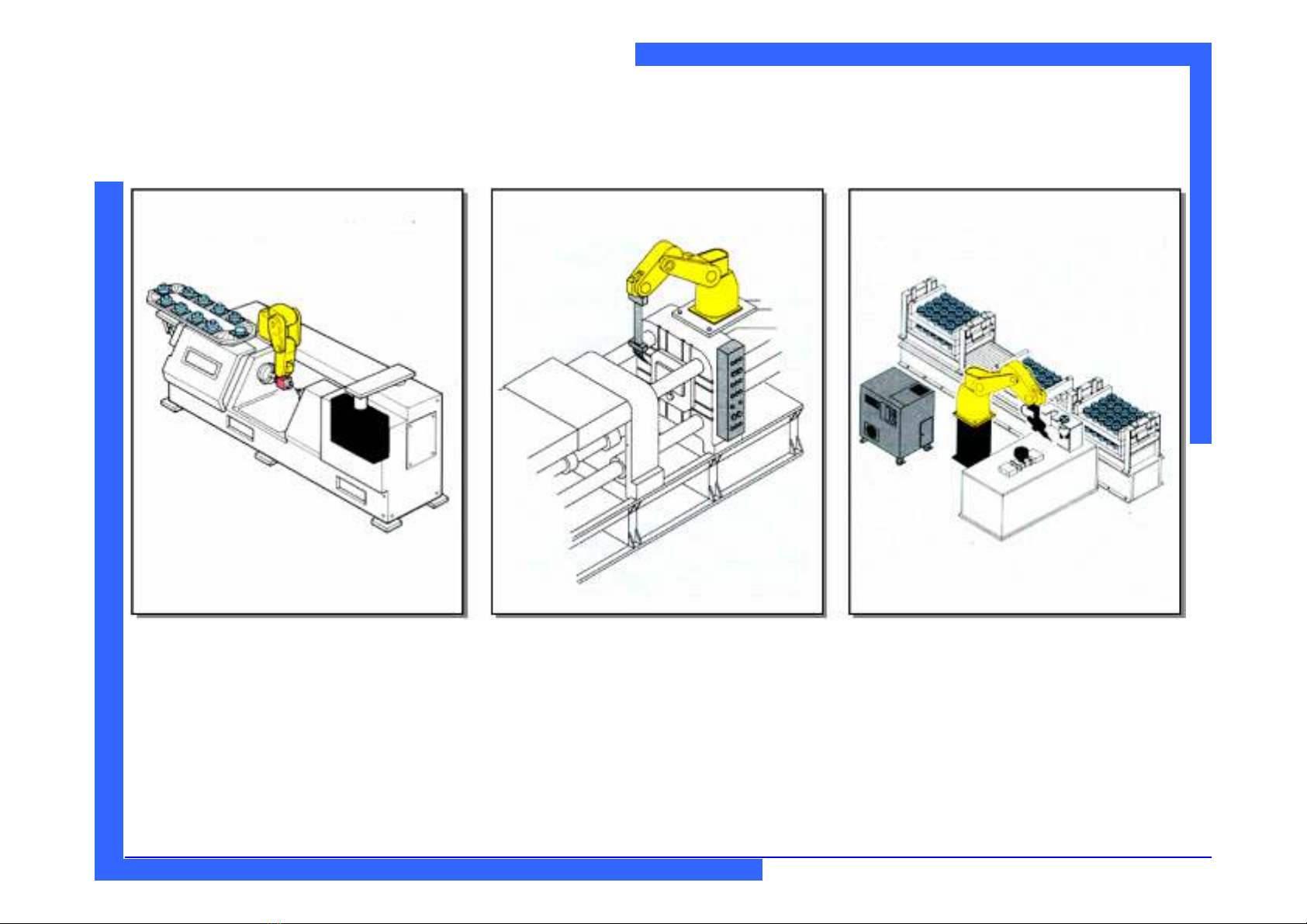
Ví dụRobot trong các thiếtbịgia công
Tay máy trong trung
tâm máy tiệnPhun chấtngăncách
trong máy dập
Tháo lấythiếtbị

BỘMÔN KỸTHUẬTMÁY
Trường ĐH Giao thông Vậntải
Th.s PhạmThếMinh
Tựđộng hóa quá trình sảnxuấtFMS & CIM
Chương 2 Thao tác và lắpráptựđộng linh hoạt
Các bộphậncủa Robot công nghiệp
•Động học
•Nguồnvậnhành
•Hệthống đo đường đi
•Hiệuứng kết thúc
•Cảmbiến
•Điềukhiển
•Lậptrình
•Thiếtbịan toàn
•Chiếm phôi
BỘMÔN KỸTHUẬTMÁY
Trường ĐH Giao thông Vậntải
Th.s PhạmThếMinh
Tựđộng hóa quá trình sảnxuấtFMS & CIM
Chương 2 Thao tác và lắpráptựđộng linh hoạt
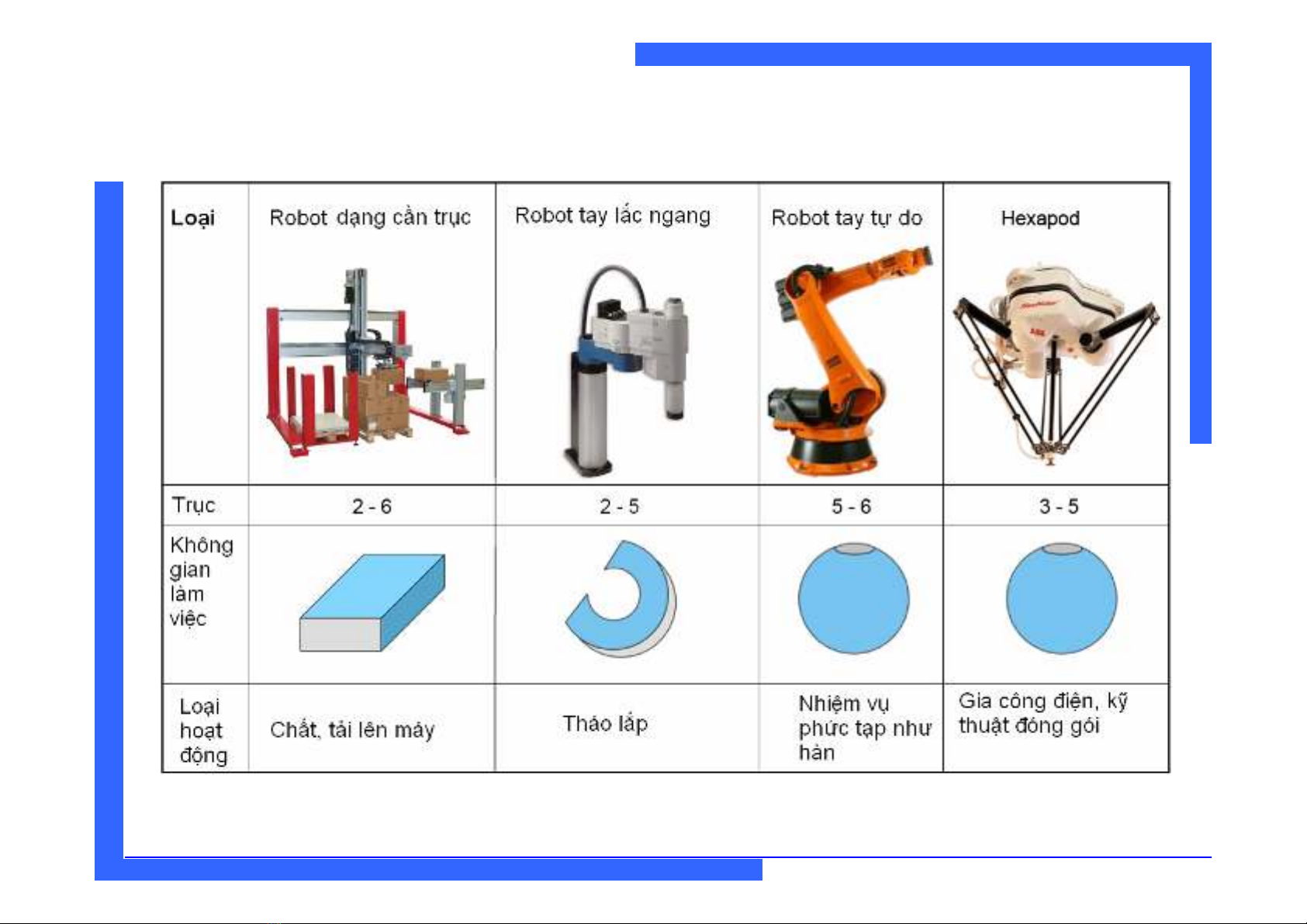
Mộtsốloại Robot lắpráp










![Đề cương đề tài nghiên cứu khoa học [chuẩn nhất/mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/duong297/135x160/26111763433948.jpg)













