Chương II: Điều chỉnh tốc độ động cơ điện một chiều
13
Chương II:
ĐIỀU CHỈNH TỐC ĐỘ ĐỘNG CƠ ĐIỆN MỘT CHIỀU
2-1 : Đặc tính cơ của động cơ điện 1 chiều (ĐM)
2-1-1 :Phương trình đặc tính cơ:
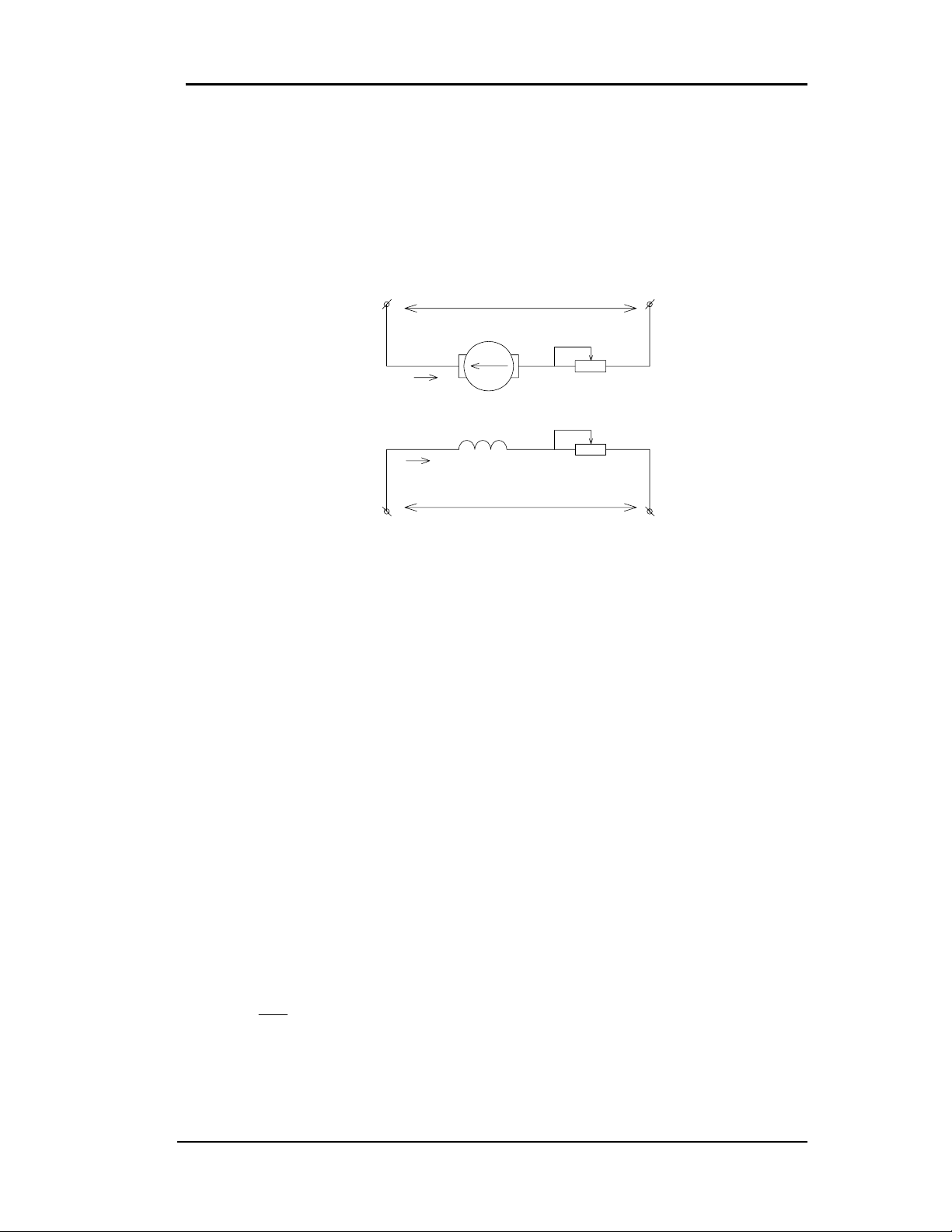
Hình 2-1: Sơ đồ nối dây của động cơ điện một chiều kích từ độc lập
CKĐ : cuộn dây kích từ (Ω).
U
ư : dòng điện đưa vào động cơ (V).
I
ư : dòng điện phần ứng (A).
E : S . đ . đ (V).
R
ư : điện trở dây quấn phần ứng (Ω).
R
f : điện trở phụ: (Ω).
Theo sơ đồ hình 2-1 ta viết được phương trình cân bằng điện áp phần
ứng có dạng:
U
ư = E +Iư ( Rư + Rf).
Sức điện động Eư của phần ứng của động cơ được xác định theo biểu
thức:
E
ư = a
PN
π
2
φ
ω = K
φ
ω.
Trong đó: P : là số đôi cực từ chính.
R
¦
E
U
¦
IRf
Ikt Rkt
Ukt
CK§
+
Chương II: Điều chỉnh tốc độ động cơ điện một chiều
14
N : số thanh dẫn tác dụng của cuộn dây phần ứng.
a : số đối mạch nhánh song song của cuộn dây phần ứng.
φ
: từ thông dưới một cực từ.
ω : tốc độ góc Rad/s.
K = a
PN
π
2 hệ số cấu tạo của động cơ.
Nếu biểu diễn sức điện động theo tốc độ quay n (vòng / phút).
Ta có: Eư = Ke
φ
n.
ω = 60
2n
π
= 55,9
n
vì vậy Eư = a
PN
60 Φn.
Trong đó Ke = a
PN
60 : hệ số sức điện động của động cơ:
K
e = 55,9
K≈ 0,105 K.
Từ phương trình cân bằng điện áp phần ứng động cơ ta kết hợp với biểu
thức xác định. Sức điện động EƯ của phần ứng động cơ ta được phương
trình đặc tính cơ của động cơ một chiều như sau:
ω =
φ
K
Uu -
φ
K
RfRu +.Iư
Đây cũng là phương trình quan hệ giữa tốc độ (ω) và dòng điện. Phần
ứng của động cơ (Iư) hay là phương trình tốc độ.
Mặt khác mô men điện từ Mđt gồm mômen cơ học và mô men ma sát:
M
đt = K
φ
Iư.
M
đt = M + ΔM
Trong đó: ΔM là lực ma sát.
Giả thiết nếu bỏ qua ΔM
≈
0 thì M= Mđt.
Chương II: Điều chỉnh tốc độ động cơ điện một chiều
15
Suy ra: Iư =
φ
K
M
Thay Iư vào phương trình đặc tính cơ điện ta được phương trình đặc tính
cơ như sau:
ω =
φ
K
Uu - 2
)(
φ
K
RfRu +.M
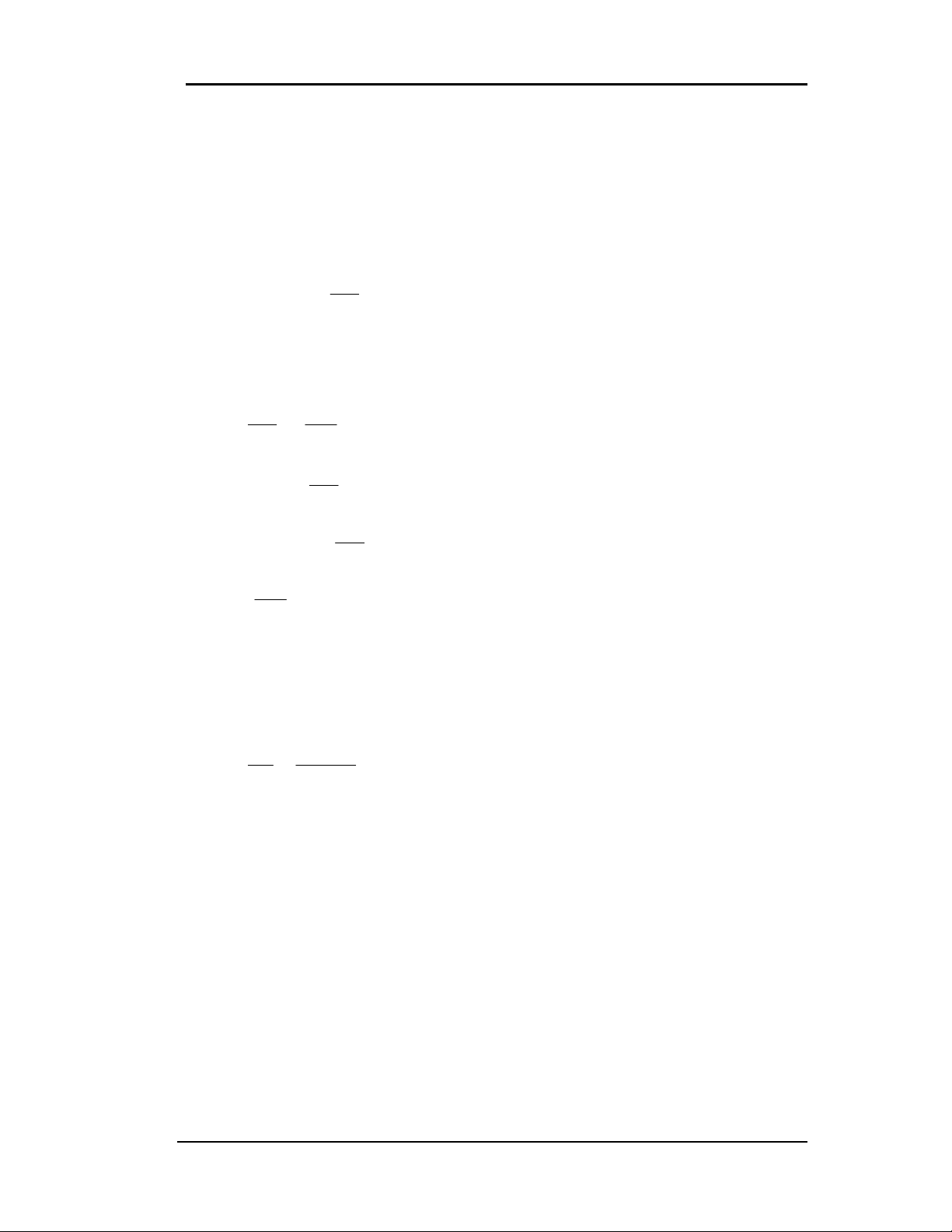
Giả thiết phản ứng phần ứng được bù đử, từ thông
φ
= const thì phương
trình đặc tính cơ điện và phương trình đặc tính cơ là phương trình tuyến
tính. Hình 2-2 và hình 2-3 là đặc tính của chúng.
Hình2-2: đặc tính cơ của động cơ Hình2-3: đặc tính cơ của
điện một chiều kích từ độc lập. động cơ điện kích từ độc lập.
Theo đồ thị trên thì khi Iư = 0 hoặc M = 0 ta có :
φ
K
Uu = ω0
ω0 được gọi là tốc độ không tải lý tưởng khi ω = 0 ta có:
I
ư = RfRu
U
+= Imn
M= K
φ
Imn = Mmn
I
mn, Mmn được gọi là dòng điện ngắn mạch và mô men ngắn mạch.
ωđm
ω0
ω
Iđm
Im
I
ωđm
ω0
ω
Mđm
Mmn
I
Chương II: Điều chỉnh tốc độ động cơ điện một chiều
16
2-1-2: Xét ảnh hưởng của các tham số đến đặc tính cơ điện một chiều.
a) Ảnh hưởng của điện trở phần ứng.
Giả sử : Uư = Uđm = const và
φ
=
φ
đ = const muốn thay đổi điện trở phần
ứng ta nối thêm điện trở phụ Rf vào mạch phần ứng.
Tốc độ không tải lý tưởng là.
ω0 =
dm
dm
K
U
φ
= const
độ tính đặc tính cơ.
β
=
ω
Δ
ΔM = RfRu
Kdm
+
φ
=var
Khi Rf càng lớn,
β
càng nhỏ nghĩa là đường đặc tính cơ càng dốc. ứng
với Rf = 0 ta có đặc tính cơ tự nhiên.
β
TN =- 2
)( Ru
dmK
φ
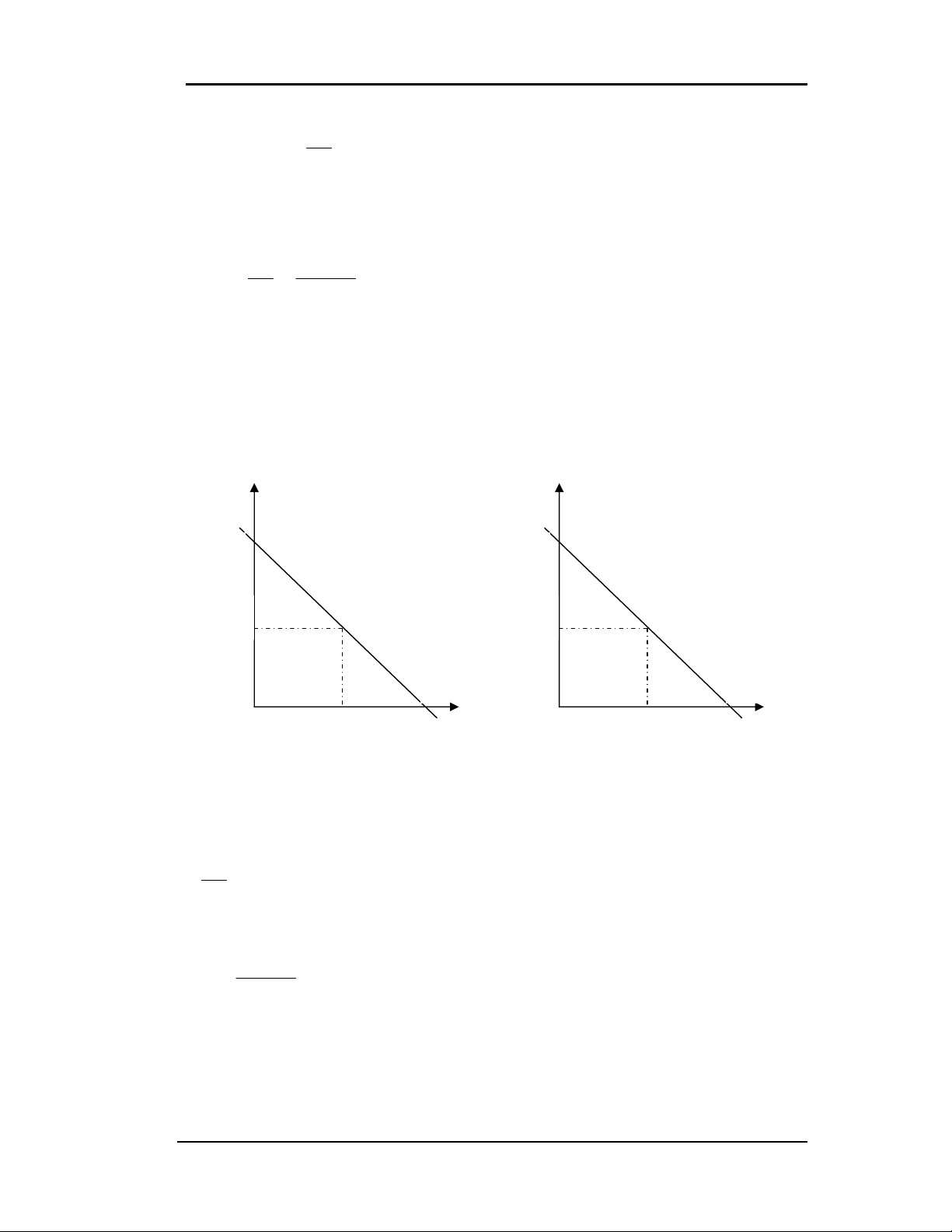
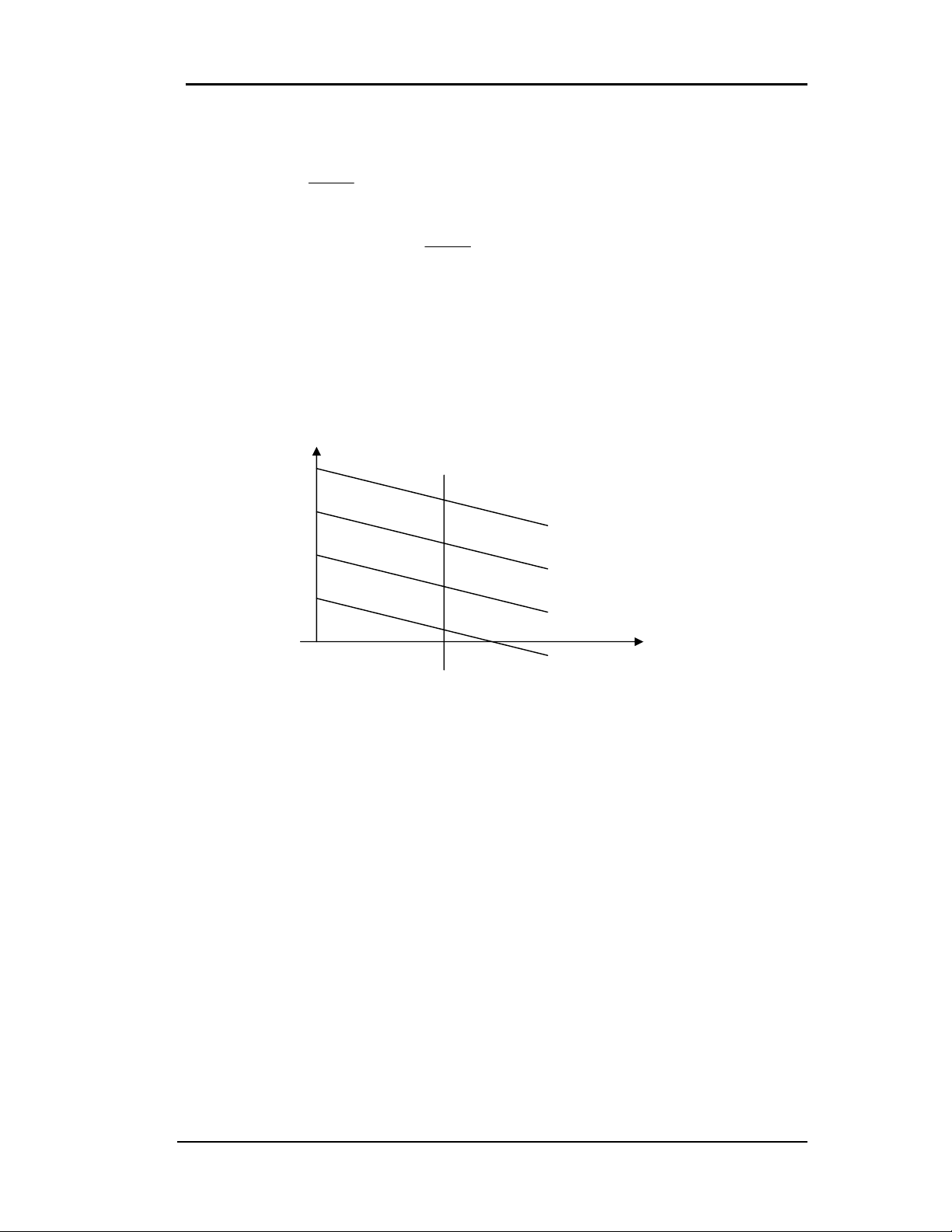
Hình 2-4 các đặc tính cơ của
động cơ 1 chiều kích từ
độc lập khi thay đổi
điện trở phụ mạch phần ứng.
(Rf3 > Rf2 > Rf1)
Như vậy khi thay đổi điện trở phụ Rf ta được một họ đặc tính cơ biến trở.
ứng với một phụ tải Mc nào đó, nếu Mc càng lớn thì tốc độ động cơ càng
giảm. Người ta thường sử dụng phương pháp này để hạn chế dòng điện và
điều chỉnh tốc độ động cơ phía dưới tốc độ cơ bản.
b) ảnh hưởng của điện áp phần ứng.
Giả sử khi từ thông
φ
=
φ
đm = const.
TN
Rf1
Rf2
Rf3
MC M
ω
0
Chương II: Điều chỉnh tốc độ động cơ điện một chiều
17
Khi thay đổi điện áp theo hướng giảm so với Uđm ta có tốc độ không tải
lý tưởng: ω0 = dmK
U
φ
= var
Độ cứng của đặc tính cơ:Ru
K2
)(
φ
β
= const
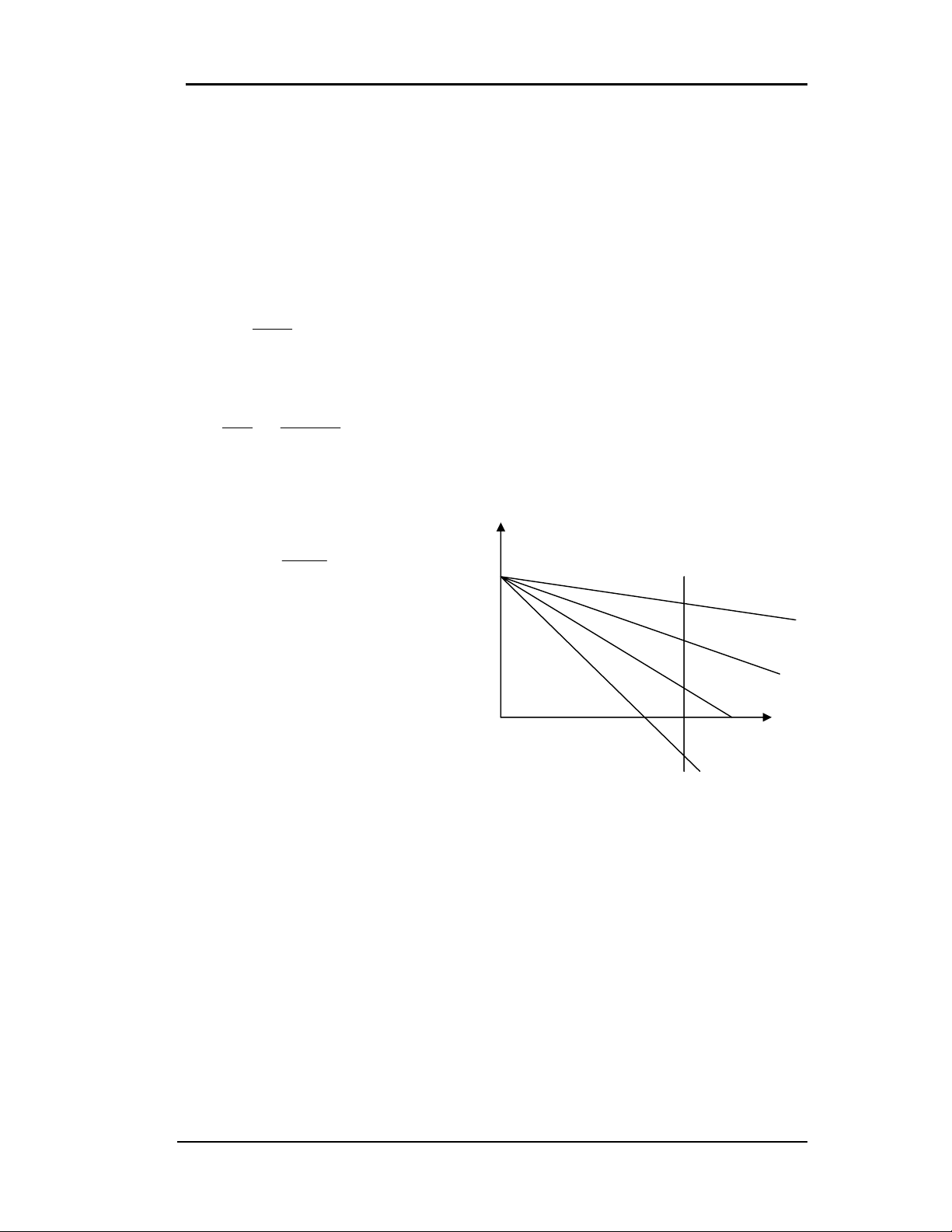
Như vậy khi thay đổi điện áp đặt vào phần ứng động cơ ta được một họ
đường đặc tính cơ song song với đường đặc tính cơ tự nhiên. Như hình vẽ
2-5 ta thấy rằng:
ω0 32
1
ω
ω
ω
≠≠≠
Hình 2-5: các đặc tính cơ của động cơ 1 chiều kích từ độc lập
khi giảm điện áp đặt vào phần ứng động cơ (U3<U2 <U1 <Uđm).
Khi thay đổi điện áp (giảm áp ) thì mô men ngắn mạch, dòng điện ngắn
mạch của động cơ giảm và tốc độ động cơ cũng giảm ứng với phụ tải nhất
định. Dó đó phương pháp này cũng được sử dụng để điều chỉnh tốc độ
động cơ và hạn chế dòng điện khi khởi động.
c) ảnh hưởng của từ thông:
Giả sử Uư = Uđm = const.
Muốn thay đổi từ thông ta thay đổi dòng điện kích từ Ikt của động cơ.
Tốc độ không tải lý tưởng:
Uđm
TN
ω0
ω1
ω2
ω3
MCU3
U2
U1
M

![Sổ tay Vật tư chuyên ngành dùng trong mạng lưới cấp nước [A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250328/quyvanphi/135x160/332037009.jpg)

![Quy chuẩn kỹ thuật quốc gia QCVN 16:2017/BXD: [Hướng dẫn chi tiết/Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2018/20181114/dien_vi08/135x160/3371542207812.jpg)


















![Gia Công & Lắp Đặt Cốt Thép: Kỹ Thuật Xây Dựng Bê Tông [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/58891780257145.jpg)
![Gia Công Ván Khuôn: Lắp Dựng, Tháo Dỡ và Kỹ Thuật Xây Dựng [Chi Tiết A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/4261780257147.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)