TR NG Đ I H C H I PHÒNGƯỜ Ạ Ọ Ả
KHOA CÔNG NGHỆ
C NG HÒA XÃ H I CH NGHĨA VI T NAMỘ Ộ Ủ Ệ
Đ c l p – T do – H nh phúcộ ậ ự ạ
Đ THI H C PH N: MÁY T Đ NG VÀ RÔB T CÔNG NGHI PỀ Ọ Ầ Ự Ộ Ố Ệ
Th i gian làm bài: 90 (Phút)ờ
(Dùng cho h chính qui)ệ
Đ thi s : ề ố 07
Câu 1: Các b c thi t l p ph ng trình đ ng h c c a rôb tướ ế ậ ươ ộ ọ ủ ố . Trình bày cách
xác đ nh các h t a đ ?ị ệ ọ ộ
Câu 2: Trên các máy công c : khoan, hàn đi m, doa t a đ … ng d ng d ngụ ể ọ ộ ứ ụ ạ
đi u khi n nào, trình bày d ng đi u khi n đó?ề ể ạ ề ể
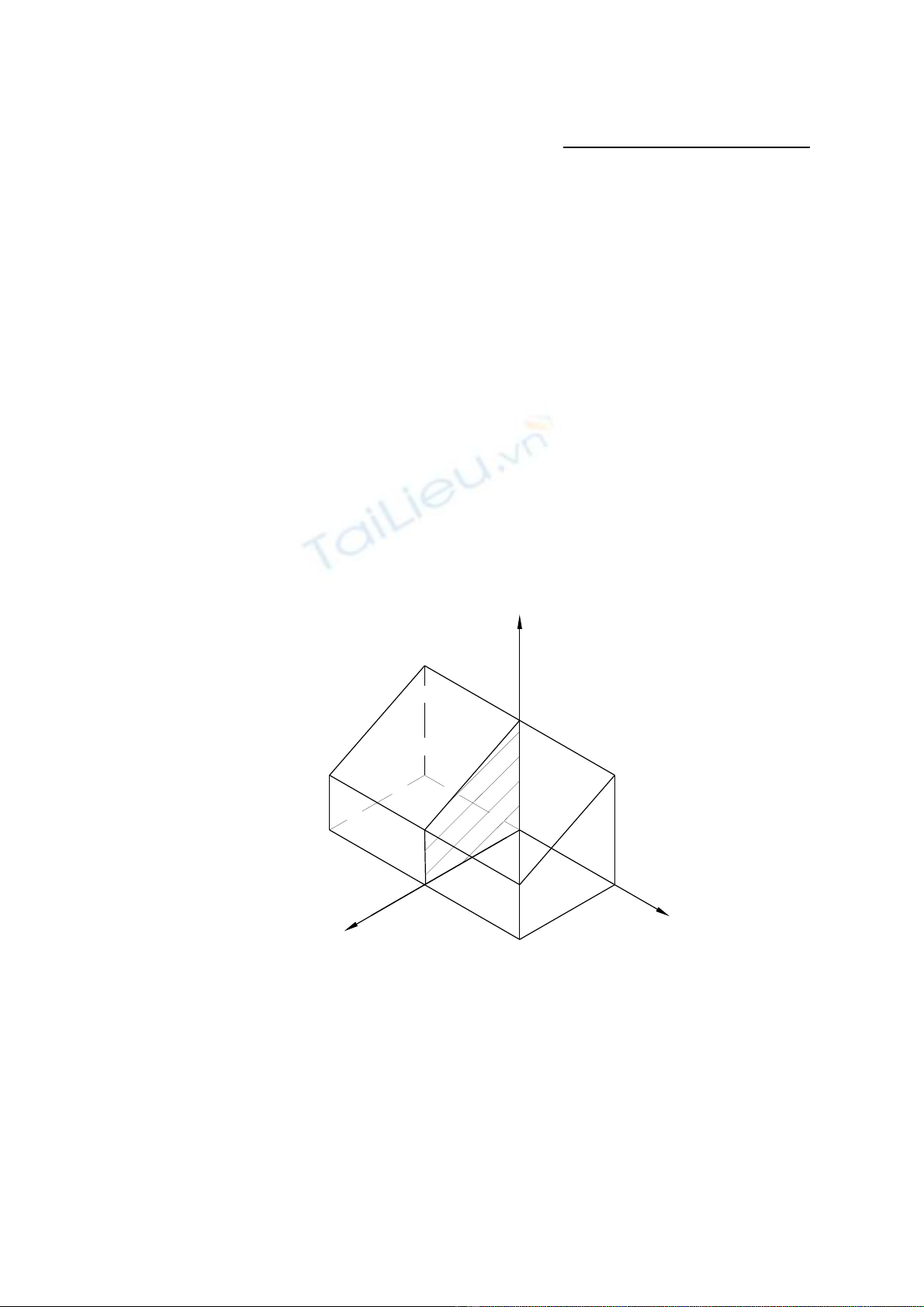
Câu 3: Cho m t v t th ộ ậ ể đ c đ t trong h t a đ chu n O(x,y,z) nh hìnhượ ặ ệ ọ ộ ẩ ư
v . Hãy th c hi n phép bi n đ i sau:ẽ ự ệ ế ổ
H = Tp [10,0,0].T[0,10,0].R[z,900]
X
0
Y
0
Z
0
O
0
B
A
D
C
H
G
E
F
(10,10,0,1)
(10,10,5,1)
(0,10,0,1)
(0,10,10,1)
(0,-10,10,1)
(0,-10,0,1)
(10,-10,5,1)
(10,-10,0,1)
Chú ý: SV không đ c s d ng tài li u.ượ ử ụ ệ
Cán b coi thi không gi i thích gì thêm.ộ ả

TR NG Đ I H C H I PHÒNGƯỜ Ạ Ọ Ả
KHOA CÔNG NGHỆ
C NG HÒA XÃ H I CH NGHĨA VI T NAMỘ Ộ Ủ Ệ
Đ c l p – T do – H nh phúcộ ậ ự ạ
ĐÁP ÁN H C PH N: MÁY T Đ NG VÀ RÔB T CÔNG NGHI PỌ Ầ Ự Ộ Ố Ệ
Đ thi s : ề ố 07
Câu 1: Các b c thi t l p ph ng trình đ ng h c c a rôb t? Trình bày cáchướ ế ậ ươ ộ ọ ủ ố
xác đ nh các h t a đ ?ị ệ ọ ộ
Tr l iả ờ
a) Đ thi t l p ph ng trình đ ng h c c a robot có th ti n hành theo các b c sau:ể ế ậ ươ ộ ọ ủ ể ế ướ
1. Xác đ nh các h to đị ệ ạ ộ
2. L p b ng thông s DH.ậ ả ố
3. Xác đ nh các ma tr n Aị ậ i theo các thông s DH.ố
4. Tính các ma tr n Tậi.
5. L p ph ng trình đ ng h c c b n.ậ ươ ộ ọ ơ ả
b) Cách xác đ nh các h to đị ệ ạ ộ
Vi c g n h to đ v i các khâu có vai trò r t quan tr ng khi thi t l p hệ ắ ệ ạ ộ ớ ấ ọ ế ậ ệ
ph ng trình đ ng h c c a robot. Nguyên t c chung đã trình bày trong ph n 8.3.ươ ộ ọ ủ ắ ầ
Trong th c t các tr c n i kh p đ ng c a robot th ng song song ho c vuông gócự ế ụ ố ớ ộ ủ ườ ặ
v i nhau, t c là r i vào nh ng tr ng h p đ c bi t, nên có th gây nh m l n. H nớ ứ ơ ữ ườ ợ ặ ệ ể ầ ẫ ơ
n a vi c xác đ nh các h to đ c n ph i phù h p v i các phép bi n đ i c a ma tr nữ ệ ị ệ ạ ộ ầ ả ợ ớ ế ổ ủ ậ
A1 đ có th s d ng đ c b thông s DH. Vì th , trình t xác đ nh các h to để ể ử ụ ượ ộ ố ế ự ị ệ ạ ộ
c n đ c l u ý các đi m sau:ầ ượ ư ể
- Tr c zụi ph i ch n cùng ph ng v i tr c kh p đ ng i + 1.ả ọ ươ ớ ụ ớ ộ
- Các h t a đ ph i tuân theo qui t c bàn tay ph i (đã nêu 8.3)ệ ọ ộ ả ắ ả ở
- Khi g n h to đ lên các khâu, ph i tuân theo các phép bi n đ i c a maắ ệ ạ ộ ả ế ổ ủ
tr n Aậi (xem công th c (8-19)). Đó là 4 phép bi n đ i:ứ ế ổ
R(z,θi); Tp(0,0,di); Tp(ai,0,0); R(x,αi)
Nh v y có th xem h to đ th i + 1 là do phép bi n đ i t h to đ thư ậ ể ệ ạ ộ ứ ế ổ ừ ệ ạ ộ ứ
i. Các phép quay (R) và t nh ti n (Tị ế p) trong các phép bi n đ i này ph i có m t trongế ổ ả ặ
các phép bi n đ i c a ma tr n Aế ổ ủ ậ i (công th c (8-19). Các thông s DH cũng đ c xácứ ố ượ
đ nh d a vào các phép bi n đ i này.ị ự ế ổ
Vi c g n h to đ lên các khâu v trí, khi mà các bi n kh p có giá tr banệ ắ ệ ạ ộ ở ị ế ớ ị
đ u, th ng b ng 0.ầ ườ ằ
Câu 2 : Trên các máy công c : khoan, hàn đi m, doa t a đ … ng d ng d ngụ ể ọ ộ ứ ụ ạ
đi u khi n nào, trình bày d ng đi u khi n đó?ề ể ạ ề ể
Tr l iả ờ
* Trên các máy công c : khoan, hàn đi m, doa t a đ … ng d ng d ng đi u khi nụ ể ọ ộ ứ ụ ạ ề ể
theo đi m.ể
* Đi u khi n theo đi m.ề ể ể
D ng c s đ c ch y dao nhanh t i các đi m đã đ c l p trình, trong hànhụ ụ ẽ ượ ạ ớ ể ượ ậ
trình này dao không c t vào chi ti t. Ch khi đ t t i các đi m đích quá trình gia côngắ ế ỉ ạ ớ ể
m i đ c th c hi n theo l ng ch y dao đã l p trình.ớ ượ ự ệ ượ ạ ậ
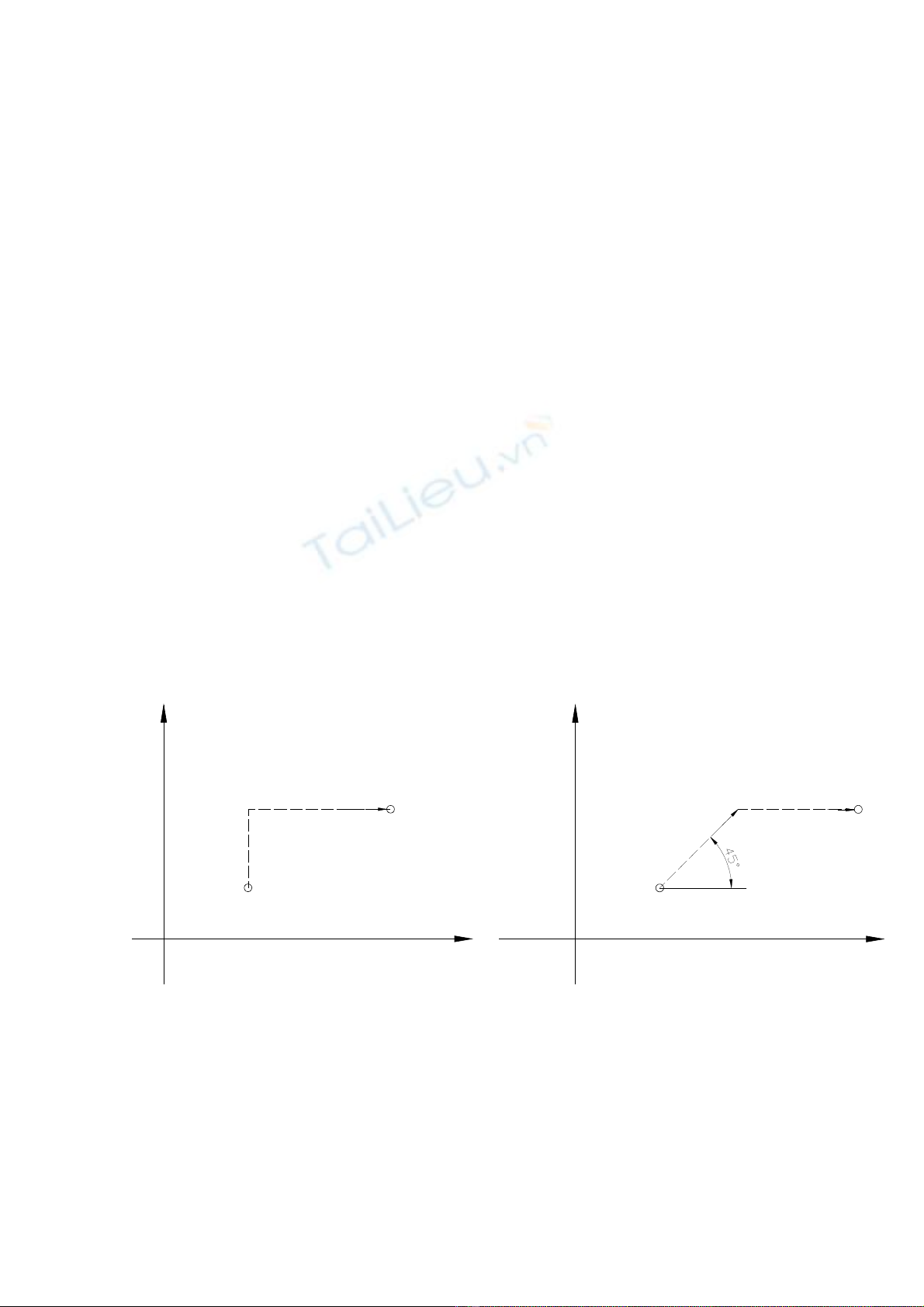
Tùy theo d ng đi u khi n, các tr c có th chuy n đ ng k ti p nhau ho c t tạ ề ể ụ ể ể ộ ế ế ặ ấ
c các tr c có chuy n đ ng đ ng th i song không có m i quan h hàm s gi a cácả ụ ể ộ ồ ờ ố ệ ố ữ
tr c. Khi các tr c có chuy n đ ng đ ng th i h ng c a các chuy n đ ng đ c t oụ ụ ể ộ ồ ờ ướ ủ ể ộ ượ ạ
thành góc 450.
P
1
P
2
X
Y
O
P
1
P
2
X
Y
O
Các tr c ch y l n l t Các tr c ch y đ ng th iụ ạ ầ ượ ụ ạ ồ ờ
Hinh 1. Các đ ng ch y dao trong đi u khi n đi mườ ạ ề ể ể
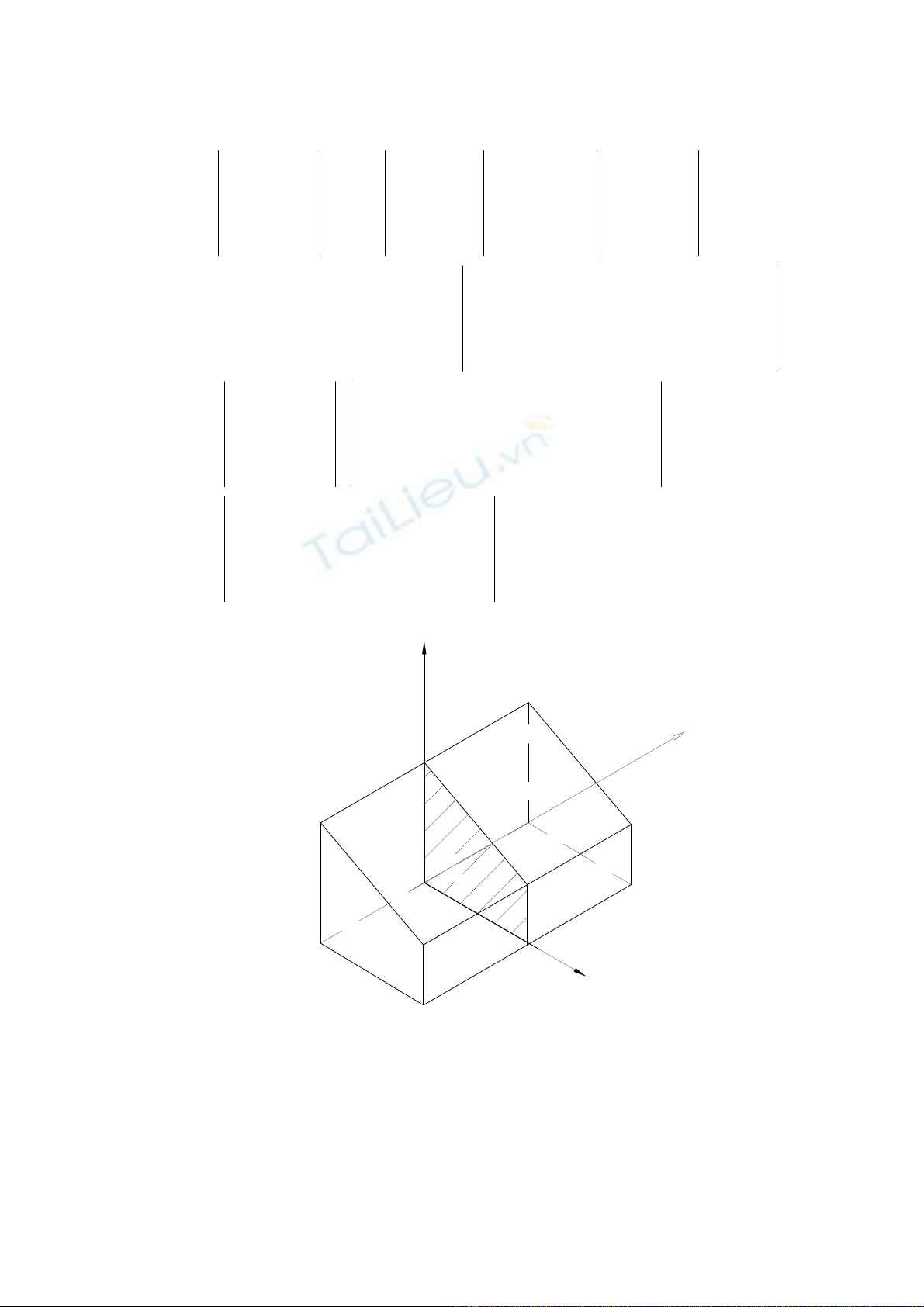
Câu 3:
H = Tp [10,0,0].T[0,10,0].R[z,900]
TPx =
1000
0100
0010
10001
; TPy =
1000
0100
10010
0001
; R[z,90o] =
1000
0100
0001
0010 −
⇒ H = Tp [10,0,0].T[0,10,0].R[z,900].
11111111
5001001050
1010101010101010
101000001010
−−−−
⇒ H =
1000
0100
10001
10010 −
.
11111111
5001001050
1010101010101010
101000001010
−−−−
⇒ H =
11111111
5001001050
2020101010102020
202020200000
X
3
Y
3
Z
3
O
3
D
F
A
B
C
E
H
G
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)