21 August 2011 Hon.-Prof. Prof. Dr.-Ing. habil. Ng. Ph. Quang ĐHBK Hà Nội1
Điềukhiểnsố
(Digital Control Systems)
Các ví dụ: Đánh sốthứtựtheo
chương của giáo trình cùng tên
(Version 5, 8/2011)
21 August 2011 Hon.-Prof. Prof. Dr.-Ing. habil. Ng. Ph. Quang ĐHBK Hà Nội2
1. Mô hình tín hiệuvàhệthống
1.2 Mô hình tín hiệutrênmiềnảnh z
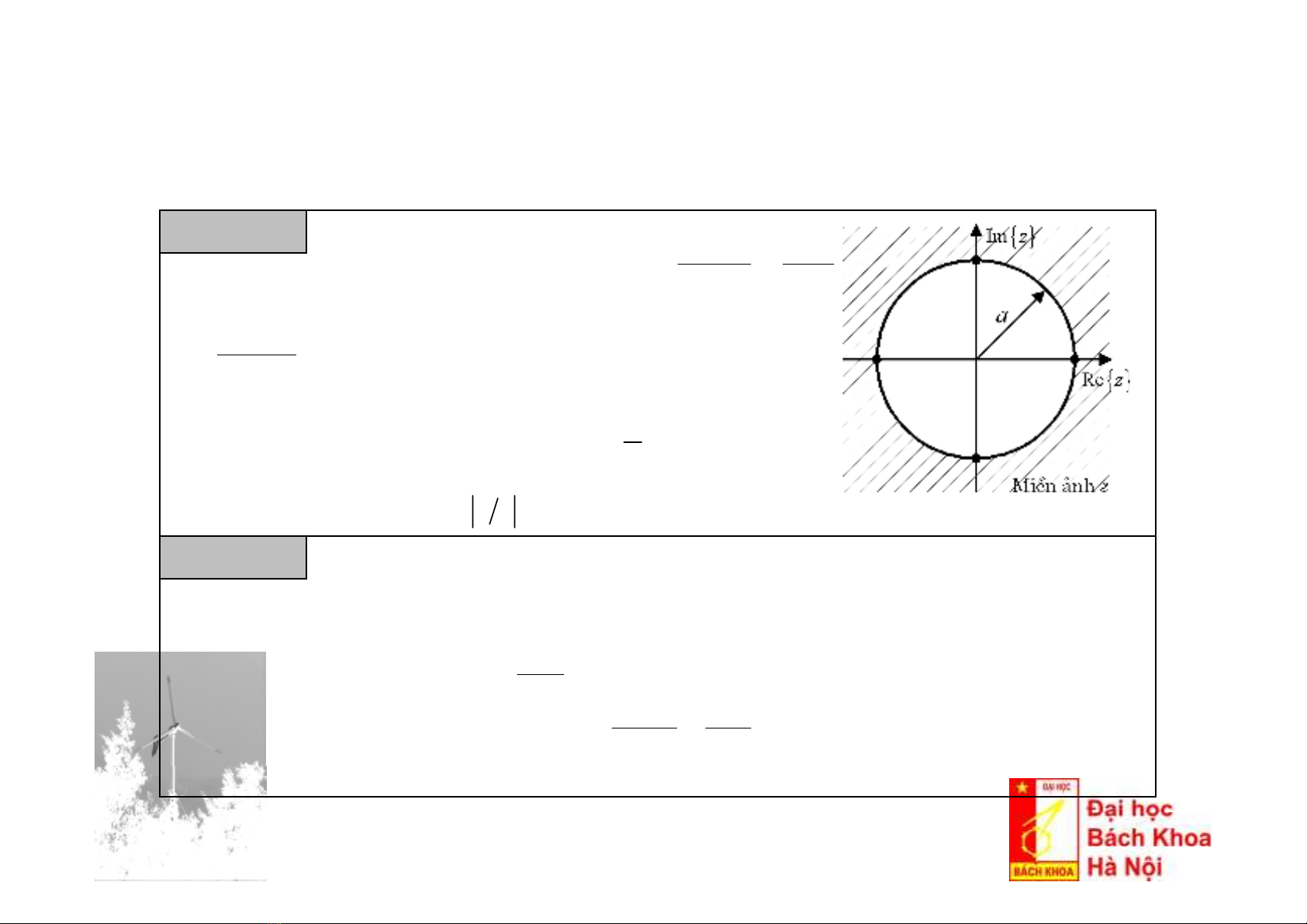
Ví dụ1.2.1 Một tín hiệugiánđoạnvề
thờigianđượcmôtảbởi:
()
1
1
1
1
z
Uz z
z−
==
−
−
Lờigiải:
Dễdàng tìm ảnh zcủatínhiệukểtrên bằng cách tính tổng
Laurent:
()
()
00
k
kk
kk
a
Uz az
z
∞∞
−
==
⎛⎞
⎟
⎜
==
⎟
⎜⎟
⎟
⎜
⎝⎠
∑∑
Chuỗitrênchỉhộitụkhi , tứclàởvùng phía ngoài đường tròn có bán kính a.
1az<
Hãy đi tìm ảnh U(z) và miềnhộitụcủatínhiệu!
Ví dụ1.2.2 Hãy đi tìm ảnh zcủahàm bướcnhẩyđơnvị1(t) !
() () ( )
()
1
00
1 khi 0 1 khi 0,1, 2,
11 1
0khi 0 0khi 0
k
k
k
kk
tk
ut u U z z z
tk
∞∞
−−
==
⎧⎧
≥=
⎪⎪
⎪⎪
== ⇒ = ⇒ = ⋅=
⎨⎨
⎪⎪
<<
⎪⎪
⎩⎩ ∑∑
…
()
01
s
s
r
rq q
∞
=
=−
∑
()
1
1
1
1
z
Uz z
z−
==
−
−
Kếtquảtrên đúng vớimọi giá trịtrên toàn miềnz, trừđiểmz= 1.
Khi thay vào chuỗi: các giá trịq= z-1 và r= 1 ta thu được:
21 August 2011 Hon.-Prof. Prof. Dr.-Ing. habil. Ng. Ph. Quang ĐHBK Hà Nội3
1. Mô hình tín hiệuvàhệthống
1.2 Mô hình tín hiệutrênmiềnảnh z
Ví dụ1.2.3
Ví dụ1.2.4
Hãy tìm ảnh zcủahàm e mũ(hàm exponent) !
() ( ) ( )
()
1
00
;0 ; 0,1,2, k
at akT akT k aT
k
kk
ft e t fkT f e k Fz e z e z
∞∞
−−
==
=≥⇒ == = ⇒ = =
∑∑
…
Kếtquảtính tổng củachuỗilà:
()
1
1
11
aT
aT aT
ez
Fz ez e z
−
−−
==
−−
Hãy tìm ảnh zcủahàm dốctuyến tính !
(
)
; 0; constft att a=≥=
Dễdàng viếtđượcảnh F(z) dướidạng chuỗinhưsau:
()
0
k
k
F
zakTz
∞−
=
=∑
Để tính tổng trên ta phảiáp
dụng nguyên lý tịnh tiếnvà
sửdụng ảnh zcủahàmbước
nhẩy1(t) và viếtlại công
thứctrên:
()
()
123
23
3
12 12
1
2
11 1
11 1
Tz Tz Tz
Tz Tz
Fz a Tz
zz z
aT z z aT z z
zz z
zz aTz
aT z
zz z
−−−
−−
−
−− −−
−
⎡
⎤
+++
⎢⎥
⎢⎥
++
⎢⎥
=⎢⎥
+
⎢⎥
⎢⎥
⎢⎥
⎣⎦
⎡⎤
⎡
⎤
⎢⎥
=++=++
⎢
⎥
⎣
⎦
⎢⎥
−− −
⎣⎦
==
−− −
21 August 2011 Hon.-Prof. Prof. Dr.-Ing. habil. Ng. Ph. Quang ĐHBK Hà Nội4
1. Mô hình tín hiệuvàhệthống
1.2 Mô hình tín hiệutrênmiềnảnh z
Ví dụ1.2.5
Bổxung lý thuyết:
Tìm hàm gốccủaảnh zcho trướcbằng phương pháp tách phân thứchữutỷthành
các phân thứctốigiản. Sau đólầnlượt tìm hàm gốccủa các phân thứctốigiản.
k
za
za⇔
−
()
()
1;1,2,
1
1
1
km
m
mkm
k
zam
m
za
k
za a
m
−+
−−
⎛⎞
⎟
⎜⎟
⇔=
⎜⎟
⎜⎟
⎜⎟
−
⎝⎠
−
⎛⎞
−⎟
⎜⎟
−⇔
⎜⎟
⎜⎟
⎜⎟
−
⎝⎠
•Điểmcựcđơn: •Điểmcựclặplạimlần:
Cho trướcảnh zcó dạng phân thức:
()
2
0,9
0,5 0, 4
0,1 0, 2
z
zz
Fz zz
zz
==−
−+
−−
Áp dụng công thứcđể tìm hàm gốc:
(
)
0,5 0, 4 k
k
k
f=−−
Ví dụ:
21 August 2011 Hon.-Prof. Prof. Dr.-Ing. habil. Ng. Ph. Quang ĐHBK Hà Nội5
1. Mô hình tín hiệuvàhệthống
1.2 Mô hình tín hiệutrênmiềnảnh z
()
(
)
(
)
0,9
0,5 0, 4
z
Fz zz
=−+
Xét hàm ảnh cho ởví dụ1.2.5:
() ()
()()
() ()
()()
()
1
2
1
1
10,5
z
1
1
20,4
z
0,9 0,5
0,5 Res lim 0,5
0,5 0, 4
0,9 0, 4
0, 4 Res lim 0, 4
0,5 0, 4
k
kk
z
k
k
k
z
zz z
zFzz
zz
zz z
zFzz
zz
−
−
→
−
−
→−
⎧
⎡
⎤
⎪−
⎪⎢⎥
⎡⎤
⎪=⇒ = =
⎪⎢⎥
⎢⎥
⎣⎦
⎪−+
⎢⎥
⎪⎣⎦
⎪
⎪
⎨
⎪⎡⎤
+
⎪⎢⎥
⎪⎡⎤
=− ⇒ = =− −
⎪⎢⎥
⎢⎥
⎣⎦
⎪−+
⎪⎢⎥
⎣
⎦
⎪
⎩
⎪
Có hai điểmcựcz1, z2, vậykhi:
Hàm gốccódạng sau:
(
)
0,5 0, 4 k
k
k
f=−−
Ví dụ1.2.6 Bổxung lý thuyết:Tìm hàm gốccủaảnh zcho trướcbằng phương pháp tính
Residuum. Khi z= zνlà điểmcực
-lặplạimlần:
-đơn:
Hàm gốccódạng:
()
1
1
Res
n
k
k
f
Fzz
ν
−
=
⎡⎤
=⎢⎥
⎣⎦
∑
() () ()( )
() ()( )
1
11
1
z
11
z
1
Res lim
1!
Res lim
mm
kk
m
zz
kk
zz
d
Fzz Fz z z z
mdz
Fzz Fz z z z
ν
ν
ν
ν
ν
ν
−
−−
−
→
−−
→
⎡
⎤
⎡⎤
=−
⎢
⎥
⎢⎥
⎣⎦
⎣
⎦
−
⎡⎤⎡ ⎤
=−
⎢⎥⎢ ⎥
⎣⎦⎣ ⎦


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)