PHẦN 3 TRANG BỊ ĐIỆN
ĐHSPKT Hưng Yên _ Khoa Điện – Điện Tử 18
Chương 1: CÁC NGUYÊN TẮC ĐIỀU KHIỂN TỰ ĐỘNG TRUYỀN ĐỘNG ĐIỆN
1.1. Khái niệm chung
Khi mở máy các động cơ có công suất trung bình và lớn người ta phải dùng các
thiết bị hạn chế dòng khởi động như: Điện trở, điện kháng, máy biến áp tự ngẫu.....
Trong quá trình khởi động muốn tốc độ động cơ tăng dần đến giá trị định mức, thì ta
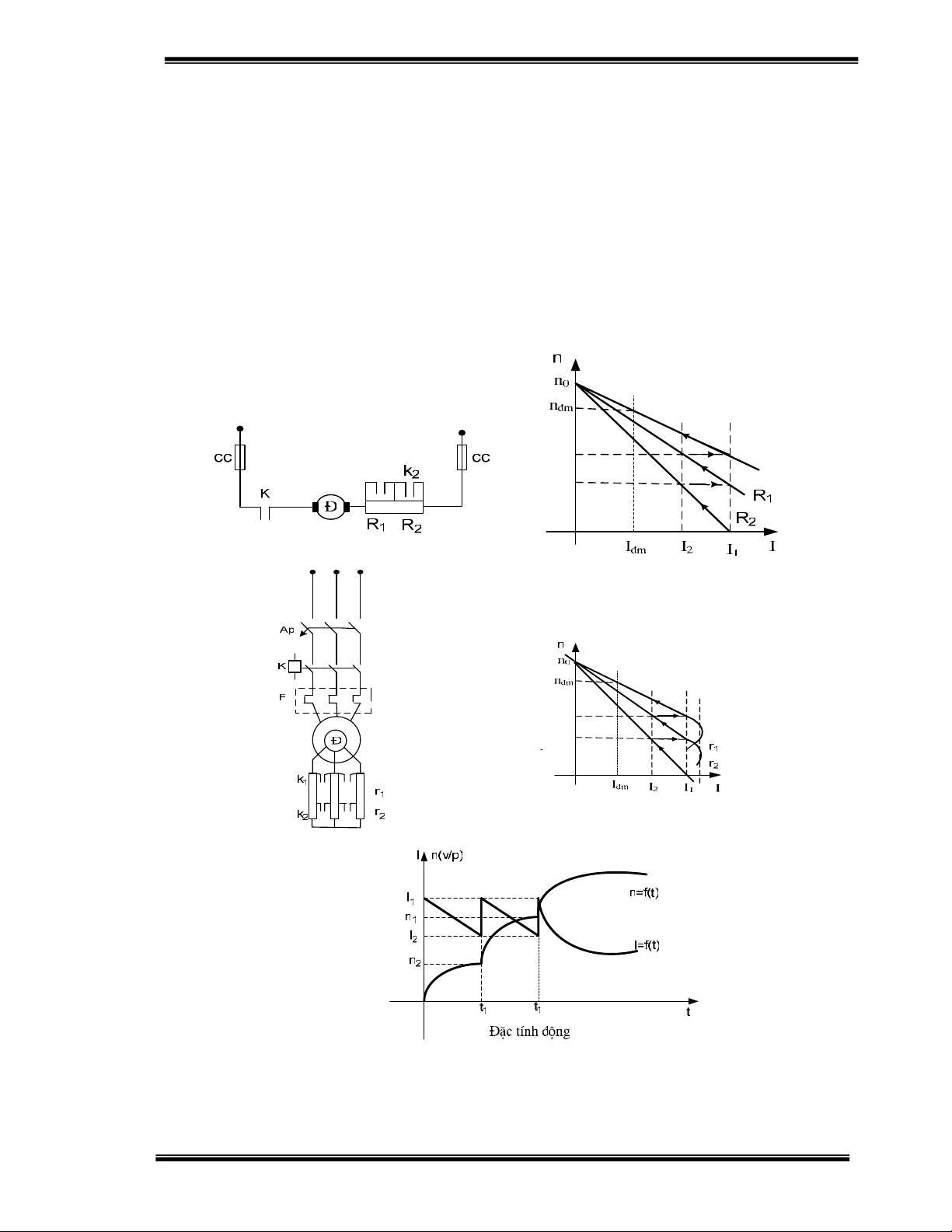
phải tìm cách loại dần các thiết bị hạn chế đó ra. Một cách tổng quát ta có sơ đồ mạch
động lực, đặc tính tĩnh, đặc tính động của quá trình mở máy động cơ điện 1 chiều, xoay
chiều như hình vẽ.
Nhìn vào đặc tính tĩnh và đặc tính động ta có nhận xét:
PHẦN 3 TRANG BỊ ĐIỆN
ĐHSPKT Hưng Yên _ Khoa Điện – Điện Tử 19
- Quá trình khởi động đi theo chiều mũi tên, tốc độ động cơ tăng dần ứng với việc loại
dần các cấp điện trở phụ.
- Nếu ta sử dụng các thiết bị để đo khoảng thời gian từ 0- t1, t1-t2 bằng các rơle thời
gian và tại đó ta phát các lệnh điều khiển làm thay đổi tham số của mạch điện ( RP,
XP..) và điều khiển quá trình theo mong muốn gọi là tự động khống chế theo nguyên
tắc thời gian.
- Nếu như ta sử dụng các thiết bị đo tốc độ như rơle ly tâm, máy phát tốc để đo tốc độ
n1, n2 và tương tự như trên ta có tự động khống chế theo nguyên tắc tốc độ.
- Nếu sử dụng rơ le dòng điện để đo dòng điện I1, I2 và tương tự ta có phương pháp tự
động khống chế theo nguyên tắc dòng điện.
- Trong thực tế có nhiều bộ phận của máy làm việc bị giới hạn bởi góc quay hay
quãng đường nhất định khi đó người ta sử dụng phương pháp khống chế theo
nguyên tắc hành trình.
1.2 Các nguyên tắc điều khiển hệ thống truyền động điện kiểu hở
1.2.1 Nguyên tắc điều khiển theo thời gian.
• Nội dung nguyên tắc
Điều khiển theo nguyên tắc thời gian dựa trên cơ sở là thông số làm việc của
mạch biến đổi theo thời gian. Những tín hiệu điều khiển phát ra theo quy luật thời gian
cần thiết để làm thay đổi trạng thái của hệ thống. Những phần tử thụ cảm được thời gian
để phát tín hiệu cần được chỉnh định dựa theo ngưỡng chuyển đổi của đối tượng. Ví dụ
như tốc độ, dòng điện, mô men của mỗi động cơ được tính toán chọn ngưỡng cho thích
hợp cho từng hệ thống truyền động điện cụ thể.
Những phần tử thụ cảm được thời gian có thể gọi là rơ le thời gian. Nó tạo nên
được một khoảng thời gian trễ (duy trì) kể từ lúc có tín hiệu đưa vào (mốc không) đầu
vào của nó đến khi nó phát được tín hiệu ra đưa vào phần tử chấp hành.
Các cơ cấu duy trì thời gian có thể là: cơ cấu con lắc, cơ cấu điện từ, khí nén, cơ
cấu điện tử, tương ứng là rơ le loại đó,…
Bằng giải tích hoặc bằng đồ thị mà người ta xác định số cấp điện trở phụ mở
máy, giá trị điện trở của từng cấp, đặc tính động để chỉnh định thời gian tác động của
rơ le, các khoảng thời gian được tính tương đối như sau:
t =
2
1
21
12 ln
đg
đg
đgđgM
M
MM −
−
ωω
J là mô men quán tính
Mđg1, Mđg2 là mô men động
PHẦN 3 TRANG BỊ ĐIỆN
ĐHSPKT Hưng Yên _ Khoa Điện – Điện Tử 20
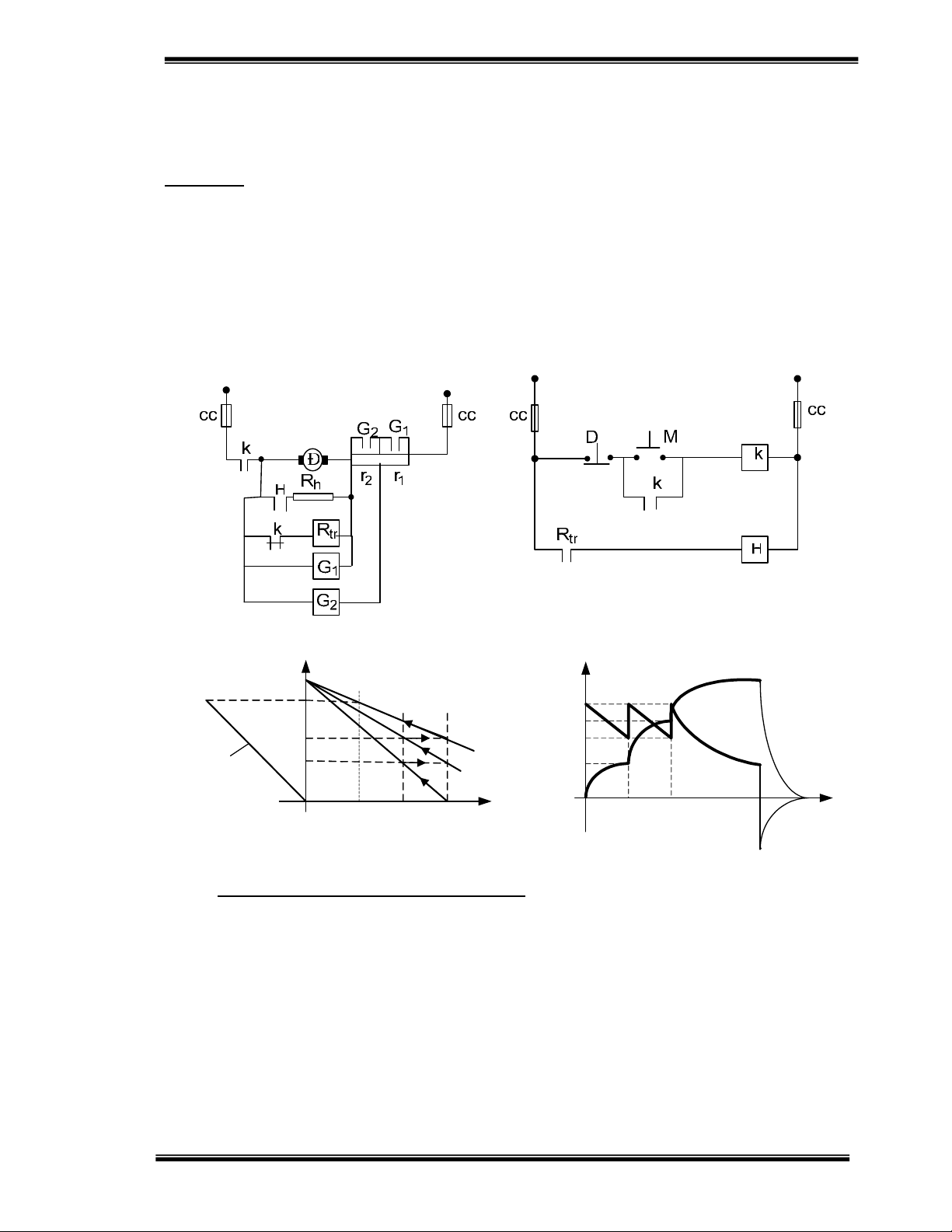
Ví dụ minh hoạ
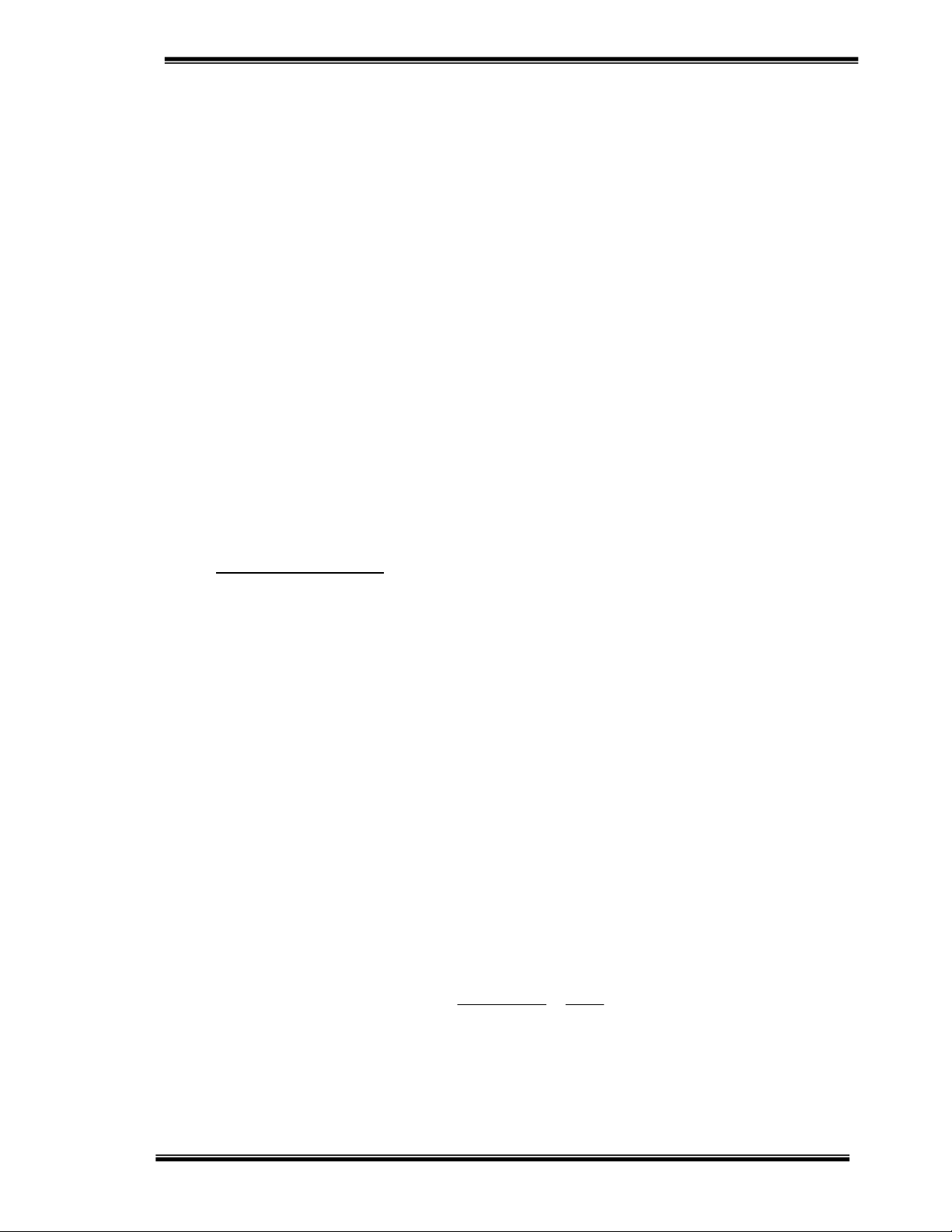
Mạch mở máy động cơ điện một chiều qua hai cấp điện trở phụ trong mạch phần ứng:
Hình 2.2 Mạch điều khiển theo nguyên tắc thời gian
Trong sơ đồ không giới thiệu cách cấp nguồn nhưng cần phải lưu ý rằng ở mọi chỗ có
nguồn đều phải được cấp đầy đủ trước khi vận hành, nhất là cần chú ý đến nguồn kích từ..
Trạng thái ban đầu sau khi cấp nguồn động lực và điều khiển thì rơ le thời gian 1KT
được cấp điện mở ngay tiếp điểm thường kín đóng chậm 1KT. Để khởi động ta phải ấn nút mở
máy S2 công tắc tơ K1 hút để đóng các tiếp điểm ở mạch động lực, phần ứng động cơ điện
được đấu vào lưới điện qua các điện trở phụ khởi động r1, r2. Dòng điên qua các điện trở phụ
lớn gây sụt áp trên điện trở r1. Điện áp đó vượt quá mức điện áp hút của rơ le thời gian 2KT
làm cho nó hoạt động mở ngay tiếp điểm thừơng đóng đóng chậm 2KT, trên mạch K3 cùng với
sự hoạt động của rơle 1KT chúng bảo đảm không cho công tắc tơ K1, K2 có điện trong giai
đoạn đầu của quá trình khởi động. Tiếp điểm phụ K1 dóng để tự duy trì cho cuộn hút công tắc
tơ K1 khi ta thôi không ấn nút S2 nữa. Tiếp điểm K1 mở ra cắt rơ le thời gian 1KT đưa rơ le
thời gian này vào hoạt động để chuẩn bị phất tín hiệu chuyển trạng tháu hoạt động của truyền
động điện. Mốc không của thời gian t có thể được xem là thời điểm K1 mở cắt điện 1KT.
Thời gian chỉnh định ở mõi cấp điện trở được tính theo công thức: ti= Tci ln McM
McM
−
−
2
1
Trong đó Tci : hằng số thời gian điên cơ của động cở đặc tính có điện trở phụ ở cấp thứ i
Sau khi rơ le thời gian 1RTh nhả, cơ cấu duy trì thời gian sẽ tính thời gian từ gốc không
cho đến đạt trị số chỉnh định thì đóng tiếp điểm thường kín đóng chậm 1KT.
Lúc này cuộn dây công tắc tơ gia tốc K1 được cấp điên và hoạt động đóng tiếp điểm
chính của nó ở mạch động lựcvà cấp điện trở phụ khởi động thứ nhất r1 bị nối ngắn mạch .
động cơ sẽ chuyển sang khởi động trên đường đặc tính cơ thứ hai việc ngắn mạch điện trở r1
làm cho rơle thời gian 2KT mất điện và cơ cấu duy trì thời gian của nó cũng sẽ tính thời gian
tương tự như đối với rơle 1KT, khi đạt trị số chỉnh định nó sẽ đóng tiếp điểm thường đóng
đóng chậm 2KT. Công tắc tơ gia tốc K3 có điện hút tiếp điểm chính K3 ngắn mạch cấp điện
trở thứ hai r2 động cơ sẽ chuyển sang tiếp tục khởi động trên đường đặc tính cơ tự nhiên cho
đến điểm làm việc ổn định
Những yếu tố ảnh hưởng đến nguyên tắc
Khi tính toán các đường đặc tính mở máy động cơ thường ta xét ở chế độ định
mức. Nhưng thực tế do điện lưới, mô men cản, mô men quán tính và nhiệt độ thay đổi
so với tính toán, các yếu tố đó ảnh hưởng trực tiếp đến đặc tính khởi động.
PHẦN 3 TRANG BỊ ĐIỆN
ĐHSPKT Hưng Yên _ Khoa Điện – Điện Tử 21
1.2.2 Nguyên tắc khống chế theo tốc độ
• Nội dung nguyên tắc
Để khống chế theo nguyên tắc này ta phải đo được tốc độ động cơ, có thể đo trực
tiếp bằng rơle kiểm tra tốc độ, nhưng khi hệ thống khống chế có nhiều cấp điện trở thì
việc điều khiển gặp rất nhiều khó khăn do đó thực tế ít sử dụng. Ngoài ra ta còn có thể
đo tốc độ bằng máy phát tốc nhưng trong các hệ thống đơn giản thì chỉ tiêu kinh tế thấp
(máy phát tốc có giá thành cao) nên ít dùng loại này. Thông thường người ta sử dụng
phương pháp đo gián tiếp.
+ Đối với động cơ điện 1 chiều, đo tốc độ thông qua sđđ phần ứng của động cơ.
EĐ= Ke.Φ.n (dùng rơ le điện áp mắc song song với phần ứng động cơ).
+ Đối với động cơ KĐB, đo tốc độ gián tiếp qua sđđ rotor, tần số dòng điện rotor và hệ
số trượt.
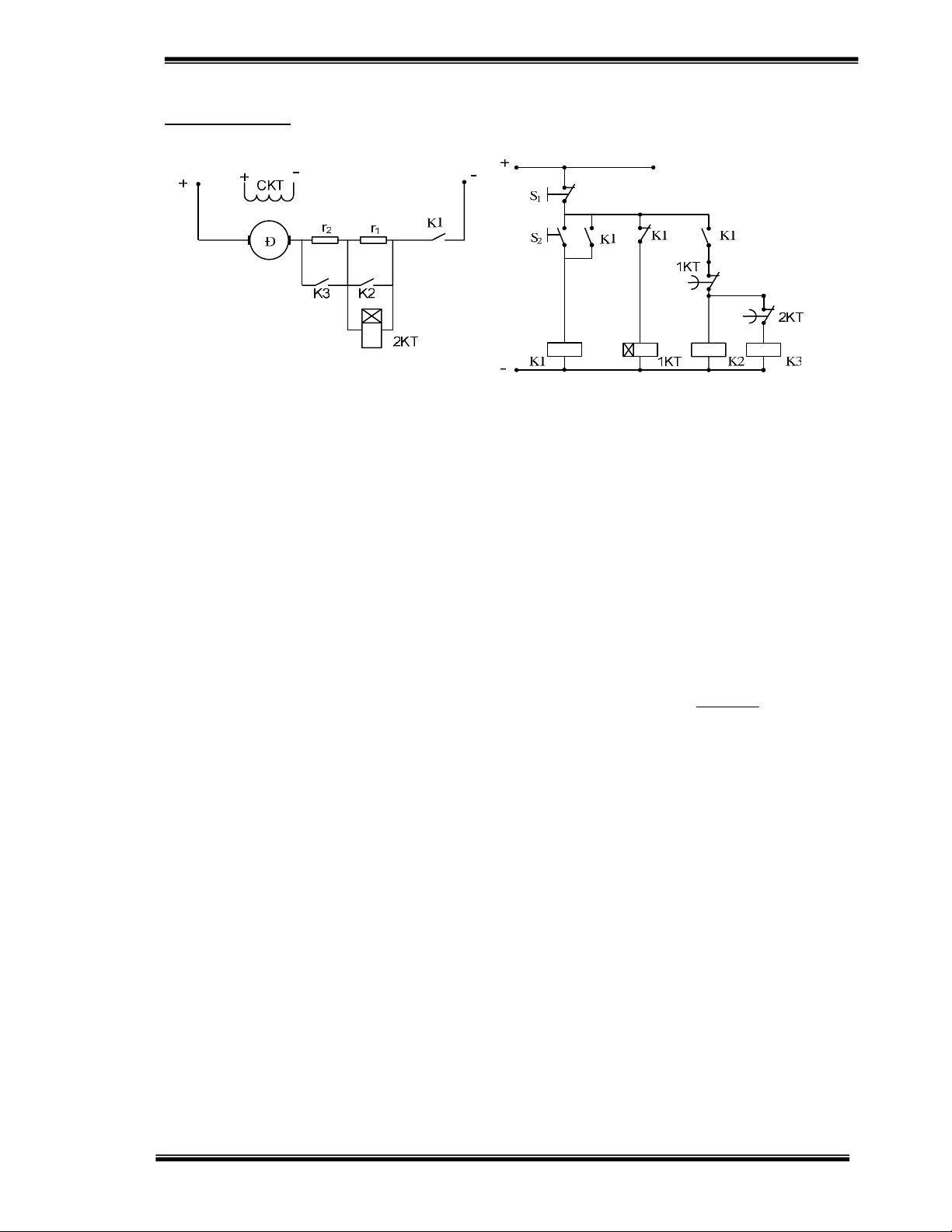
• Sơ đồ đặc trưng.
Theo định luật Kirchhoff 2 ta có:
Vòng 1 U
G1= Eư + Iư Rư = Ke.φ.n2+ Iư Rư
Vòng 2 U
G2= + Iư( Rư+R2) =Ke.φ.n1+ Iư( Rư+R2)
Xét trường hợp 1: Khi tốc độ động cơ tăng đến tốc độ n1 nào đó thì
U
G1= Eư + Iư Rư = Ke.φ.n2+ Iư Rư = UG1tđ
Dẫn đến rơle điện áp G1 tác động đóng tiếp điểm G1 lại loại bỏ cấp điện trở phụ R1 ra
khỏi mạch phần ứng động cơ.
Xét trường hợp 2: Khi tốc độ động cơ tăng đến tốc độ n2 nào đó thì
U
G1= Eư + Iư( Rư+R2) = Ke.φ.n2+ Iư( Rư+R2) = UG1tđ
cc cc
G2
K
G2
R2R1
G1
§
CK§
G1
1
2
H
×
nh 2.4
PHẦN 3 TRANG BỊ ĐIỆN
ĐHSPKT Hưng Yên _ Khoa Điện – Điện Tử 22
Dẫn đến rơle điện áp G2 tác động đóng tiếp điểm G2 lại loại bỏ cấp điện trở phụ R2 ra
khỏi mạch phần ứng động cơ.
Nhận xét:
+ Ưu điểm: Đơn giản, rẻ tiền
+ Nhược điểm: Khi mô men cản, điện áp lưới và nhiệt độ thay đổi cũng làm thay
đổi thời gian mở máy của động cơ.
Việc chỉnh định điện áp hút của các rơ le cũng gặp nhiều khó khăn.
Ví dụ: Mạch điều khiển mở máy động cơ 1 chiều KTĐL qua 2 cấp điện trở phụ và
hãm động năng. Hình 2.5
1.2.3 Nguyên tắc khống chế theo dòng điện.
Khống chế theo nguyên tắc dòng điện nghĩa là khống chế quá trình theo các giá
trị đo được hoặc tính toán được. Trị số của dòng điện mở máy của động cơ dao động
giới hạn được xác định từ I2 tới I1, giá trị của dòng điện I1= 2,2÷2,5 dòng Iđm được xác
định căn cứ vào điều kiện vận hành của động cơ và giá trị cho phép của dòng điện phần
ứng động cơ. Giá trị dòng điện I2 = (1,8÷2)Iđm được xác định căn cứ vào việc đảm bảo
gia tốc tối thiểu khi mở máy động cơ ở phụ tải đã cho đến I1, I2 luôn lớn hơn Iđm
này.Muốn khống chế theo nguyên tắc dòng điện ta sử dụng một số rơ le dòng điện mắc
n
no
n
®m
n
n1
2
r
1
r
2
I
I1
I2
I®m
A
B
H·m
®éng
n¨ng
In(v/p)
I1
I2
n1
n2
t1t2t
n=f(t)
I=f(t)
§Æc tÝnh
®éng
H·m
®éng
n¨ng
H·m
®éng
n¨n
g
I


![Trang bị điện trong công trình: Chương 14 [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120724/butler2011/135x160/9351343093721.jpg)
![Giáo trình trang bị điện - Chương 10: Tổng quan và ứng dụng [Năm xuất bản]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120301/augi19/135x160/giao_trinh_trang_bi_dien_ii_phan_10_6121.jpg)

![Giáo trình trang bị điện - Chương 8: [Thêm mô tả cụ thể về nội dung chương để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120301/augi19/135x160/giao_trinh_trang_bi_dien_ii_phan_8_0919.jpg)
![Giáo trình trang bị điện - Chương 7: [Nội dung cụ thể của chương nếu có]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120301/augi19/135x160/giao_trinh_trang_bi_dien_ii_phan_7_7977.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)