Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
139
THIẾT KẾ SƠ BỘ ROBOT CHUYỂN ĐỘNG
TRONG ĐƯỜNG ỐNG THỦY LỢI
Đỗ Duy Hiệp1 và Vũ Minh Quang2
1Đại học Thủy lợi, email: hiepdd@tlu.edu.vn
2Đại học Thủy lợi, email: quangvmtl@gmail.com
1. GIỚI THIỆU CHUNG
Hiện nay ở các nước phát triển việc nghiên
cứu chế tạo các robot trong đường ống phục
vụ các mục đích khác nhau như thăm dò, sửa
chữa, thu thập dữ liệu đang phát triển mạnh
mẽ. Do đặc thù đường ống thủy lợi cấu tạo
bởi nhiều phần từ đơn giản đến phức tạp như
ống thẳng, ống cút, ống rẽ nhánh… nên điều
đó đòi hỏi các robot phải có khả năng di
chuyển rất tốt. Vì vậy các thiết bị robot trong
đường ống thường được ứng dụng các công
nghệ tiên tiến trong các lĩnh vực cơ khí, điều
khiển, quang học, âm thanh… Báo cáo này
phân tích các cấu hình của robot đi trong lòng
ống, xem xét sự tương thích với mục đích
thủy lợi từ đó lựa chọn và thiết kế một cấu
hình phù hợp.
2. PHƯƠNG PHÁP NGHIÊN CỨU
Nghiên cứu lý thuyết: từ việc nghiên cứu
các mô hình robot đã và đang thực hiện
trên thế giới đồng thời dựa trên lý thuyết về
ô tô máy kéo từ đó đưa ra cấu hình
cho robot.
3. KẾT QUẢ NGHIÊN CỨU
3.1. Cấu trúc tổng thể của robot
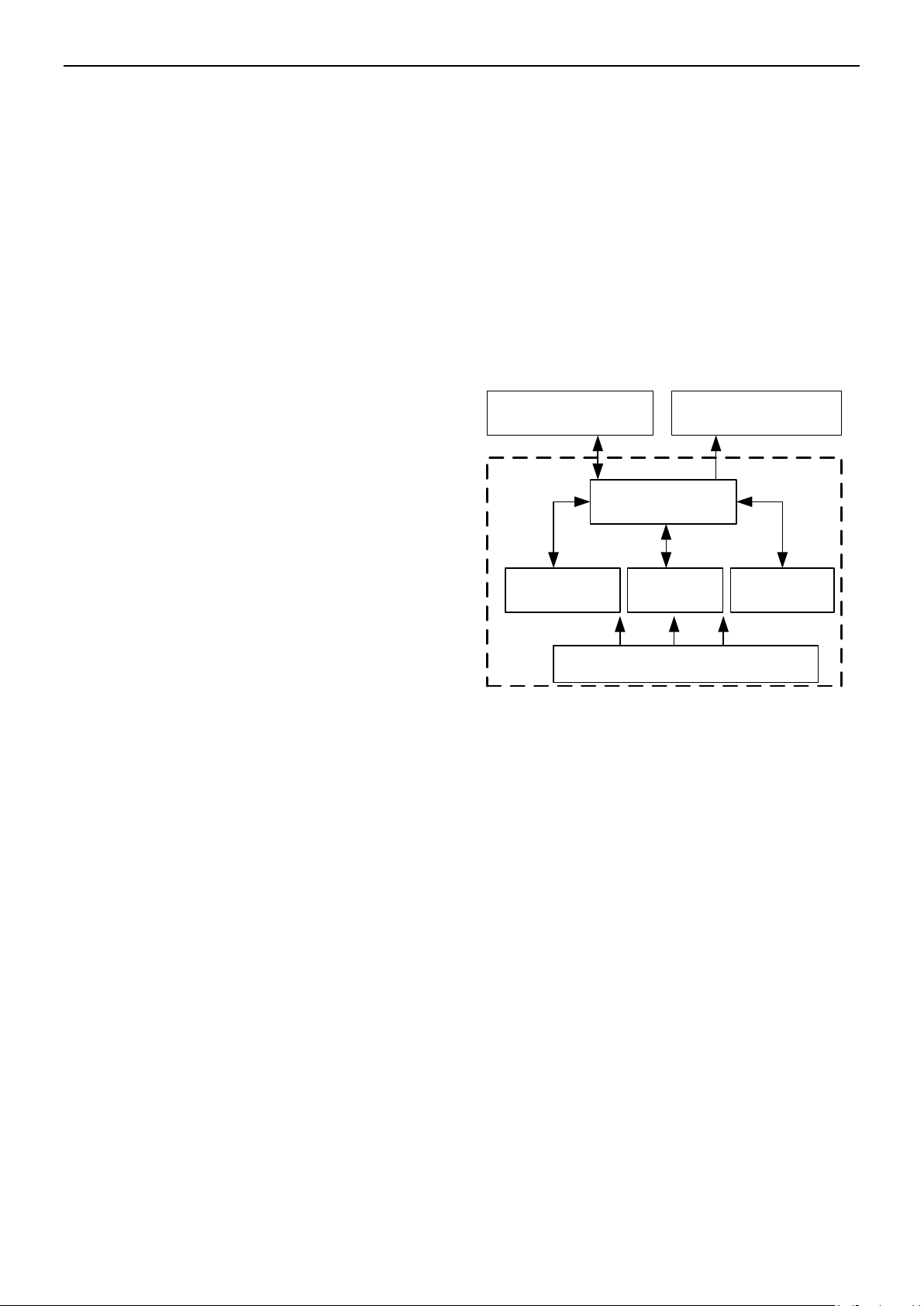
Cấu trúc robot như hình 1:
Tổng thể robot gồm có:
1. Bộ hiển thị dữ liệu: Dữ liệu từ camera
quan sát sẽ được truyền về trạm điều khiển
trung tâm và hiển thị.
5. Panel điều khiển 1. Hiển thị
6. Sensor
& Camera 4. Động cơ
dẫn hướng
3. Động cơ
di chuyển
2. Bộ điều khiển
8. Khối nguồn
7. Vỏ
Hình 1. Cấu trúc tổng thể của robot
2. Bộ điều khiển: Điều khiển tốc độ các
động cơ điện, giúp robot chuyển động theo
các phương bất kỳ theo người dùng điều
khiển, điều khiển động cơ quay camera.
3. Động cơ di chuyển: Bao gồm động cơ
bố trí trong robot, tạo nguồn động lực giúp
robot chuyển động tiến, lùi, rẽ.
4. Động cơ dẫn hướng: Bao gồm motor bố
trí lực giúp dẫn hướng robot chuyển động
5. Panel điều khiển: Panel gồm các nút
bấm để điều khiển bằng tay.
6. Sensors & Camera: Hệ thống các cảm
biến và camera dùng để xác định các thông
số thăm dò cần thiết.
7. Vỏ: Là nơi gá các phần robot.
8. Nguồn: Cấp điện cho robot.
3.2. Phân tích lựa chọn cấu hình cơ khí
Robot đường ống đã có một lịch sử phát
triển khá dài và chúng có thể được phân loại
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
140
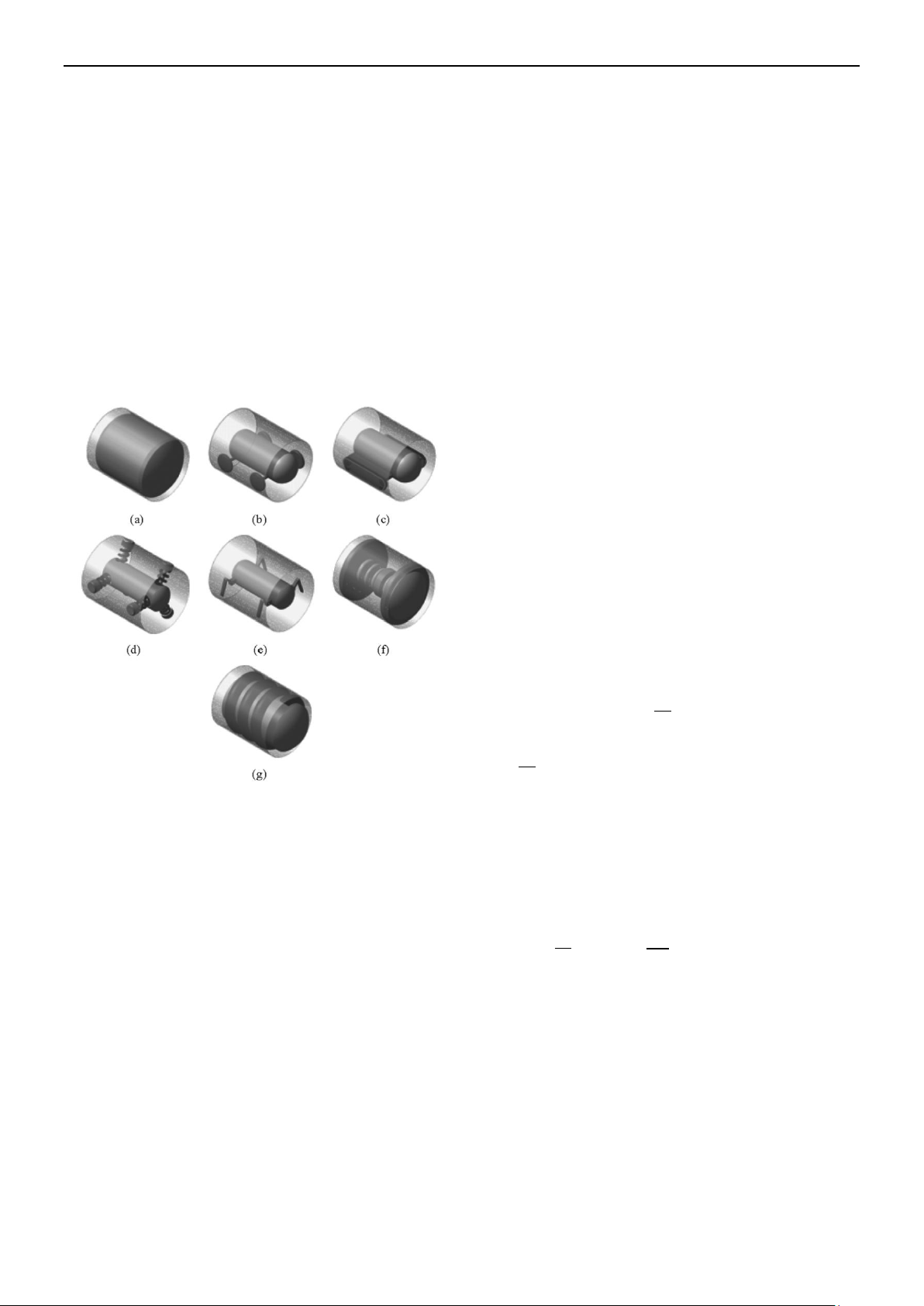
thành các cấu hình chính như Hình 2. Loại a
đơn giản nhất, chuyển động hoàn toàn thụ
động bởi dòng chảy trong ống. Loại b giống
như xe di chuyển trên mặt phẳng. Loại c thì
không dùng bánh xe mà dùng bánh xích để
tăng độ vững khi di chuyển. Loại d có các
chân tì lên thành ống, thích hợp với nhu cầu
di chuyển trong các ống dọc. Loại e có các
chân có thể bước đi nên có thể thực hiện
nhiều chuyển động phức tạp. Loại f và g hình
con sâu thường dùng trong các đường ống
kích thước nhỏ.
Hình 2. Các cấu hình cơ khí chính
của robot lòng ống
a) Phân tích lựa chọn
Phân tích các điều kiện trong đường ống
thủy lợi: các đường ống thủy lợi thường ẩm
ướt, tối tăm, nhiều bùn lầy, nhiều vật cản,
đường kính lớn vậy các cấu hình a, f, g, d tỏ
ra không phù hợp. Sơ đồ hình b chỉ phù hợp
với các đường ống không có hoặc có ít bùn vì
cấu trúc 4 bánh dễ bị lầy trong bùn. Còn lại
hai cấu trúc là e và c tương đối phù hợp với
những đường ống thủy lợi. Nhóm tác giả tập
trung thiết kế tính toán mô hình robot theo
cấu hình c.
b) Tính toán động lực robot
mô hình robot được thiết kế phù hợp với
đường ống đường ống lớn có D lớn hơn
50cm. Kích thước cơ bản cỏa robot 40cm
30 cm 40 cm.
Tính toán động lực robot dựa trên các
phương trình cơ bản sau:
Phương trình cân bằng công suất tổng quát.
Ne = Nf Ni + Nw Nj + Nr
+ Ne: Công suất phát ra của động cơ.
+ Nf : Công suất tiêu hao để thắng lực cản
Nf = G.f.v.cos 1.
1: góc dốc của mặt đường.
f: hệ số cản lăn, môi trường bùn, ruộng
f = 0,35 [1] ;
v: vận tốc của robot [m/s] ;
G: trọng lượng của robot [N].
Nf = G.f.v.cos = 80.0,35.0,2.1= 5,6 (W)
+ Ni: công suất tiêu hao để thắng lực cản
dốc. Với: Ni = G.v.sin
Giả sử góc nghiêng tối đa là 30o
Ni = G.v.sin = 80.0,2.sin30 = 8 (W)
+ Nj: công suất tiêu hao để thắng lực cản
quán tính.
Nj =
G
g
.v.j.
i
G
g
= m: khối lượng của robot;
g: gia tốc trọng trường,
j: gia tốc của robot m2/s;
: hệ số kể đến ảnh hưởng của các khối
lượng quay của các chi tiết trong
động cơ.
(quán tính) [2]:
Nj =
G
g
.v.j.
i =
80
10
.0,2.0,5.85= 68 (W).
+ Nr: công suất tiêu hao cho ma sát trong
hệ thống truyền lực:
Nr = 0,1. Nj = 0,1.68= 6,8 (W).
R: lực tiêu hao để thắng lực cản nước:
R = 0,5. C..v2.S.
C: hệ số cản phụ thuộc hình dáng robot:
C = 0,86
S: diện tích hình chiếu lên mặt phẳng
vuông góc với hướng chuyển động.
(trường hợp robot ngập trong nước)
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
141
S = 0,4.0,3 = 0,012 (m2)
: khối lượng riêng của nước kg/m3
( = 10000 N/m3).
v: vận tốc của robot v = 0,2 m/s.
Công suất tiêu hao thắng lực cản nước:
Nw = R.v = 2,064(W)
Ne = Nf
Ni + Nw
Nj + Nr
= 5,6 + 8 + 2,064 + 68 + 6,8 = 90,464 (W)
Công suất yêu cầu của động cơ tại bánh xe
Nk =
Ne 90,464
0,7
= 129,2(W)
: hiệu suất của hệ thống truyền lực;
Nk : công suất phát của động cơ tại bánh xe.
Ta chọn được công suất cho động cơ dẫn
động là 150W.
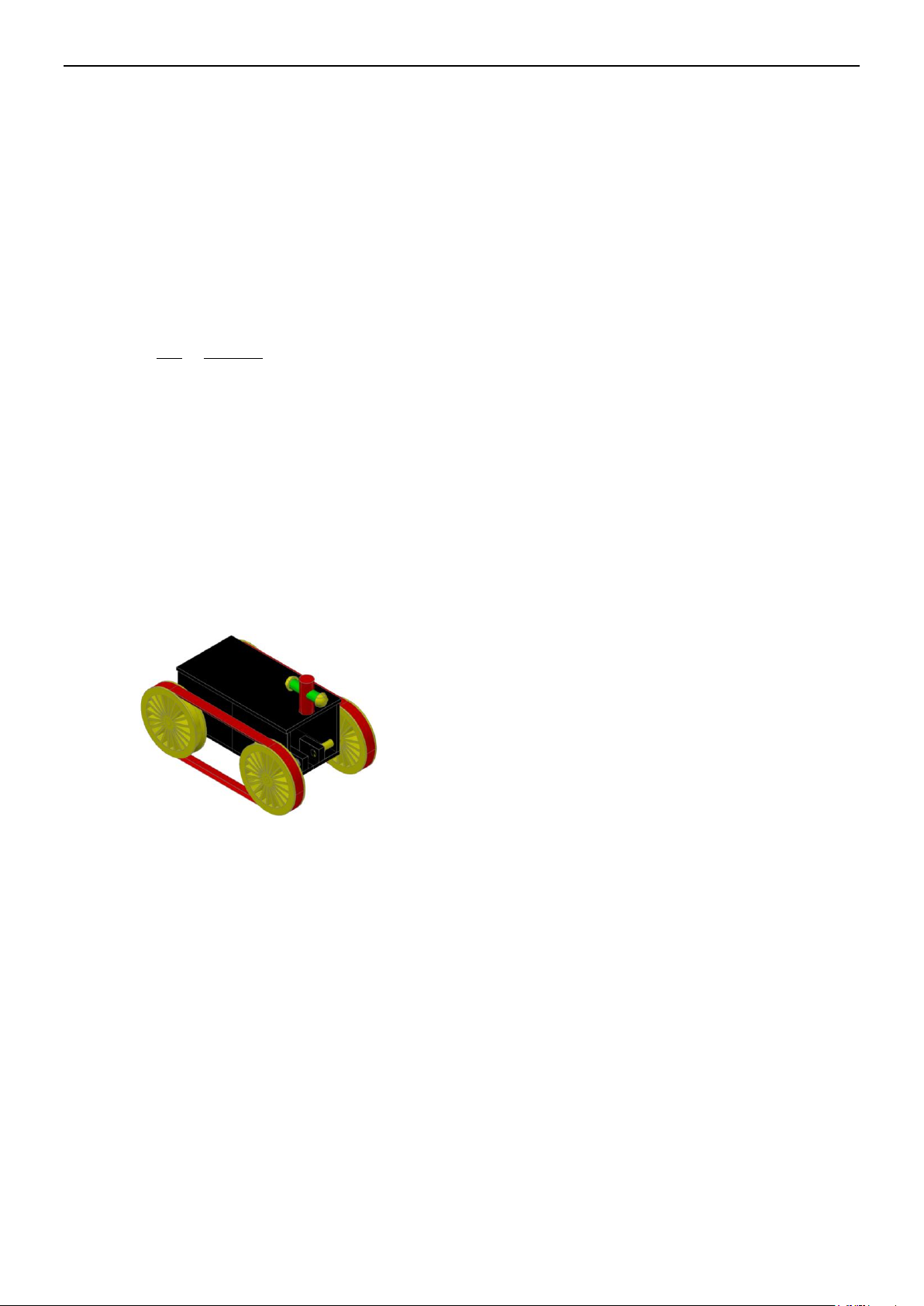
c) Thiết kế chi tiết robot
Robot được thiết kế theo kích thước và kết
cấu theo yêu cầu phân tích nêu trên. Hình
chiếu trục đo như hình 3.
Hình 3. Hình chiếu trục đo
4. KẾT LUẬN
Báo cáo đã đưa ra được cấu hình robot phù
hợp đồng thời tính toán được công suất yêu
cầu của động cơ dẫn động chính. Thiết kế
chi tiết cấu trúc theo hình chiếu tục đo robot
Làm tiền đề cho các bước thiết kế sau này.
5. TÀI LIỆU THAM KHẢO
[1] Nguyễn Hùng, ĐHSPKT TP HCM. Xe hơi
và lực cản lăn, Báo cáo khoa học, 2012.
[2] Se-gon Roh and Hyouk Ryeol Choi.
Differential-Drive Robot for Moving Inside
Urban Gas Pipelines. IEEE, 2005.
[3] Nguyễn Hữu Cẩn. Lý thuyết ô tô máy kéo,
NXB KHKT, 2005.

Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
142

















![Đề thi Kỹ thuật lập trình PLC: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260121/lionelmessi01/135x160/85491768986870.jpg)

![Đề thi cuối học kì 1 môn Máy và hệ thống điều khiển số năm 2025-2026 [Kèm đáp án chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/dangnhuy09/135x160/4401768640586.jpg)




![Tự Động Hóa Thủy Khí: Nguyên Lý và Ứng Dụng [Chi Tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kexauxi10/135x160/27411767988161.jpg)
