1
Ch ng 4ươ
Đi U KHI N T C ĐỀ Ể Ố Ộ
Đ NG C KHÔNG Đ NG BỘ Ơ Ồ Ộ

2
Đ ng c không đ ng bộ ơ ồ ộ
Đ ng c không đ ng bộ ơ ồ ộ 3 pha g m 2 lo i:ồ ạ
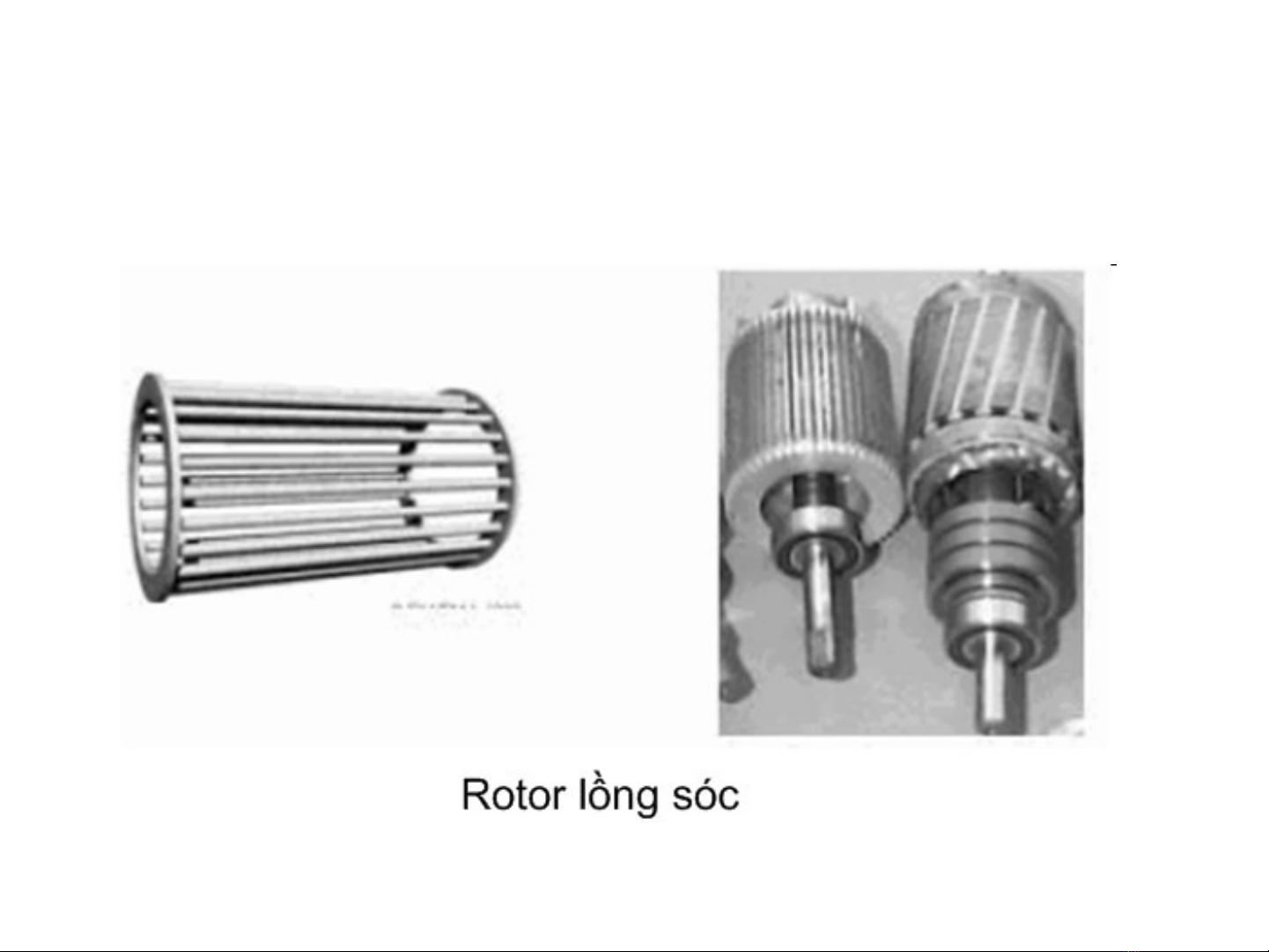
• Rotor l ng sócồ
• Rotor dây qu nấ
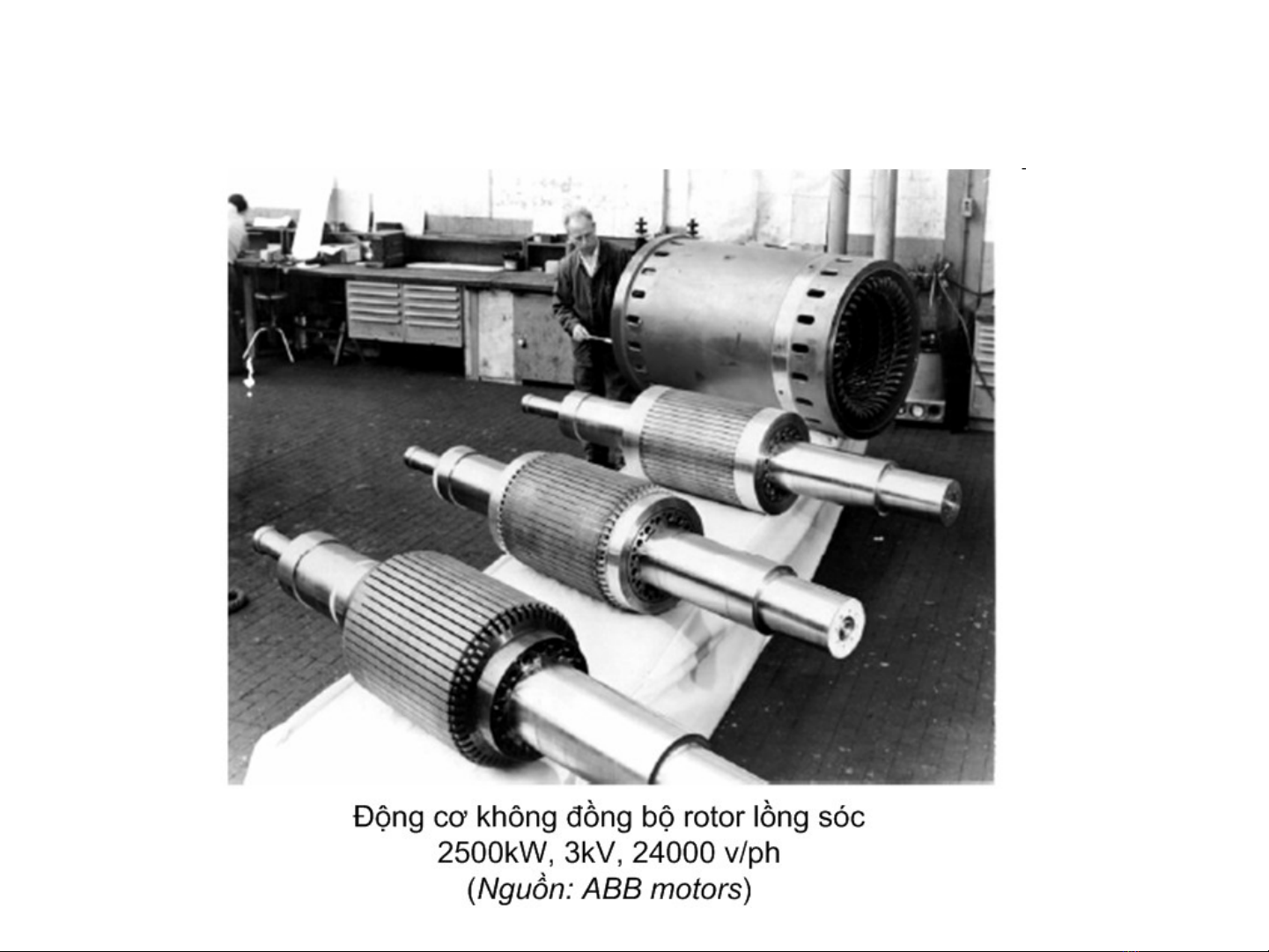
Đ ng c không đ ng b ộ ơ ồ ộ 3 pha rotor l ng sóc ồ
90kW, 1484v/ph, 630kg
(Ngu nồ: ABB motors)
3
Đ ng c không đ ng bộ ơ ồ ộ
4
Đ ng c không đ ng bộ ơ ồ ộ

5
Đ ng c không đ ng bộ ơ ồ ộ
![Điện động cơ [Thông tin chi tiết/Hướng dẫn/Kinh nghiệm chọn mua]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20200622/phattm96/135x160/7801592835481.jpg)



![Bài giảng Aptomat [mô tả/hướng dẫn/kinh nghiệm sử dụng chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20150205/tinhyeukhongdo_2012/135x160/3711423149723.jpg)


![Bài giảng Accu khởi động ĐH Công nghệ Đồng Nai [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2014/20140409/mnhat91/135x160/6501397088197.jpg)












![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
![Câu hỏi ôn tập Cơ sở xử lý ảnh số [năm] chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250710/kimphuong1001/135x160/84701752136985.jpg)

![Câu hỏi ôn tập Robot công nghiệp [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kimphuong555/135x160/7711751422232.jpg)
