
1
Chương 2. Mô tảtóan học.
Điều khiển tự động
I. Hàm truyền và đáp ứng
1. Hàm Truyền
)(
)(
...
)()(
01
1
1tca
dt
tdc
a
dt
tcd
a
dt
tcd
a
n
n
n
n
)(
)(
...
)()(
01
1
1trb
dt
tdr
b
dt
trd
b
dt
trd
b
m
m
m
m
Biếnđổi Laplace:
)(...
0
1
1
1
pCapapapa n
n
n
n
)(...
0
1
1
1
pRbpbpbpb m
m
m
m
Hàm truyềnđạt:
0
1
1
1
01
1
1
...
...
)(
)(
)( apapapa
bpbpbpb
pR
pC
pM n
n
n
n
m
m
m
m
2
Chương 2. Mô tảtóan học.
Điều khiển tự động
Khi biếtđược hàm truyềnđạt có thểxác định đáp ứng c(t) đối với
kích thích r(t) bằng cách lấy Laplace ngược
)().()()( 11 pMpRLpCLtc
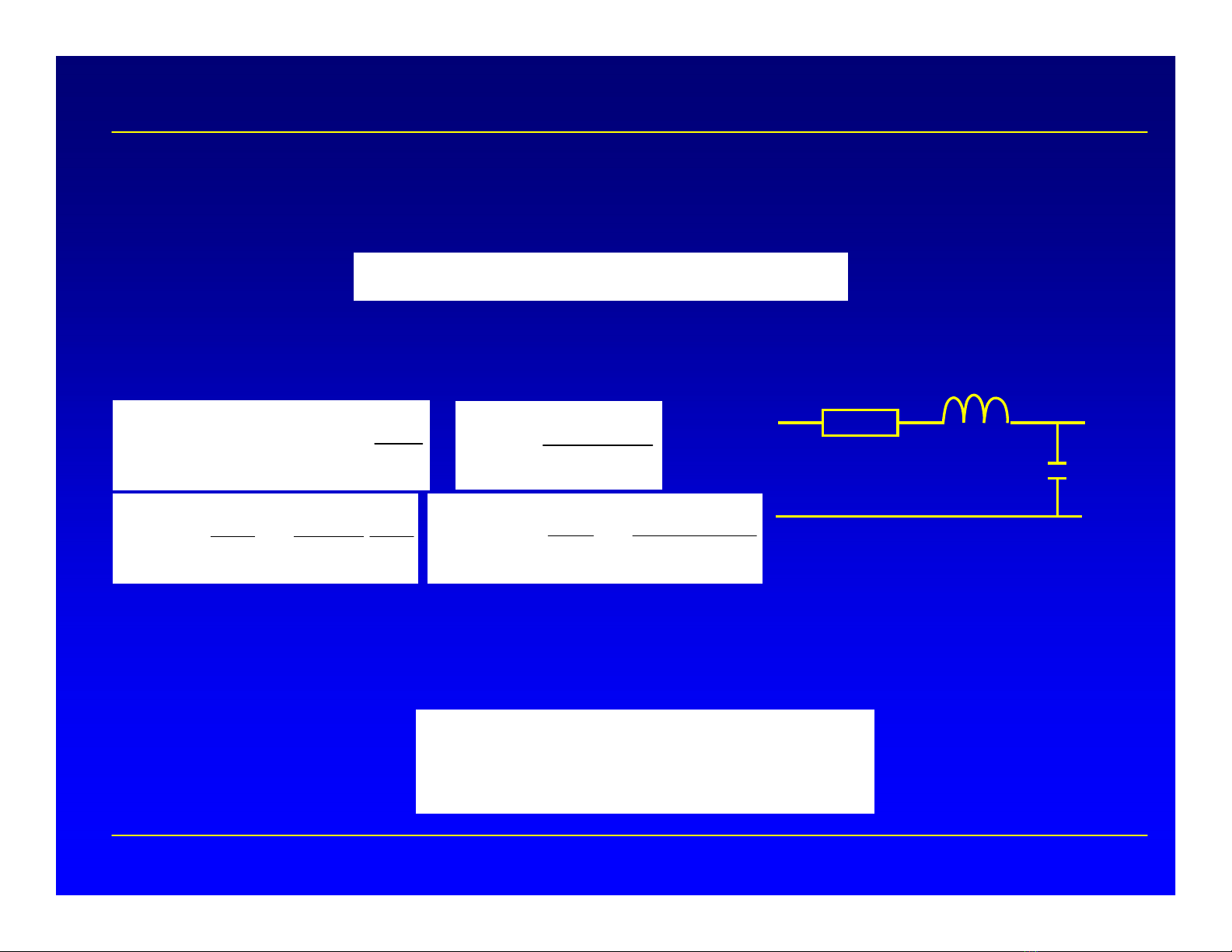
Ví dụ:
C
L
R
UiUo
Tìm haøm truyeàn ñaït cuûa maïch ñieän sau
CppZ
U
Cp
IU i
1
)(
1
0
Cp
LpRpZ 1
)( )( pZ
U
Ii
CppZU
U
pG
i)(
1
)( 0
2. Đáp ứng
+ Đáp ứng xung: đáp ứng của hệthống khi tín hiệu vào là tín hiệu xung
00
0
)()( tkhi
tkhi
ttr
3
Chương 2. Mô tảtóan học.
Điều khiển tự động
+ Đáp ứng bước: đáp ứng của hệthống khi tín hiệu vào là tín hiệubước
00
01
)(1)( tkhi
tkhi
ttr
)(
1
)()( 11 pM
p
LpCLtcs
Biếnđổi Laplace của r(t) : R(p) = 1/p.
Đáp ứng bước :
Biếnđổi Laplace của r(t) : R(p) = 1.
Đáp ứng xung :
)()()(
1
1
pMLpCLtc
i
)(
1
pF
p
fdtL
Áp dụng tính chất của biếnđổi
Laplace:
Ta có
dttctchay
dt
tdc
tc is
s
i)()(
)
(
)(
4
Chương 2. Mô tảtóan học.
Điều khiển tự động
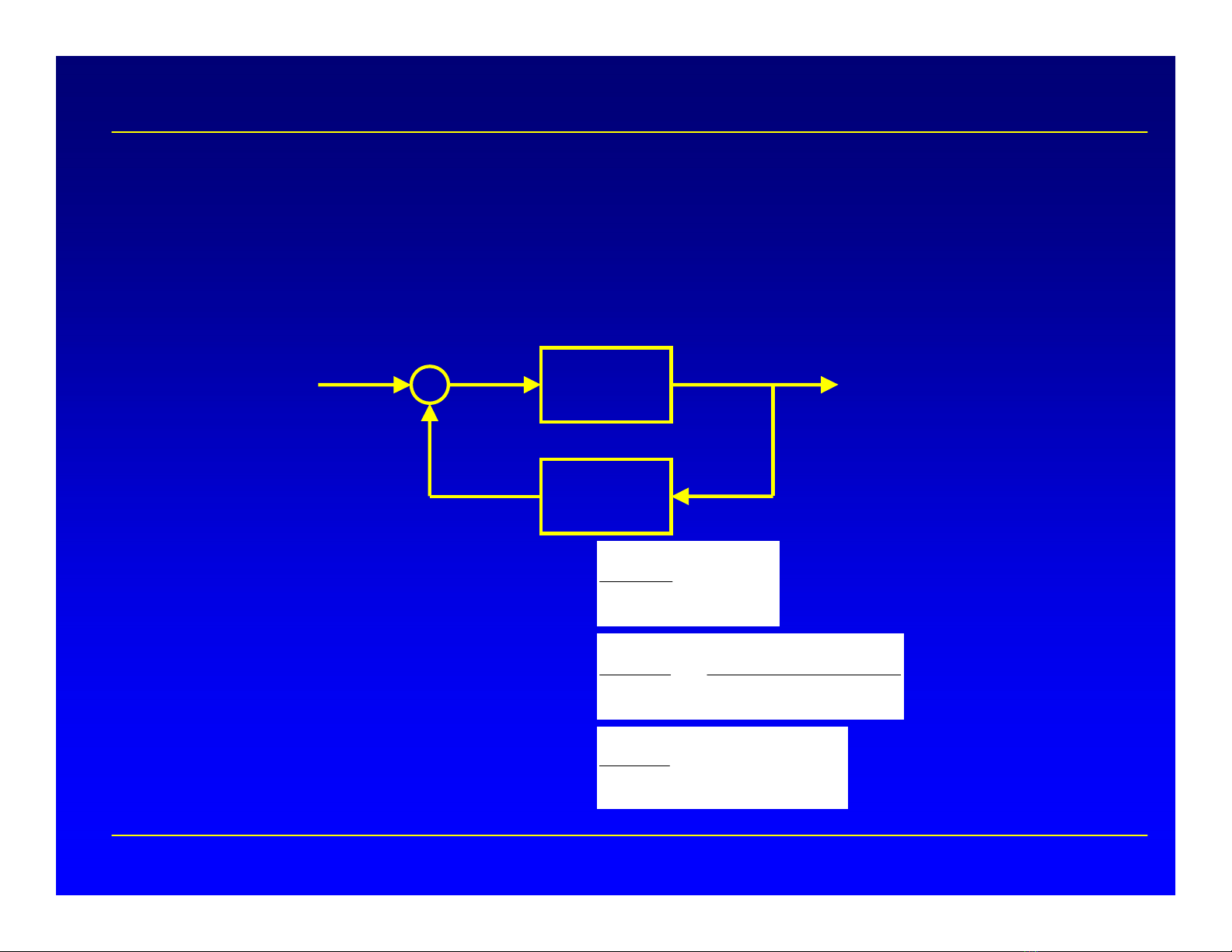
II.Sơ đồ khối và Graph tín hiệu.
1. Sơ đồ khối.
Sơ đồ khốicơ bản của hệthống kín có hồi tiếp:
G(p) C(p)R(p)
H(p)
-
+
E(p)
B(p)
Hàm truyềnđường thuận
Hàm truyền vòng kín
Hàm truyền vòng hở
)(
)(
)
(
pG
pE
p
C
)()(1
)
(
)(
)
(
pHpG
p
G
pR
p
C
)()(
)(
)
(
pHpG
pB
p
E
5
Chương 2. Mô tảtóan học.
Điều khiển tự động
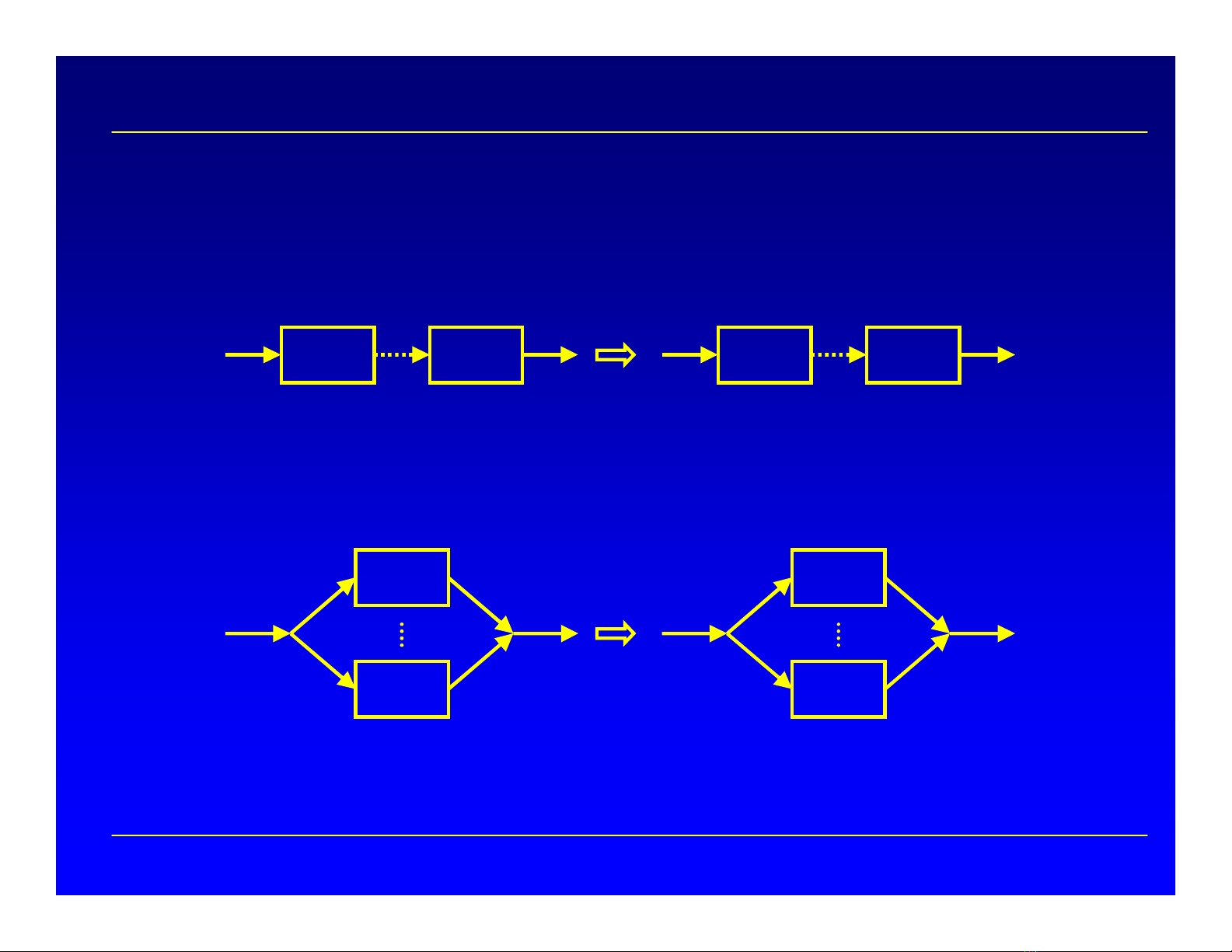
Các phép biếnđổi khốicơ bản:
+ Phép giao hóan các khối nối tiếp
G1GnGnG1
G(p)=G1(p).G2(p)….Gn(p)
+ Phép giao hóan các khối song song
G1
Gn
Gn
G1
G(p)=G1(p) + G2(p) + …+ Gn(p)



![Bài giảng Đại số sơ cấp [năm] - Tài liệu, bài tập, kinh nghiệm học](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260206/hoahongdo0906/135x160/1341770475379.jpg)

















![Bài giảng Giải tích hàm nhiều biến [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260508/vispacex_27/135x160/91991778472930.jpg)




%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)