Giáo án s :ố S ti t:01ố ế T ng s ti t đã gi ng: 06ổ ố ế ả
L pớĐH - C đi n tơ ệ ử
Ngày th c hi nự ệ
- Tên bài h cọ: Các h t a đ c s và ma tr n quayệ ọ ộ ơ ở ậ
- M c đích ụ: Trang b cho sinh viên ki n th c c b n v các các h t a đị ế ứ ơ ả ề ệ ọ ộ
thu n nh t, phép phép bi n đi thu n nh t, rèn cho sinh viên c n th n, rõ ràngầ ấ ế ổ ầ ấ ẩ ậ
khi vi t các ký hi u và l p ma tr n bi n đi thu n nh tế ệ ậ ậ ế ổ ầ ấ
- Yêu c u ầ: Sau bài h c sinh viên c n ph iọ ầ ả
oTrình bày đc tác d ng c a h t a đ thu n nh tượ ụ ủ ệ ọ ộ ầ ấ
oThi t l p đc các ma tr n bi n đi thu n nh tế ậ ượ ậ ế ổ ầ ấ
oGi i đc các bài toán đng h c thu n s d ng phép bi n điả ượ ộ ọ ậ ử ụ ế ổ
thu n nh t ầ ấ
I. n đnh l p: Ổ ị ớ Th i gian: 2 phútờ
N i dung c n nh c nh : ộ ầ ắ ở .………………………………………………….
…………………………………
………………………….…………………………………………………………
………………………….…………………………………………………………
II. Ki m tra bài cũ: ể Th i gian : 0 phútờ
Tên SV
L pớ
Đi mể
Câu h i ki m tra: ỏ ể
III. Gi ng bài m i:ả ớ
- Đ dùng d y h c: ồ ạ ọ
oMáy chi u, máy tínhế
oGiáo án, slide bài gi ngả
oPh n vi t, b ngấ ế ả
oĐ c ng bài gi ng, s tay gi ng viênề ươ ả ổ ả
1
oTài li u tham kh oệ ả
- N i dung, ph ng pháp.ộ ươ
TT N i dung gi ng d yộ ả ạ Th iờ
gian
(phút)
Ph ng pháp th cươ ự
hi nệ
1
2.2.1 Đt v n đặ ấ ề
Lý do c n ph i có h t a đ thu nầ ả ệ ọ ộ ầ
nh tấ
15
Thuy t trình, gi ngế ả
gi i, minh hoả ạ
b ng hình nh,ằ ả
pháp v nấ
2
2.2.2 Phép bi n đi thu n nh tế ổ ầ ấ
a/ Các h t a đ thu n nh t ệ ọ ộ ầ ấ
b/ Phép bi n đi thu n nh t ế ổ ầ ấ
17
Thuy t trình, gi ngế ả
gi i minh h a b ngả ọ ằ
hình nh, pháp v nả ấ
32.2.3 Các tr ng h p riêng c a phép ườ ợ ủ
bi n đi thu n nh tế ổ ầ ấ
a/ Phép quay thu n túy ầ
b/ Phép t nh ti n thu n túy ị ế ầ
IV. T ng k t bài:ổ ế Th i gian: 2 phútờ
Nh n m nh các n i dung chính c a bàiấ ạ ộ ủ
- Lý do c n đn các h t a đ thu n nh t và phép bi n đi thu n nh tầ ế ệ ọ ộ ầ ấ ế ổ ầ ấ
- C u trúc c a m t ma tr n bi n đi thu n nh tấ ủ ộ ậ ế ổ ầ ấ
- Các tr ng h p riêng c a ma tr n bi n đi thu n nh tườ ợ ủ ậ ế ổ ầ ấ
V. Câu h i và bài t pỏ ậ : Th i gian: 2 phútờ
……………….…………………………………………………………….………
………………………………………………………..……………………………
……………….…………………………………………………………….………
2

VI. T đánh giá c a giáo viên v :ự ủ ề Ch t l ng, n i dung, ph ng pháp, th iấ ượ ộ ươ ờ
gian th c hi n bài gi ng trên.ự ệ ả
………………………………………………………..……………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
……………………………………………………………………………………
…………………..
THÔNG QUA B MÔNỘNgày …….tháng ……. năm ……
Ch ký giáo viênữ
3
CH NG II:ƯƠ ĐNG H C TAY MÁYỘ Ọ
2.1. Các h t a đ c s và ma tr n quayệ ọ ộ ơ ở ậ
2.2. Các h t a đ thu n nh t và phép bi n đi thu n nh tệ ọ ộ ầ ấ ế ổ ầ ấ
2.2.1. Đt v n đặ ấ ề
Theo công th c 2.1:ứ
4
2.2.2 Phép bi n đi thu n nh tế ổ ầ ấ
a/ Các h t a đ thu n nh tệ ọ ộ ầ ấ
G i ọ
P
r
là t a đ c a đi m P trong h t a đ Đ Các. ọ ộ ủ ể ệ ọ ộ ề
[ ]
P
T
P P P P P
P
x
r x y z y
z
� �
� �
= =� �
� �
� �
Trong h t a đ thu n nh t ệ ọ ộ ầ ấ
( )P T
r
đc đnh nghĩa nh sau:ượ ị ư
( )
P
P T
r
r
λ
��
=��
��
Trong đó:
λ
là h s t l ệ ố ỉ ệ
Ví dụ :
( )
3 3
1 1
5 5
P P T
r r
λ
��
��
�� ��
�� ��
= =
�� ��
��
�� ��
��
��
b/ Phép bi n đi thu n nh tế ổ ầ ấ
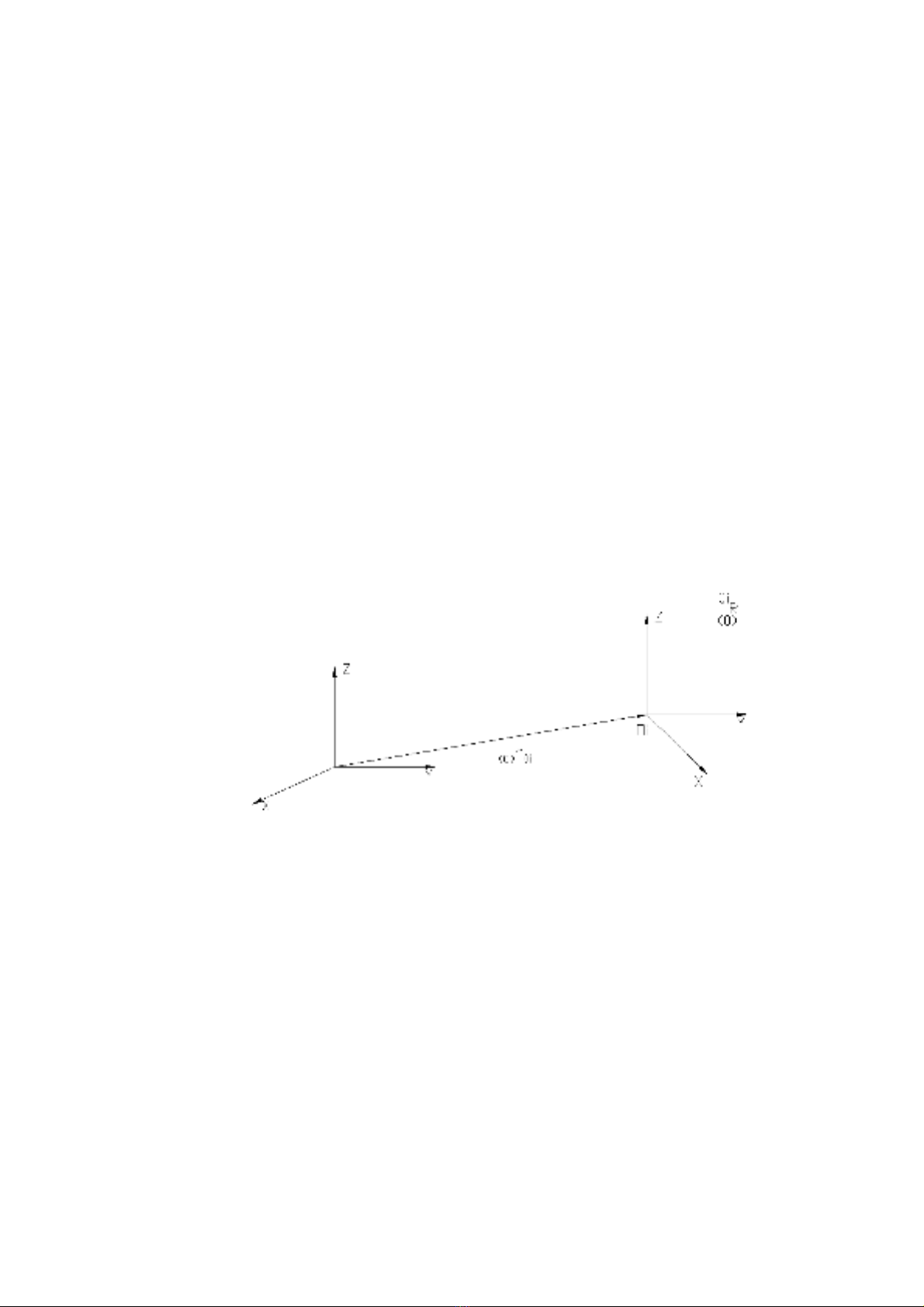
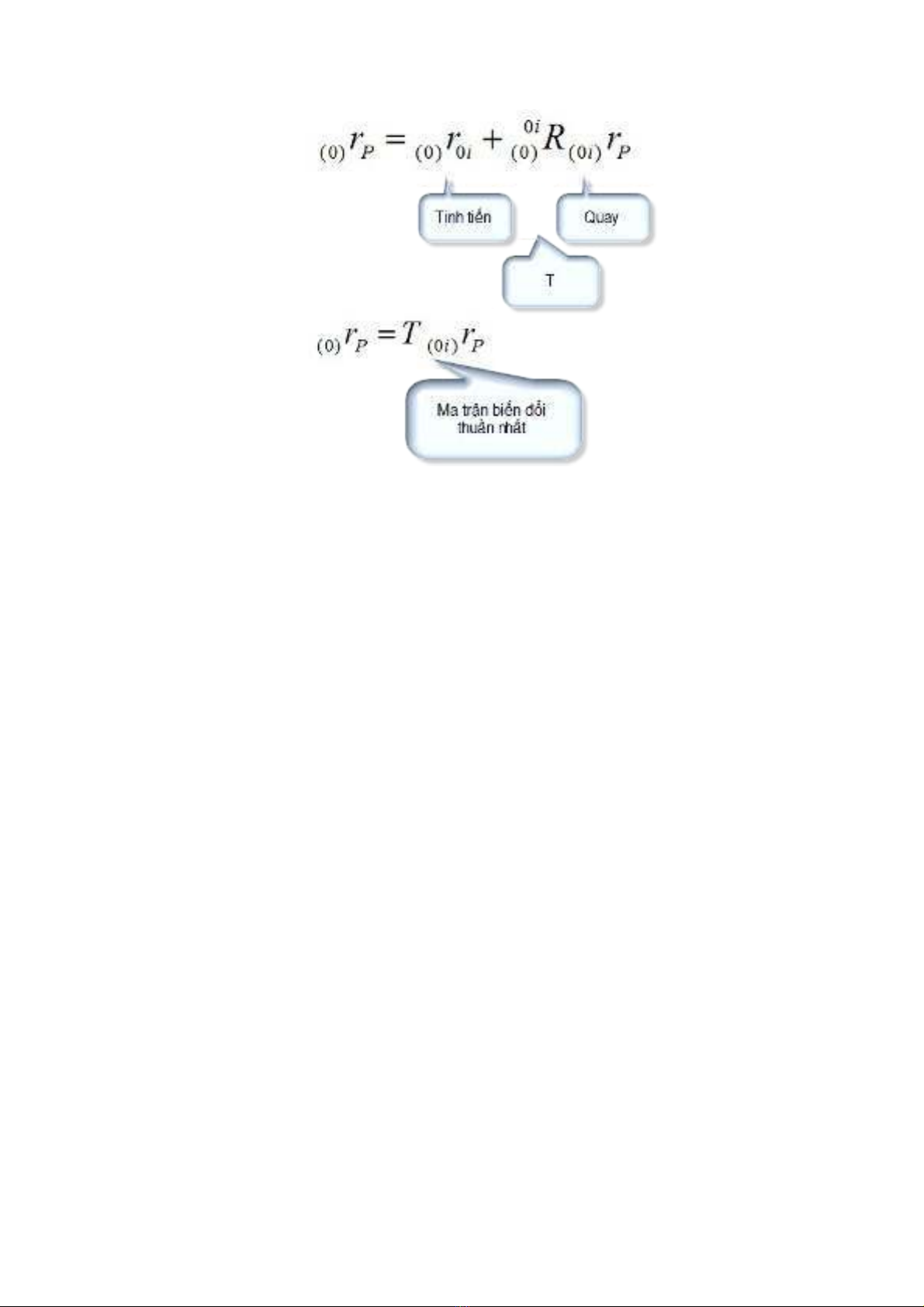
B n ch t c a phép bi n đi thu n nh t là m t phép bi n đi t ng h p gi aả ấ ủ ế ổ ầ ấ ộ ế ổ ổ ợ ữ
phép t nh ti n và phép quay thành m t phép bi n đi duy nh t mô t quan hị ế ộ ế ổ ấ ả ệ
v v trí và h ng gi a các h t a đ trong không gian.ề ị ướ ữ ệ ọ ộ
Quá trình xây d ng phép bi n đi thu n nh t hay ma tr n bi n đi thu nự ế ổ ầ ấ ậ ế ổ ầ
nh t là quá trình t ng h p gi a ma tr n t nh ti n và ma tr n quay thành m t maấ ổ ợ ữ ậ ị ế ậ ộ
tr n chung duy nh t g i là: ma tr n bi n đi thu n nh t.ậ ấ ọ ậ ế ổ ầ ấ
5











![Tài liệu giảng dạy Vi tích phân A2 [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260323/hoatudang2026/135x160/54651774420904.jpg)





![Tài liệu giảng dạy Hình học Affine và Euclide [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260323/hoatudang2026/135x160/52531774414221.jpg)






