DepartmentofAppliedMechanics
CHAPTER Cơhọckỹthuật: ĐỘNGLỰCHỌC
EngineeringMechanics:KINETICS
Độnglựchọc:lực– giatốc
BộmônCơhọcứngdụng
DepartmentofAppliedMechanics
Cơhọckỹthuật
ĐỘNGLỰCHỌC
EngineeringMechanics
KINETICS
ĐỘNGLỰCHỌC:LỰC– GIATỐC
BộmônCơhọcứngdụng
GV:……………………………………..
DepartmentofAppliedMechanics 3
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
ĐỘNGLỰCHỌCCHẤTĐIỂM:Lực–giatốc
1. Phươngtrìnhviphânchuyểnđộngcủachấtđiểm
•Tọađộđềcác
•Tọađộtựnhiên
•Tọađộcực
•Tọađộtrụ
2. Cácbàitoáncơbảncủađộnglựchọc
3. Mộtsốvídụ
DepartmentofAppliedMechanics 4
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
Xuấtpháttừđịnhluật2Newton
() , (,,)
k
dmv F F m const ma F r v t
dt
Trong hệ tọa độ đề các Oxyz cố định:
,(,,)
xyz xxyyzz
axeyeze FrvtFeFeFe
x
y
z
mx F
my F
mz F
xxyyzz
xxyyzz
000
000
(0) , (0) , (0)
(0) , (0) , (0)
x
e
z
e
y
e
m
r
x
z
y
O
F
PTVP CĐ trong hệ tọa độ đề các
Cácđiềukiệnđầuvềvịtrívàvậntốc
1.Phươngtrìnhviphânchuyểnđộngcủachấtđiểm
DepartmentofAppliedMechanics 5
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
1.Phươngtrình viphânchuyểnđộngcủachấtđiểm
PTVPCĐcủachấtđiểmtrongdạngtọađộtựnhiên
O
s(t)ds
r
P0
t
e
b
e
n
e
m
F
2
:, (/)
tn t t n n
aa a a se a s e
2
,/,0
tnb
asv a s a
2
,
/,
0
t
n
b
ms F
mv F
mF
00
(0) , (0)ss sv
Cácđiềukiệnđầuvềvịtrívàvậntốc
DepartmentofAppliedMechanics 6
Độnglựchọccơhệ:Lực–giatốc.Kineticsofamechanicalsystems:Force‐acceleration
1.Phươngtrình viphânchuyểnđộngcủachấtđiểm
PTVPCĐcủachấtđiểmtrongdạngtọađộtrụ
2
()(2)
rz
rr zz
av rr e r re ze
FFe Fe Fe
2
(),
(2),
r
z
mr r F
mr r F
mz F
00
00
00
(0) , (0)
(0) , (0)
(0) , (0)
rr rr
zz zz
Cácđiềukiệnđầuvềvịtrívàvậntốc
m
F
r
OyM
zM
xM
z
r
z
e
r
e
e
DepartmentofAppliedMechanics 7
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
1.Phươngtrình viphânchuyểnđộngcủachấtđiểm
PTVPCĐcủachấtđiểmtrongdạngtọađộcực
2
()(2)
r
rr
av rre r re
FFe Fe
2
(),
(2),
r
mr r F
mr r F
00
00
(0) , (0)
(0) , (0)
rr rr
Cácđiềukiệnđầuvềvịtrívàvậntốc
m
F
r
e
e
x
r
O
DepartmentofAppliedMechanics 8
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
2.Cácbàitoáncơbảncủađộnglựchọcchấtđiểm
Bài toán 1. [Bt thuận]. Cho biết các lực tác dụng lên chất điểm và các điều kiện đầu của chuyển động (vị trí và
vận tốc ban đầu), xác định chuyển động của chất điểm ấy.
Bài toán 2. [Bt ngược]. Cho biết chuyển động của chất điểm, xác định lực tác dụng lên chấtđiểm.
Bài toán 3. [Bt hỗn hợp]. Cho biết một số lực tác dụng (lực hoạt động) và một số thông tin về chuyển động
(như quĩ đạo, vị trí và vận tốc ban đầu), xác định chuyển động của chất điểm và các lực chưa biết (lực liên kết).
ma F r v t(, ,)
Nếuchấtđiểmchịutácdụngcủanhiềulực
ac
kj
FF F=å +å
Quanhệlựcvàgiatốc(chuyểnđộng)như sau
k
FF=å
Đốivớichấtđiểmchịuliênkết
m
F
F1
F2
O
g
a
F
c
F
F
DepartmentofAppliedMechanics 9
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
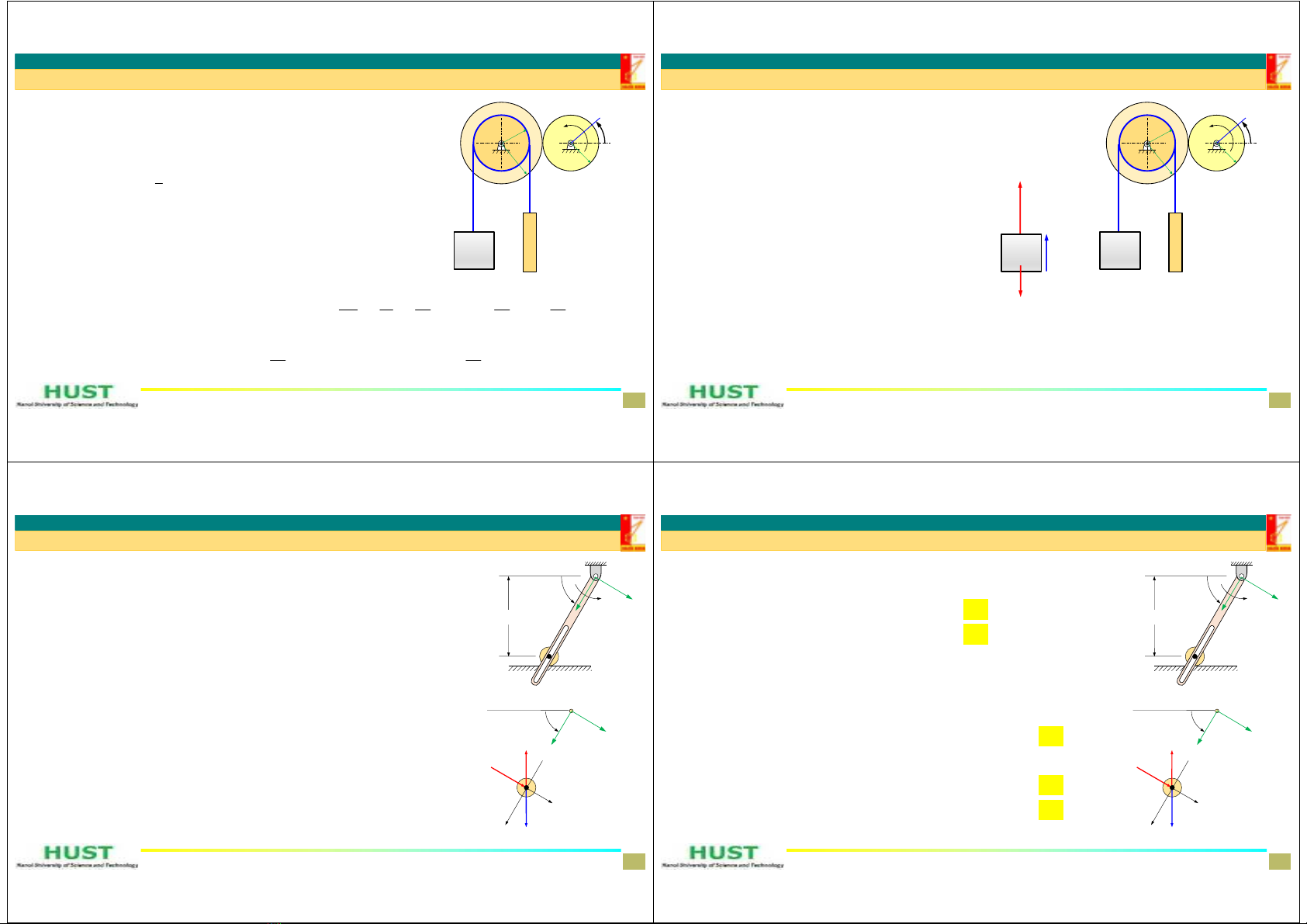
3.Cácvídụápdụng/vídụ1
Ví dụ 1. Mô hình thang máy như trên hình. Động cơ nối vào bánh răng
1(r
1,z
1), truyền động sang bánh răng 2 (r2,z
2). Tang cuốn bán kính r
gắn liền bánh răng 2. Dây cuốn không dãn. Trong giai đoạn mở máy,
bánh răng 1 quay nhanh dần đều
2
1
10 0
2,consttqa a==
21
r1
A
r
r2
B
1
m
XácđịnhlựccăngcáptreocabinA,biếtkhốilượngcabinlàm.
Lờigiải
Phântíchchuyểnđộng:
rz z z
tt
rz z z
12 2 1 1
11 0 2 1 0
21 1 2 2
,w
wqa w w a
w
== == = =
AAA
zz
vr r tavr r
zz
11
20 20
22
wa wa== ===
Tínhgiatốccabin
DepartmentofAppliedMechanics 10
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ1
ma P T
ma T P
TPmaP ag(1 / )
Am
P
T
a
21
r1
A
r
r2
B
1
m
Táchcabinvàviếtquanhệlực‐ giatốcchocabin
Nếugiatốcahướngxuống
TPmaP ag(1 / )
DepartmentofAppliedMechanics 11
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ2
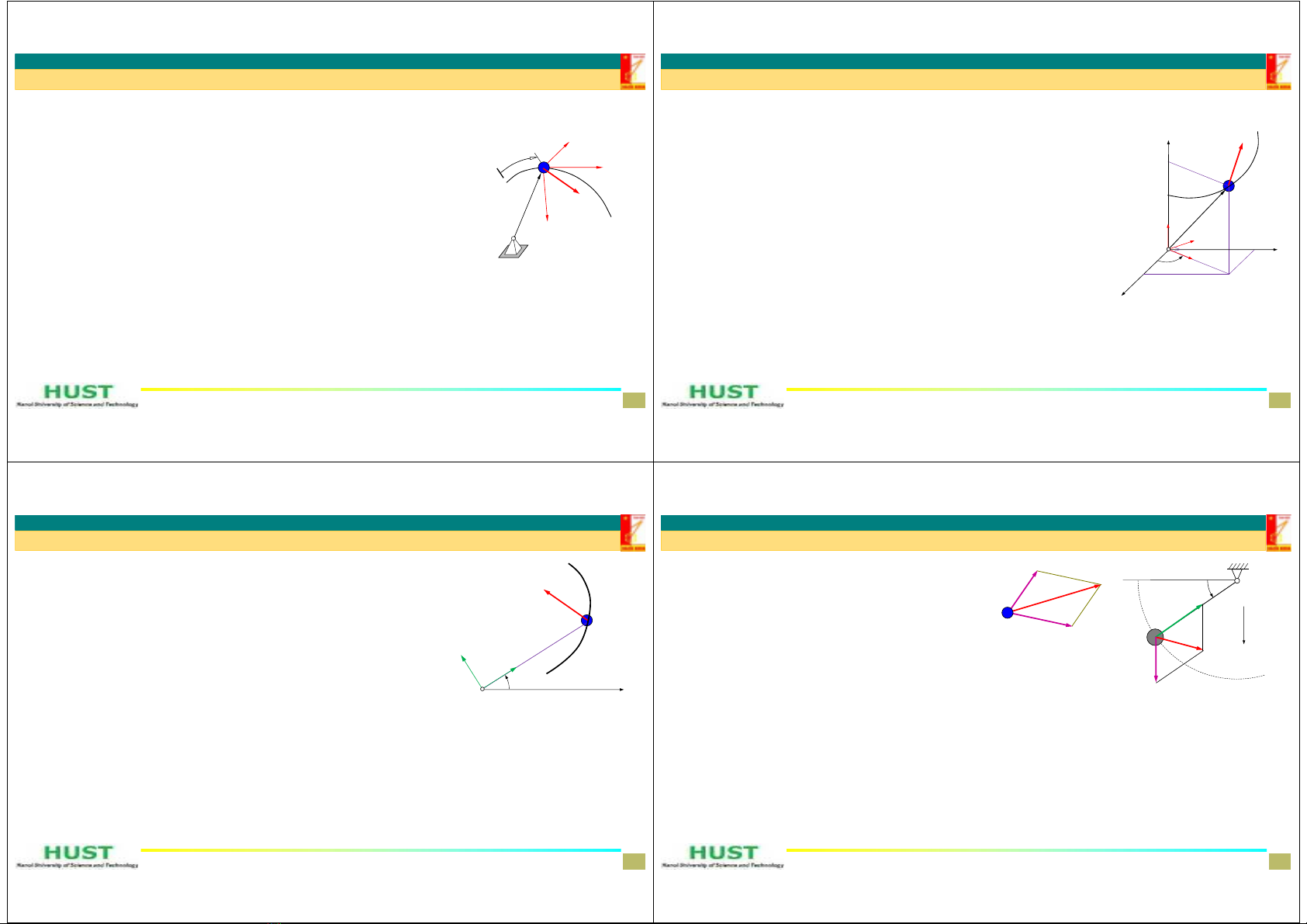
Ví dụ 2. Trụ nhỏ C khối lượng 2‐kg có chốt P đi qua tâm chuyển động trong
rãnh của tay quay OA. Biết rằng tay quay OA chuyển động trong mặt đứng
với vận tốc góc = 0.5 rad/s, hãy xác định lực tác dụng lên trục C (coi như
chất điểm) tại thời điểm =60.
h=0.4m
O
CP
A
r
e
e
Lời giải
Vị trí của C được xác định bởi khoảng cách OC và góc ,dođótasử
dụng tọa độ cực để giải bài toán này.
Sơ đồ giải phóng liên kết
Cáclựctácdụnglêntrụbaogồm:trọnglựcW,phảnlựccủanềnNC,vàlực
FPdo rãnh của OA tác dụng vuông góc OA, chiều được giả sử trước.
Chiều của các thành phần gia tốc arvà aθđược chọn như trên hình.
Ởđâycóbốnẩncầntìmlàar,aθ,FPvà NC.W
NC
Fp
a
ar
r
e
e
O
DepartmentofAppliedMechanics 12
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ2
Phươngtrìnhquanhệlực–giatốc
Từhìnhvẽtaviếtđượccácphươngtrình
Cr
PC
WN a
WFN a
sin sin 2
cos cos 2
h=0.4m
O
CP
A
r
e
e
W
NC
Fp
a
ar
r
e
e
O
Wmg 19.62 N29.81
Động học
r
arr ar r
2,2
Từhìnhvẽtaxácđịnhđượcliênhệgiữarvàθ
Đạohàmhailầnphươngtrìnhliênkếttanhậnđược
rhsin 0
2
sin cos 0,
sin 2 cos cos sin 0
rr
rr r r
(1)
(2)
(4)
(5)
(3)
DepartmentofAppliedMechanics 13
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ2
Từhệ(1)và(2)vớiθ=60chota
NC=19.4N,FP=‐0.356N.
DấutrừchứngtỏrằngFPtácđộngngượcchiềuhìnhvẽ.
0.462,
0.133, 0.192rrr
22
0.192 0.462(0.5) 0.0770
r
arr
0 2( 0.133)(0.5) 02.133ar r
rhsin 0
2
sin cos 0,
sin 2 cos cos sin 0
rr
rr r r
Giảihệbaphươngtrình
với tanhậnđược:
60 , 0.5, 0
Tínhđược:
(4)
(5)
(3)
W
NC
Fp
a
ar
r
e
e
O
Cr
PC
WN a
WFN a
sin sin 2
cos cos 2
Wmg 19.62 N29.81
(1)
(2)
DepartmentofAppliedMechanics 14
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
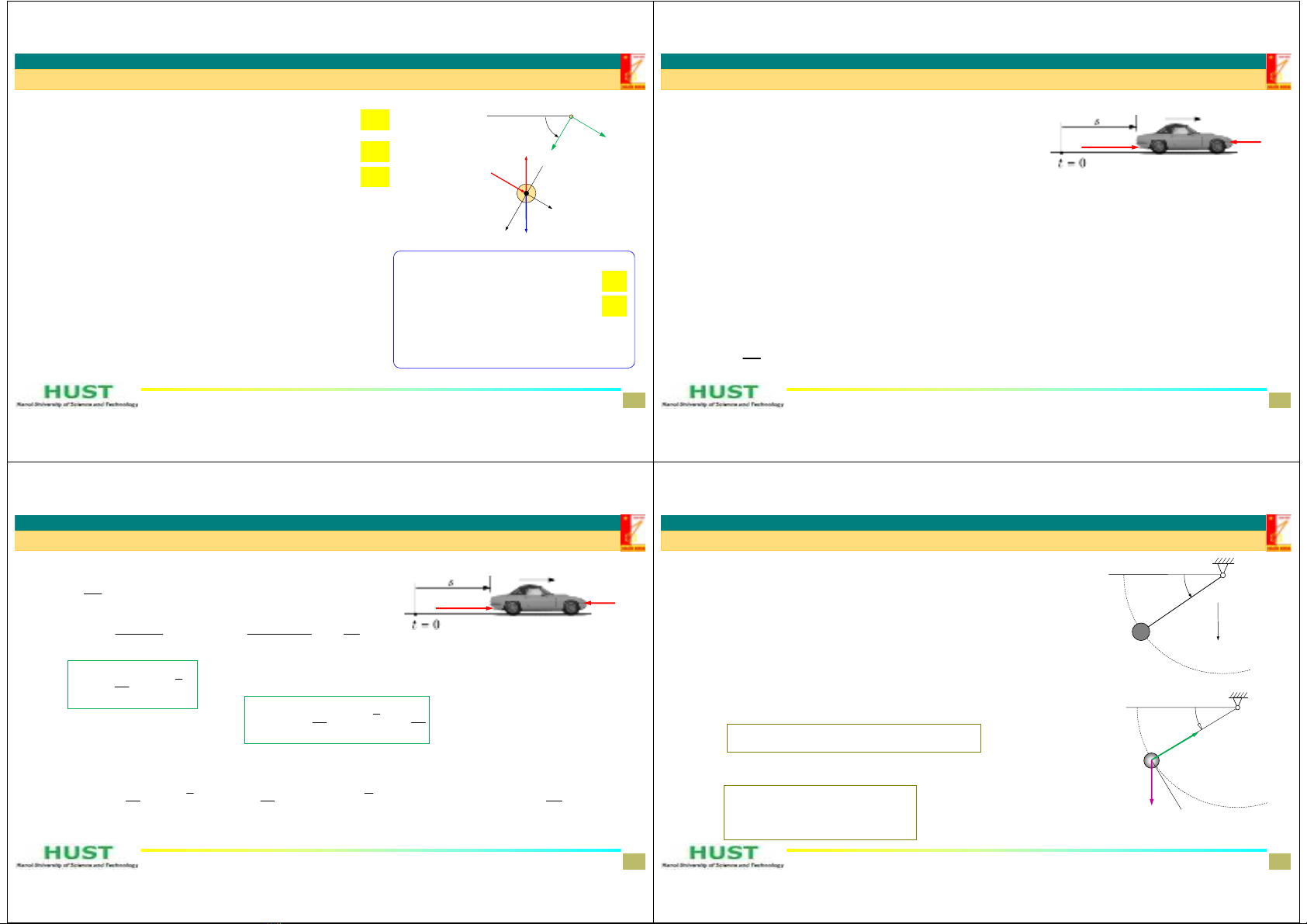
3.Cácvídụápdụng/vídụ3
Lực cản tỷ lệ vận tốc
Ví dụ 3.Xeôtôchuyểnđộngtrênđườngthẳngngangtừ
trạngtháiđứngyêndolựcđẩyP=const,lựccảntỷlệvận
tốcxe.
•Tìmbiểuthứcvậntốccủaxelàhàmtheothờigian.
•TìmkhoảngthờigianTcầnthiếtđểchovậntốcđạtgiátrị
bằng95%giátrịvậntốcgiớihạn.
c
Fkv
m
P
Lờigiải
Phântíchchuyểnđộng:XechuyểnđộngngangdướitácdụngcủahailựcPvàFc.
x
mx F x v t mv P kv(,,) ,
Cầnđigiảiphươngtrình viphânbậcnhấtvớiđiềukiệnđầu
dv
mPkv v
dt ,(0)0
DepartmentofAppliedMechanics 15
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ3
k
mt
P
vt e
k
() (1 )
mdv d P kv k
dt dt
Pkv Pkv m
[]
[]
c
Fkv
m
P
dv
mPkv v
dt ,(0)0
kkS
mm
TT
PP m
vT e e T
kk k
() (1 ) 0.95 0.05 ln20
•Tìm biểu thức vận tốc của xe là hàm theo thời gian
•Tìm khoảng thời gian T cần thiết để cho vận tốc đạt giá trị bằng 95% giá trị vận tốc giới hạn.
•Tìm vận tốc tới hạn của xe
k
mt
gh t
PP
ve
kk
lim (1 )
DepartmentofAppliedMechanics 16
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ4
tn
al a l
2
,,
2
cos
sin
t
n
ma ml P
ma ml T P
m
l
O
g
Vídụ4.Chấtđiểmchịuliênkết(sửdụngtọađộtựnhiên)
Một quả cầu nhỏ khối lượng m được treo vào một dây mềm không
dãn luôn căng chiều dài L đầu kia cố định. Quả cầu được thả từ vị trí
dây ngang không vận tốc ban đầu. Tìm vận tốc của quả cầu phụ thuộc
vị trí của nó và lực căng dây (dây luôn căng).
O
P
T
m
n
Lờigiải
PT,
Phântíchchuyểnđộng:điểmchuyểnđộngtrênđườngtrònđãbiết.Sử
dụngphươngpháptọađộtựnhiên.Cáclựctácdụng
nt
ma P T m a a P T()
DepartmentofAppliedMechanics 17
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ4
Lựccăngdây:
0
2
0
0
1
cos (sin sin )
2
ml d P d ml mg
1
0
2(sin sin)gl
0
2(sin sin )vl gl
2
0
sin (3sin 2sin )Tml P mg
If v gl T mg (0)=0 2 sin , 3 sin
ddd d
dt d dt d
cos cosml P ml d P d
Sửdụnghệthức
Dựavàocácđiềukiệnđầucủachuyểnđộng,tacó:
tn
ma ml P ma ml T P
2
cos , sin
Vậntốcchấtđiểm:
DepartmentofAppliedMechanics 18
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ5
Mộtsốdạngphươngtrình viphânchuyểnđộngcầngiải
mv P kv v,(0)0
mv P kv v
2,(0)0
mx cx kx F t x x x v
000
sin , (0) , (0)
mx kx F t x x x v
000
sin , (0) , (0)
mx kx x x x v
00
, (0) , (0)
mx cx kx x x x v
00
,(0),(0)
n
c
Fkv
m
P
x
k
m
c
F(t)
mx P x x x v
00
, (0) , (0)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
DepartmentofAppliedMechanics 19
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
3.Cácvídụápdụng/vídụ6
A
C
O
B
D
sAsB
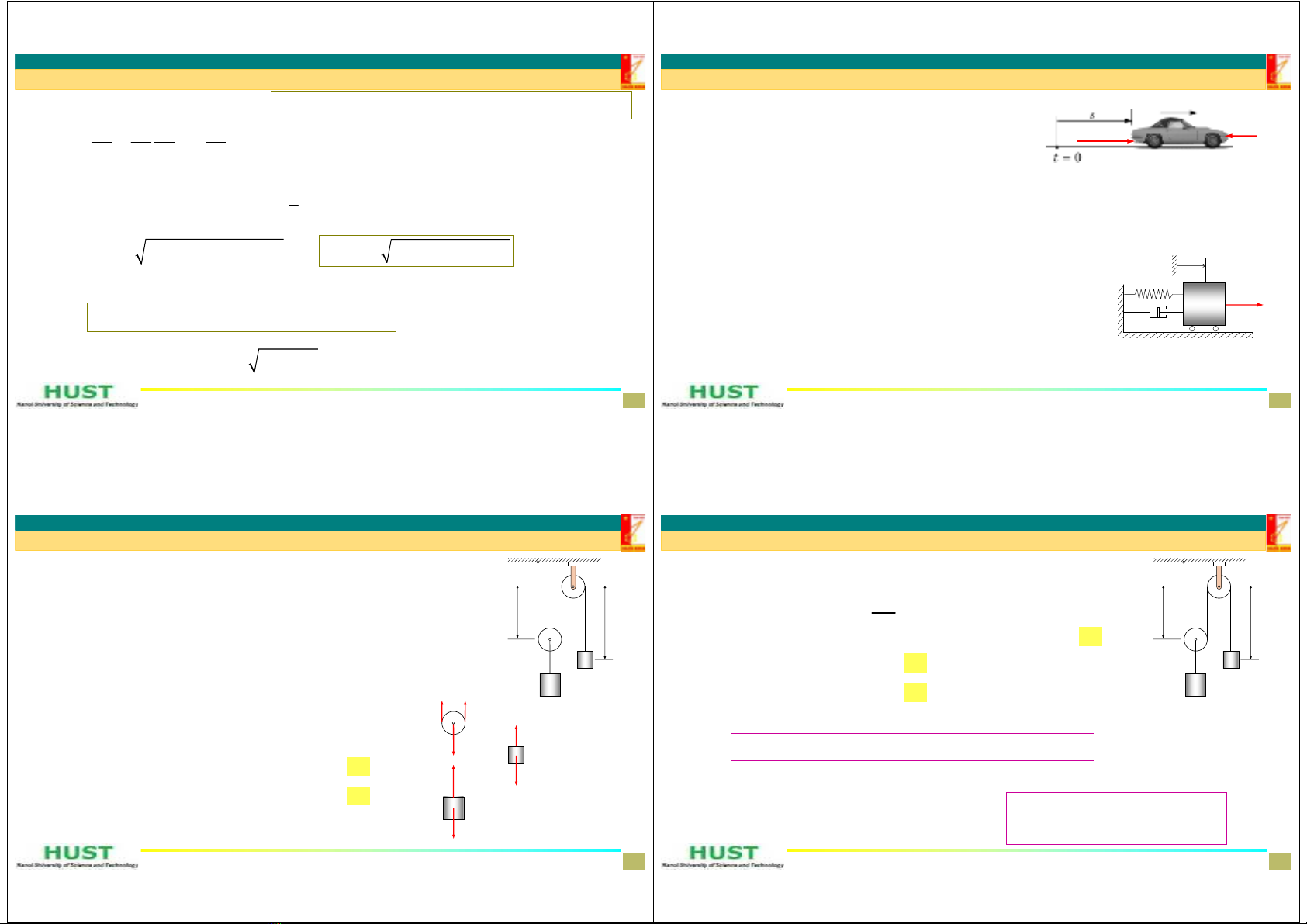
Vídụ6.Hệchấtđiểmchịuliênkết(bỏquakhốilượngpuli).
Vật nặng A khối lượng 100 kg được thả từ trạng thái đứng yên. Nếu bỏ qua khối
lượng các puli và dây, hãy xác định vận tốc của vật nặng B khối lượng 20 kg sau
thời gian 2 giây.
WA
WB
2T
2T
TT
T
Lờigiải
Sơđồgiảiphóngliênkết
Dobỏquakhốilượngcácpuli,nênlựccănglàkhôngđổitrongmỗidây.
GọilựccăngtrongnhánhdâytreovậtBlàT,từsơđồlựctrênpuliCta
suyralựctreovậtAlà2T.BaẩntrongbàitoánnàylàT,aAvàaB.
: 981 2
AA
ma T
:209.81
BB
ma T
VậtA:
VậtB:
Cácphươngtrìnhlực‐giatốc
(1)
(2)
DepartmentofAppliedMechanics 20
Độnglựchọccơ hệ:Lực– giatốc.Kineticsofamechanicalsystems:Force‐ acceleration
AB
d
sslconstdt
2
2
2 (..)
AB
AB
ss
aa
20
20
AB
Ta a
22
327.0 N, 3.27 m/ s , 6.54 m/ s
0
0 ( 6.54)(2) 13.1m/ s
B
vv at
3.Cácvídụápdụng/vídụ6
Độnghọc
Từđiềukiệndâykhôngdãntacóđượcliênhệ(dâyO‐>BdàiL)
NhưvậyvậtAcógiatốchướngxuống,vậtBcógiatốchướnglên.
AA
ma T981 2
BB
ma T20 9.81
Giảihệbaphươngtrìnhtrêntanhậnđược
(3)
(1)
(2)
Cácphươngtrìnhlực‐giatốc
VậttốcvậtBsau2giâyđượcxácđịnhnhưsau:
DấutrừchứngtỏvậtBcóvậntốchướnglên.
A
C
O
B
D
sAsB

























