DepartmentofAppliedMechanics 9
Độnglựchọccơ hệ:Xunglực– độnglượng.Kineticsofamechanicalsystems:Impulse‐ momentum
2.Địnhlýbiếnthiênđộnglượng
b)Đốivớicơhệ
Địnhlý3.Đạohàmtheothờigianđộnglượngcủa
cơhệbằngvéctơchínhcủacácngoạilựctácdụng
lêncơhệ.
Định lý 4. Vi phân động lượng của cơ hệ bằng tổng
hình học xung lượng nguyên tố của các ngoại lực tác
dụng lên cơ hệ.
Định lý 5. Biến thiên động lượng của cơ hệ
trong một khoảng thời gian nào đó bằng tổng
hình học xung lượng của các ngoại lực tác dụng
lên cơ hệ trong khoảng thời gian ấy.
Lưuý:khôngthấysựcómặtcủanộilựctrongđịnhlýđộng
lượng.Nộilựckhônglàmbiếnđổiđộnglượngcủahệ.
e
k
k
dp F
dt
ee
kk
kk
dp dS F dt
2
1
21
() () t
ee
kk
t
kk
pt pt S Fdt
1
()
C
mv t
2
1
te
k
tFdt
2
()
C
mv t
e
Ck
k
ma F
DepartmentofAppliedMechanics 10
Độnglựchọccơ hệ:Xunglực– độnglượng.Kineticsofamechanicalsystems:Impulse‐ momentum
3.Địnhlýbảotoànđộnglượng
0,
e
kC
k
If F p const mv const
Địnhlý6:Nếuvectơchínhcủacácngoạilựctácdụnglêncơhệluônluônbằngkhôngthìđộnglượngcủa
cơhệđượcbảotoàn.
Địnhlý7: Nếuhìnhchiếucủavectơchínhcủacácngoạilựclênmộttrụcnàođóluônluônbằngkhôngthì
hìnhchiếuđộnglượngcủacơhệlêntrụcấyđượcbảotoàn.
0,
e
kx x C
k
If F p const mx const
DepartmentofAppliedMechanics 11
Độnglựchọccơ hệ:Xunglực– độnglượng.Kineticsofamechanicalsystems:Impulse‐ momentum
4.Vídụápdụng
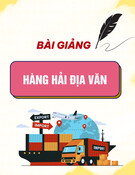
Lực phụ thuộc thời gian P(t)
Ví dụ 1. Xeôtôkhốilượngmkhởi động trên đường thẳng ngang từ
trạngtháiđứngyêndolựcđẩyP=P
0(1‐exp(‐a.t)), với P0,alàconst.
Bỏ qua lực cản. Tìm biểu thức vận tốc của xe là hàm theo thời gian.
m
P
t
xx x x x
d mv F dt mv t mv F dt v
0
( ) ( ) (0) , (0) 0
Lời giải.
Lực phụ thuộc thời gian, nên áp dụng định lý động lượng.
Ở đây chỉ quan tâm phương ngang x.
tt
at at
at
PedtPtea
Pt e a P a
00
0
0
00
(1 ) ( / )
(/)/
t
xx x
tat
x
mv t mv F dt
mv P e dt
0
0
0
() (0)
(0) (1 )
at
xx
vt v Pt e a P a
m00
1
() (0) ( / ) /
x
y
DepartmentofAppliedMechanics 12
Độnglựchọccơ hệ:Xunglực– độnglượng.Kineticsofamechanicalsystems:Impulse‐ momentum
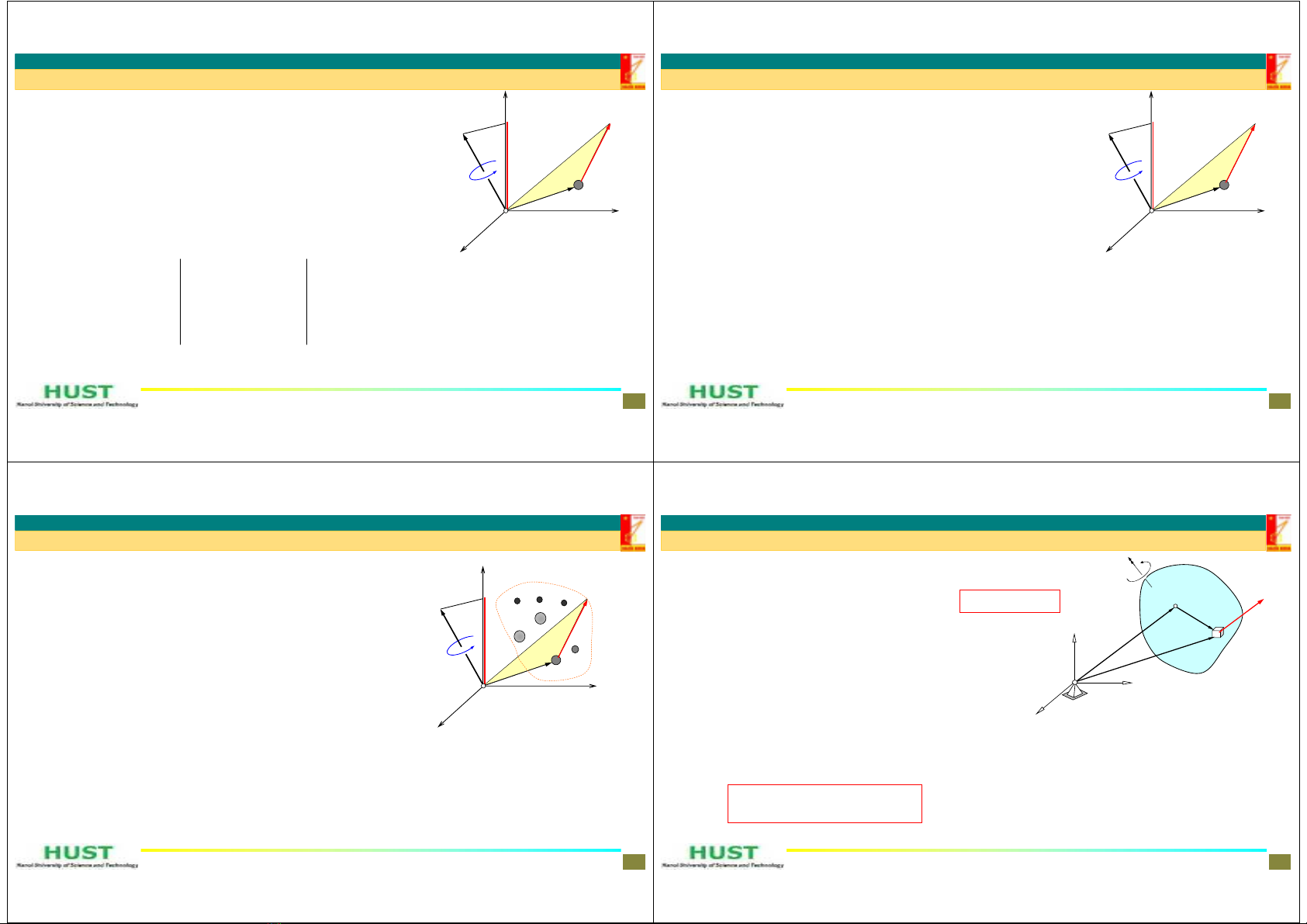
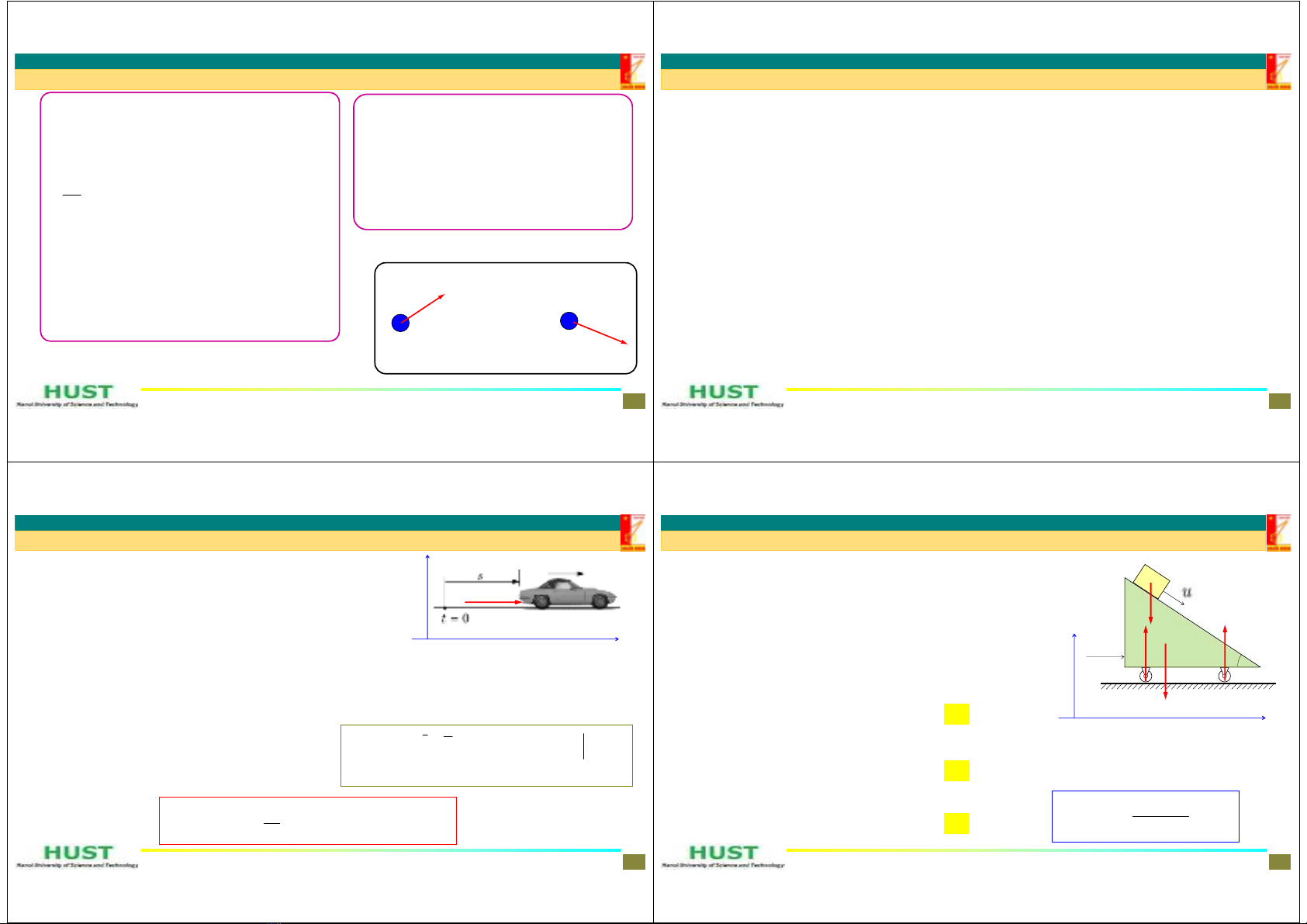
4.Vídụápdụng
Vídụ2.Bảotoànđộnglượng.ChocơhệgồmvậtAcókhốilượngm1đặt
trênmặtnghiêngcủamộtlăngtrụcókhốilượngm2.Gócnghiêngcủa
mặtlăngtrụvớimặtphẳngnganglà.Lăngtrụđượcđặttrênmộtmặt
ngangnhẵnnhưhìnhvẽ.Banđầuvậtnặngnằmyêntươngđốitrênmặt
lăngtrụ,cònchínhlăngtrụthìtrượtngangsangphảivớivậntốcv0.Sau
đóchovậtAtrượtxuốngtheomặtphẳngnghiêngcủalăngtrụvớivận
tốctươngđốiu=at.Tìmvậntốccủalăngtrụ.
v0
u
A
m1
m2
m
vv u
mm
1
0
12
cos a= - +
HD: Các ngoại lực tác dụng lên hệ: P1,P
2,N
1,N
2
e
kx x x
Fpconstp
,0(0)å== =
xxx
pmv mv
mmv
11 22
120
(0) (0) (0)
()
(1)
(2)
xxx
pt mv t mv t
mvt u mvt
11 22
12
() () ()
(() cos ) ()a
=+
=+ + (3)
x
y
P2
P1
N1
N2