
NHÓM 2 – ĐƯỜNG CONG SPLINE BẬC BA
Nguyễn Việt Huy G0800800
NguyễnVăn Giáp NhỏG0804467
Cao Tấn Công G0804079
Ngô Hoàng Sang G0801780
Dương Mười G0801290
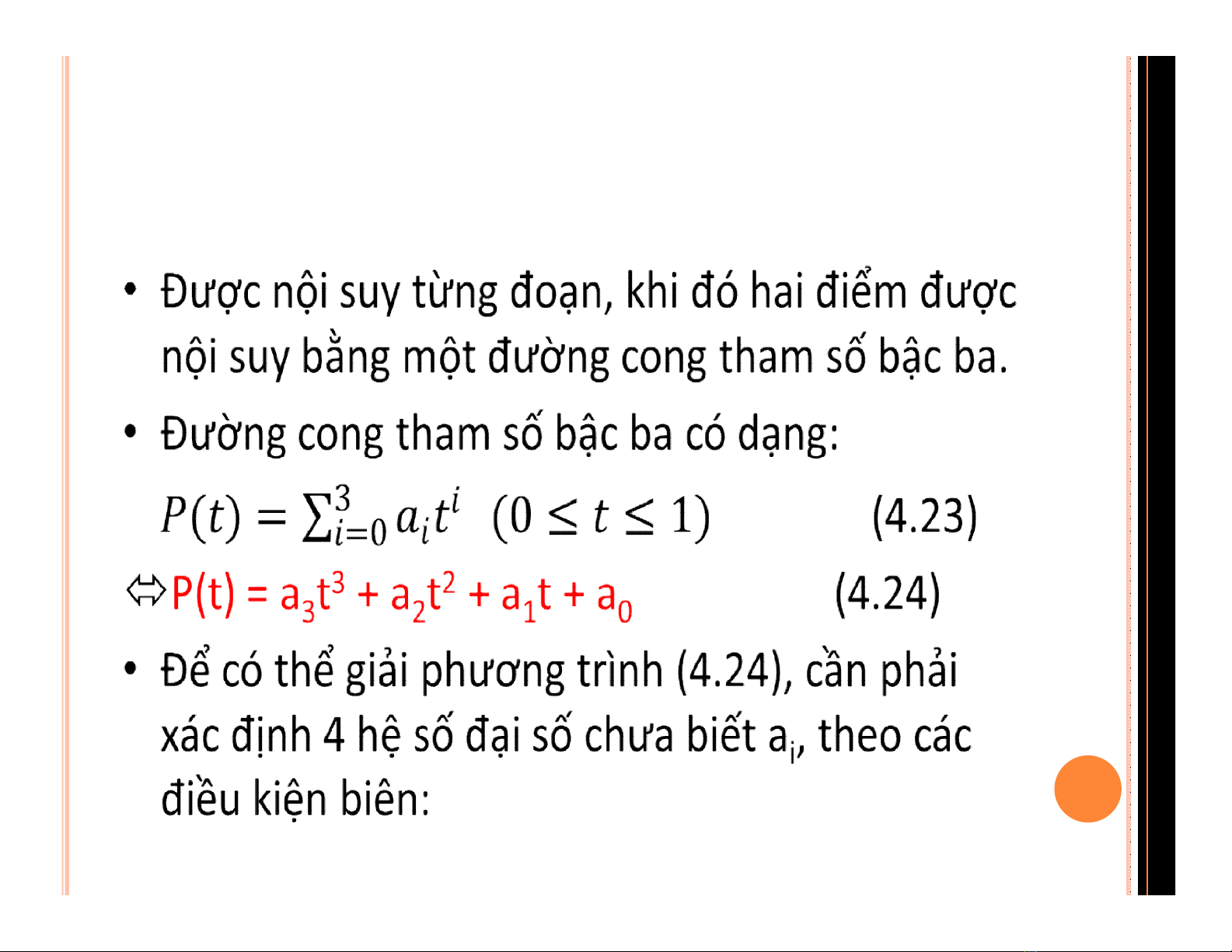
ĐƯỜNG CONG THAM SỐBẬC BA:

ĐƯỜNG CONG THAM SỐBẬC BA:
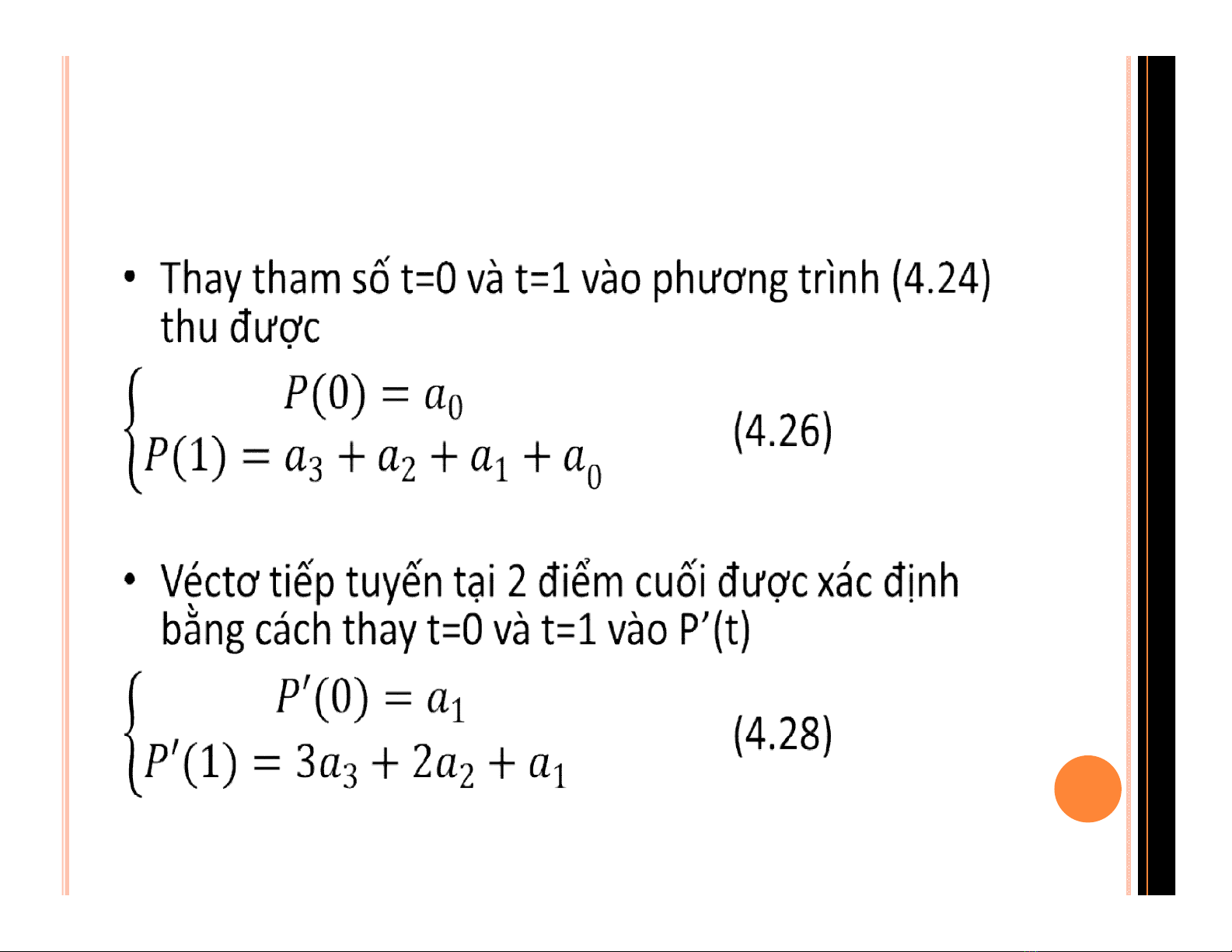
Hai phương trình thu được từtọađộ2 điểmđầu
và cuối của mỗi phân đoạn.
Hai phương trình còn lạiđược xác định bằng các
véctơtiếp tuyến tại mộtđiểmđầu và cuối của mỗi
phân đoạn. (H.4.13)
ĐƯỜNG CONG THAM SỐBẬC BA:
ĐƯỜNG CONG THAM SỐBẬC BA:
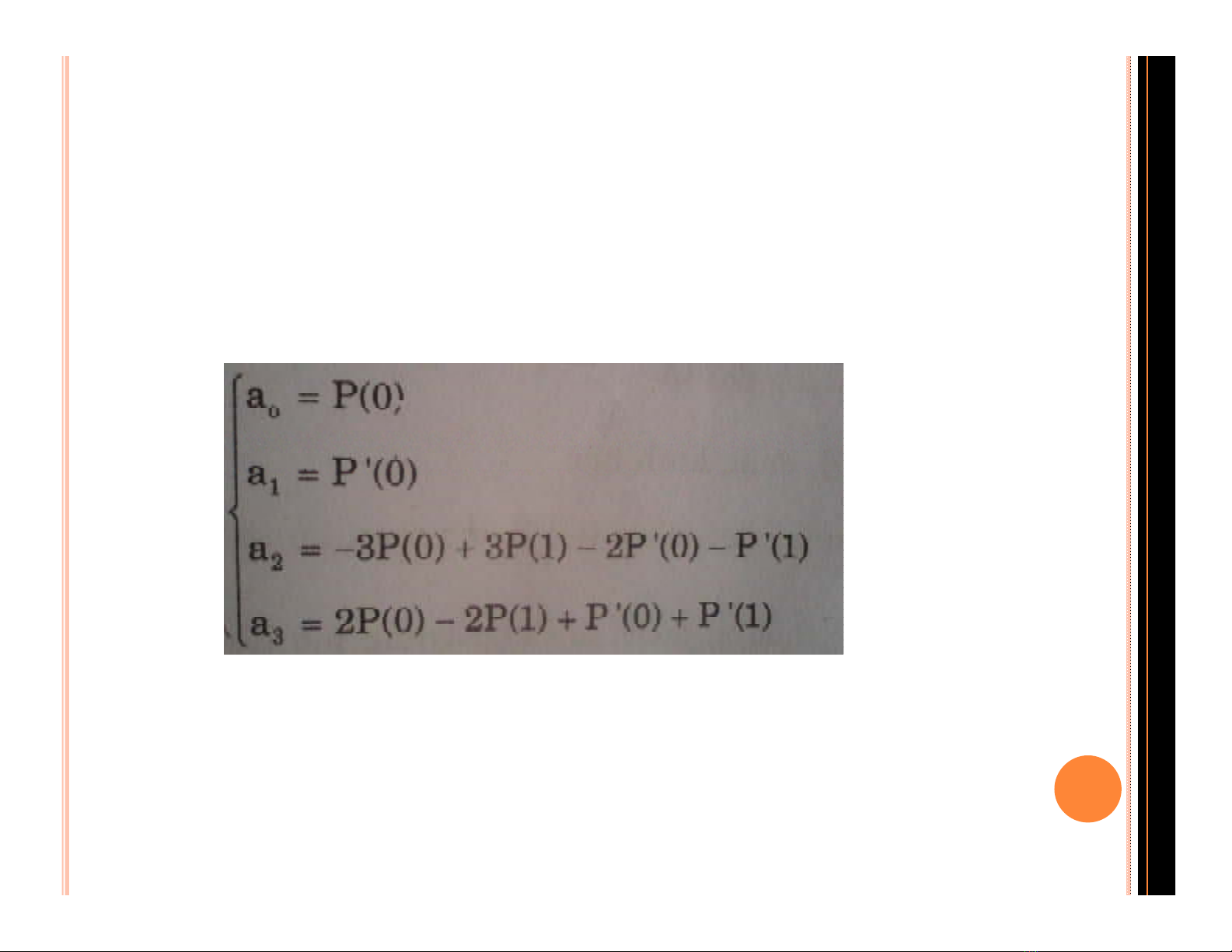
Giải hệphương trình (4.26) và (4.28) ta thu được
hệsốđại sốai:
P(t)=(2t3-3t2+1)P(0)+(-2t3+3t2)P(1)+(t3-2t2+t)P’(0)+(t3-
t2)P’(1) (4.29)
![Bài giảng Hình học họa hình: Bài mở đầu - Giới thiệu [Chuẩn SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250823/kimphuong1001/135x160/99131755935505.jpg)





![Bài tập Đại số tuyến tính [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/dkieu2177@gmail.com/135x160/79831759288818.jpg)













