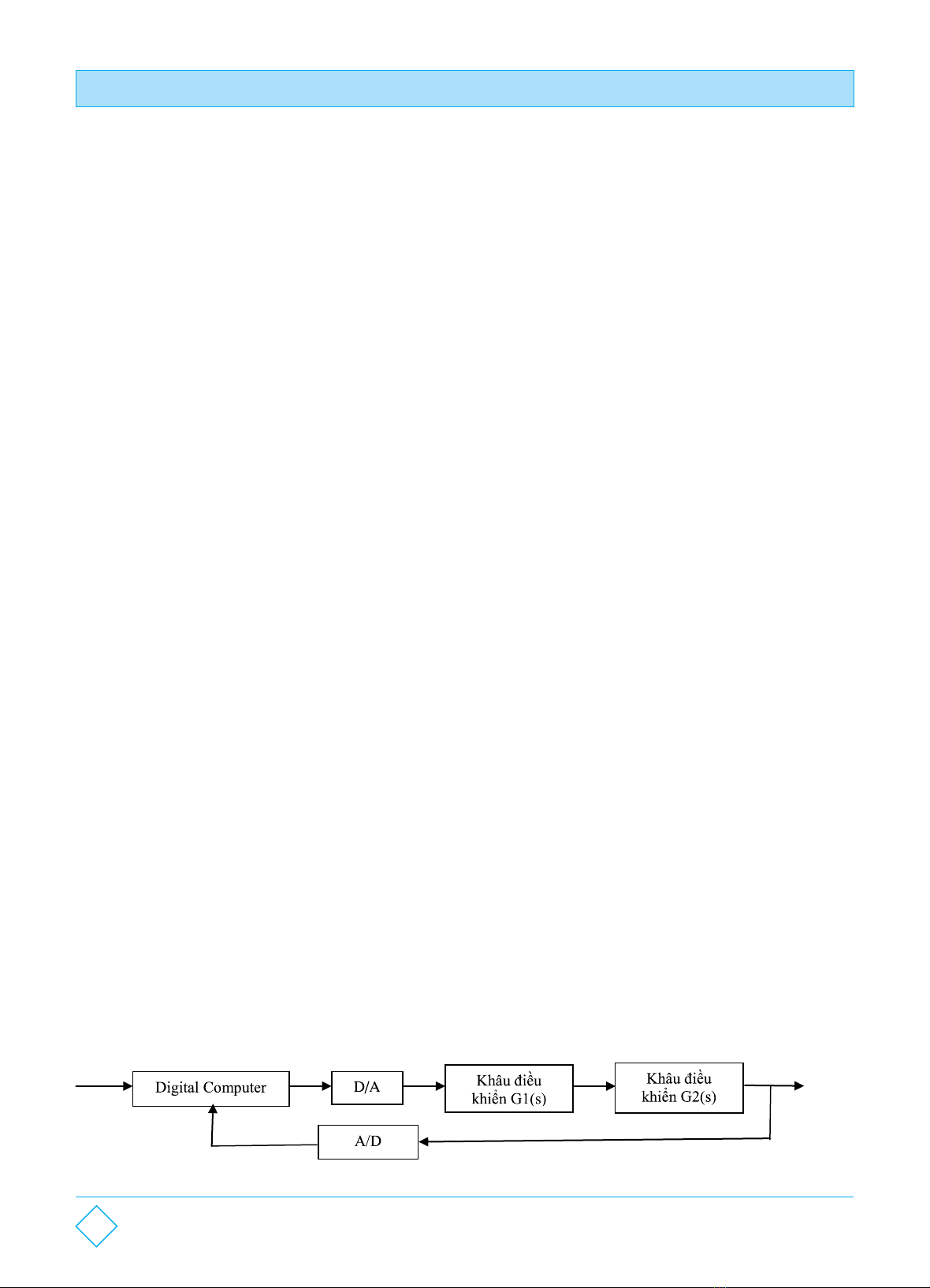
32Số 3/2024TẠP CHÍ ĐẠI HỌC HẢI DƯƠNG1. Đặt vấn đềBộ điều khiển PID (Proportional-Integral-Derivative) là thuật toán điều khiển tự động được sử dụng rộng rãi trong các hệ thống công nghiệp. Nó được ứng dụng để điều chỉnh tốc độ của động cơ một chiều, giúp cho hệ thống hoạt động ổn định và chính xác hơn. Trong những năm gần đây, các nghiên cứu về bộ điều khiển PID số đã được tiến hành mạnh mẽ trên thế giới, với mục tiêu cải thiện hiệu suất điều khiển, giảm thiểu sai số và đáp ứng các yêu cầu của các hệ thống điều khiển phức tạp.Hệ truyền động điện một chiều là một hệ thống cơ điện tử bao gồm động cơ một chiều, bộ biến tần và các thiết bị điều khiển khác. Việc điều chỉnh tốc độ của động cơ một chiều đóng vai trò quan trọng trong việc đáp ứng các yêu cầu về hiệu suất và độ chính xác của hệ thống.2. Nội dung nghiên cứu2.1. Đối tượng và phương pháp nghiên cứu- Đối tượng nghiên cứu: Bộ điều khiển PID số. Đây là một thuật toán điều khiển tự động được sử dụng rộng rãi trong các hệ thống công nghiệp để điều chỉnh một đại lượng đầu ra theo một giá trị mong muốn.- Phương pháp nghiên cứu:+ Phương pháp nhận dạng hệ thống: Sử dụng các tín hiệu đầu vào và đầu ra của hệ thống để ước tính các tham số của mô hình.+ Phương pháp thử nghiệm: Điều chỉnh thủ công các thông số để đạt được hiệu suất tốt nhất.+ Mô phỏng: Sử dụng các phần mềm mô phỏng như MATLAB, Simulink để kiểm tra hiệu suất của bộ điều khiển trong các điều kiện khác nhau.2.2. Phương pháp điều khiển PID số- Quá trình phân tích tín hiệu rời rạcTrước tiên, tín hiệu là loại một chuỗi xung, không phải là một hàm liên tục theo thời gian. Vì vậy, để thu nhận thông số của tín hiệu bằng phương pháp lượng tử hoá. Phương pháp lượng tử hoá theo thời gian là phương pháp dùng cho tín hiệu có biên độ liên tục, thời gian rời rạc. Hệ thống xử lý tín hiệu loại này được gọi là hệ thống rời rạc, ví dụ như mạch tạo xung, điều chế xung... Nếu phép lượng tử hoá được tiến hành theo cả biên độ và thời gian thì kết quả nhận được là tín hiệu số. Trong hệ thống số, thông số điều khiển-biên độ của các xung chỉ xuất hiện tại các điểm rời rạc cách đều nhau đúng bằng chu kỳ lấy mẩu của tín hiệu. Việc ổn định hệ thống càng trở nên phức tạp hơn so với hệ thống liên tục. Do đó, đòi hỏi kỹ thuật phân tích và thiết kế đặt biệt.Hệ thống điều khiển số được dùng ứng dụng nhiều và đa dạng do đưa máy tính số vào trong hệ thống điều khiển, sự cải tiến về giá cả và độ tin cậy vào máy tính số [4].Thiết kế bộ điều khiển PIB số điều chỉnh tốc độ trong hệ truyền động điện một chiều123ThS. Đoàn Văn Hải , TS. Vũ Văn Cát , ThS. Vũ Văn Hoàng 1, 2, 3 Khoa Công nghệ và Kỹ thuật, Trường Đại học Hải Dương, uhdhaidoan.edu@gmail.comTóm tắtNgày nay, cùng với sự phát triển của khoa học kỹ thuật đặc biệt là ngành kĩ thuật số, truyền động điện một chiều ngày càng trở nên tiện lợi và được ứng dụng rộng rãi hơn như: kết cấu gọn nhẹ, độ bền và độ tin cậy cao, tương đối sạch nên không gây ra các vấn đề về môi trường... Bên cạnh đó truyền động điện còn có ưu thế rất nổi bật, đặc biệt đối với truyền động điện một chiều, là khả năng điều khiển dễ dàng, chính xác. Chính vì thế, việc đi sâu nghiên cứu phân tích các hiện tượng, các quá trình xảy ra trong thiết bị điện, nhằm thiết kế những bộ điều khiển tự động điều chỉnh tốc độ với hiệu suất và khả năng thích ứng cao đã trở nên hấp dẫn. Xuất phát từ những vấn đề thực tiễn về điều chỉnh tốc độ trong hệ truyền động điện một chiều trong các máy sản xuất đặt ra, bài báo này đã thiết kế và khảo sát các hiện tượng xảy ra trong các bộ điều chỉnh tự động tốc độ dùng linh kiện kỹ thuật số theo sơ đồ hệ PID cho động cơ điện một chiều.Từ khóa: Matlab - Simulink; Truyền động điện một chiều; PID số; Điều chỉnh tốc độ động cơ.Hình 1: Hệ thống điều khiển số
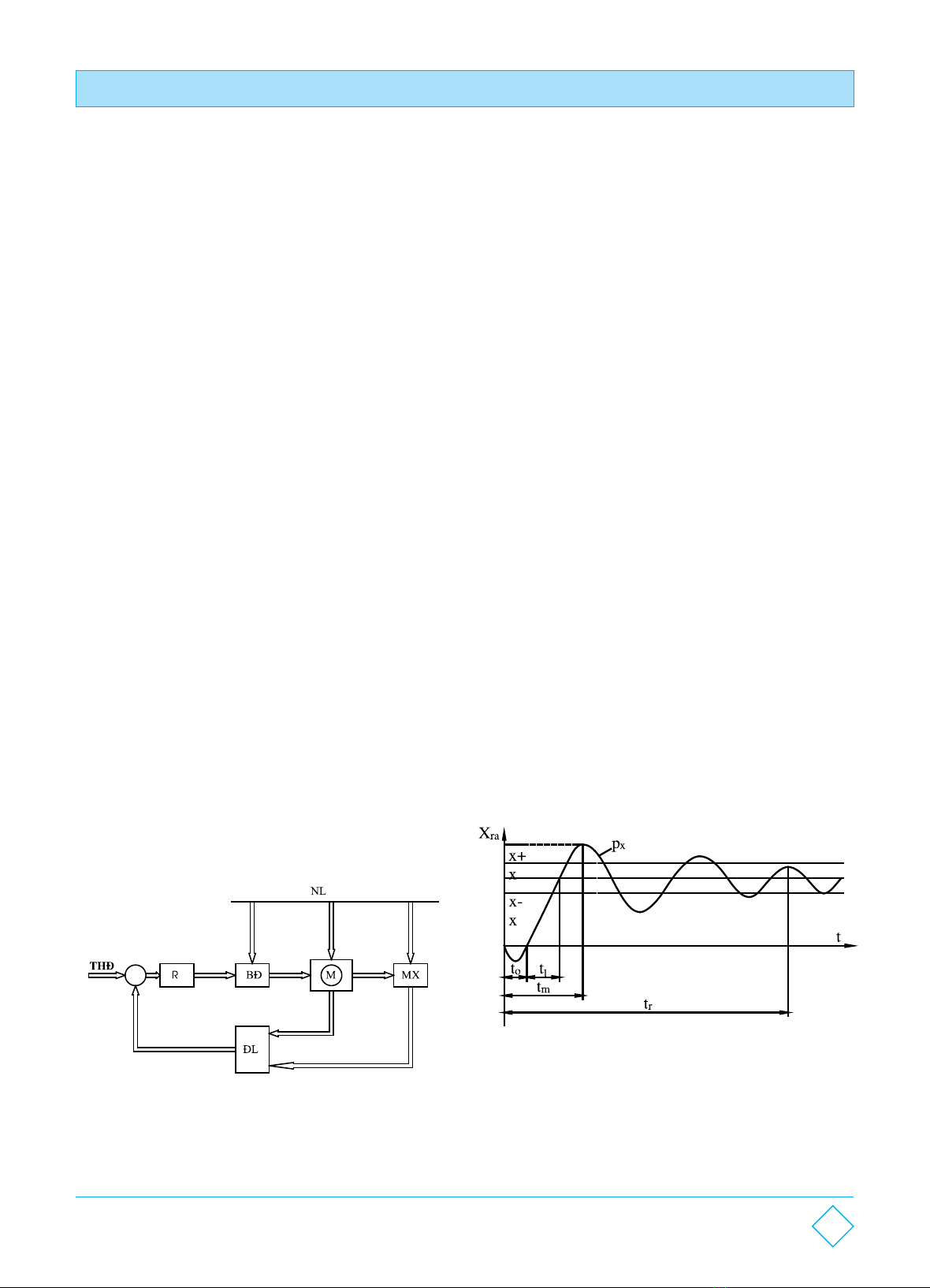
33Số 3/2024TẠP CHÍ ĐẠI HỌC HẢI DƯƠNGHệ thống điều khiển số, trong đó máy tính số được nối đến các khâu điều khiển và các hệ thống được điều khiển bởi các bộ biến đổi A/D, D/A. Hệ thống này được minh hoạ ở hình trên. Như vậy, hệ thống bao gồm 2 tín hiệu : tín hiệu rời rạc [r(nT), e(nT), b(nT)] và tín hiệu tương tự [u(t), m(t), c(t)] và được định nghĩa là hệ thống dữ liệu được lấy mẫu (Sampled-Data System).Có thể mô tả hoạt động lấy mẩu tốt nhất bằng cách xét một hàm liên tục e(t) như ở hình (8.2a). Giả sử hàm này có thể lấy mẩu tại các thời điểm cách đều nhau một khoảng thời gian là T, như vậy có thể mô tả hàm đã được lấy mẩu bởi một chuỗi các số sau: e(0), e(T), e(2T)...e(nT)Chuỗi này cho phép mô tả có giới hạn hàm e(t) nhất là giá trị của e(t) tại các thời điểm 0, T, 2T,..., nT. Giá trị của e(t) tại các thời điểm khác chỉ có thể được lấy gần đúng bằng phương pháp nội suy. Trên thực tế, vì khâu điều khiển và hệ thống điều khiển là tương tự, nên dữ liệu rời rạc sau khi lấy mẩu phải được xây dựng lại thành dạng liên tục trong suốt thời gian giữa những lần lấy mẫu.2.3. Thiết kế bộ điều khiển PID số điều chỉnh tốc độ động cơ điện một chiều trong hệ truyền động điện- Cấu trúc hệ truyền động điện: Mục tiêu cơ bản của hệ điều chỉnh tự động truyền đồng điện là phải đảm bảo giá trị yêu cầu của các đại lượng điều chỉnh mà không phụ thuộc vào tác động của các đại lượng nhiễu. Hệ thống điều chỉnh tự động truyền động điện có cấu trúc chung được trình bày trên hình 2.1 gồm: động cơ truyền động M quay máy sản xuất Mx và thiết bị biến đổi năng lượng BĐ (được gọi là phần lực); các thiết bị đo lường ĐL và các bộ điều chỉnh R (được gọi là phần điều khiển). Tín hiệu điều khiển hệ thống được gọi là tín hiệu đặt THĐ, ngoài ra còn các tín hiệu nhiễu loạn NL tác động lên hệ thống [7].Bộ biến đổi BĐ, là các bộ biến đổi dùng bán dẫn công suất gồm chỉnh lưu, các bộ biến tần, các bộ biến đổi xoay chiều thyristor, bộ băm xung điện áp, v.v...Các bộ biến đổi có hai chức năng: thứ nhất biến đổi năng lượng điện từ dạng này sang dạng khác thích ứng với động cơ truyền động; thứ hai mang thông tin điều khiển để điều khiển các tham số đầu ra bộ biến đổi (như công suất, điện áp, đòng điện, tần số,...).Tín hiệu điều khiển được lấy ra từ bộ điều chỉnh R. Các bộ điều chinh R nhận tín hiệu thông báo các sai lệch về trạng thái làm việc của truyền động thông qua so sánh giữa tín hiệu đặt (THĐ) và tín hiệu đo các đại lượng của truyền động. Tín hiệu sai lệch qua bộ điều chỉnh được khuếch đại và tạo hàm chức năng điều khiển sao cho đảm bảo chất lượng động và tĩnh của hệ thống truyền động.Các đại lượng điều chỉnh của truyền động là mô men quay, tốc độ, vị trí. Để đảm bảo chất lượng cho hệ thống truyền động thường sử dụng nhiều mạch vòng điều chỉnh như: điện áp, dòng điện, tốc độ, từ thông, tần số, công suất, mô men...- Những vần đề khi thiết kế hệ điều chỉnh tự động truyền động điện: Khi thiết kế hệ thống cần phải đảm bảo hệ thực hiện được tất cả các yêu cầu về công nghệ, các chỉ tiêu chất lượng và các yêu cầu về kinh tế.Chất lượng của hệ thể hiện trong trạng thái động và tĩnh. Ở trạng thái tĩnh quan trọng nhất là độ chính xác điều chỉnh. Ở trạng thái động yêu cầu về ổn định và các chỉ tiêu về chất lượng động là độ quá điều chỉnh, tốc độ điều chỉnh, thời gian điều chỉnh và số lần dao động (hình 3) [5].Hình 2: Cấu trúc chung của hệ điều chỉnh tự động truyền động điệnĐộng cơ truyền động: một chiều, xoay chiều không đồng bộ, xoay chiều đồng bộ và các loại động cơ bước.
Hình 3. Các thông số của đặc tính đáp ứng theo thời gian
t - thời gian điều chỉnh; t - thời gian hệ thống đạt giá trị r1quá điều chỉnh lần đầu; t - thời gian đạt được cực đại đầu mtiên, thời gian chết t và độ quá điều chỉnh p .0x- Các hệ số sai lệch: Xét một hệ thống tự động điều chỉnh có cấu trúc tối giản [7]

34Số 3/2024TẠP CHÍ ĐẠI HỌC HẢI DƯƠNGHình 4: a) Sơ đồ khối, b) Các đặc tính quá độF (p) - hàm truyền mạch hở;0TM - thiết bị công nghệ;R, r(t) - tín hiệu điều khiển;C, c(t) - tín hiệu ra;e= R - C - sai lệch điều chỉnh;N - các nhiễu loạn.iC(p) = F(p).R(p) + F(p)= F(p) - hàm truyền đối với các nhiễu loạn.Các thành phần quá độ của C(t) phụ thuộc vào đặc tính của mạch vòng điều chỉnh, vào tín hiệu điều khiển. Là nghiệm của các phương trình vi phân không thuần nhất. Thành phần nghiệm riêng của C(t) theo R(t) sẽ chép lại R(t) với độ chính xác nào đó. Thành phần của C(t) theo nhiễu loạn N(t) phải càng nhỏ càng tốt.iSai lệch điều chỉnh e(t) = R(t) - C(t) có thể viết dạng chuỗi hàm:å)()(pNpFii)(1)(00pFpF+ e(t)=CR(t)+C01 + C+ C2 idR(t)2dR(t)dt2dtid R(t)id N (t)nidt idt +..............+C+K(t)iNn Như vậy nếu biết trước R(t) và các nhiễu N(t) và bỏ qua ithặng dư K(t) thì ta có thể xác định được sai lệch e(t) nếu tính toán được các hằng số C . Các hằng số C - là các hệ số sai lệch:iiC - hệ số sai lệch vị trí; 0C - hệ số sai lệch tốc độ; l2 C- hệ số sai lệch gia tốc.Một hệ thống chính xác tuyệt đối là hệ có mọi hệ số sai lệch đều bằng không.Hàm truyền của hệ thống trên hình l-3a đối với sai lệch là [3]:Cũng có thể tính được các hệ số sai lệch với tín hiệu điều khiển nhờ hàm truyền của hệ thống đối với tín hiệu điều khiển:F(p) = = e=F (p)0F (p)0M (p)R(p)1 + R(p)N (p)Nếu đem chia đa thức M(p) cho đa thức N(p) thì ta có: 2iF(p) = (C + C P + C p + ... + Cp)R(p).e012iTừ đó suy ra cách tính các hệ số sai lệch điều chỉnh:C =lim{Fe(p)} khi p g 00C =lim{ } khi p g 00F(p) = F (p) = = 1-F(p)Có thể viết hàm truyền ở dạng tỉ số các đa thức:F(p)=++++++++Sử dụng công thức (l-4) ta suy ra cách tính các hệ số sai lệch như sau:C1-b0=0C=a-Ca-b,11011C=a-Ca-Ca-b,2211022C=a-Ca-b-ii0iiåCayi-yi-1................................y=1Nếu hệ thống có b = 1, b =a .... b = a .... b = a thì tất 011iimmcả các hệ số sai lệch sẽ bằng không.- Xây dựng mô hình hệ thống điều khiển vị trí motor DC cho bởi phương trình vi phân sau [1] [2]:Trong đó:22 J = 0.01 Kgm /slà moment quán tín của rotor b = 0.1 Mms là hệ số ma sát các bộ phận cơ khí K = K= K = 0.01 Nm/A là hằng số sức điện động e t R = 10 ohm là điện trở dây quấn L = 0.5 H là hệ số tự cảm V là điện áp đặt lên cuộn dây của motor θ là vị trí trục quay (ngõ ra của mô hình) i là dòng điện chạy trong cuộn dây của motor.Hình 5. Mô hình toán hệ điều khiển vị trí motor DC
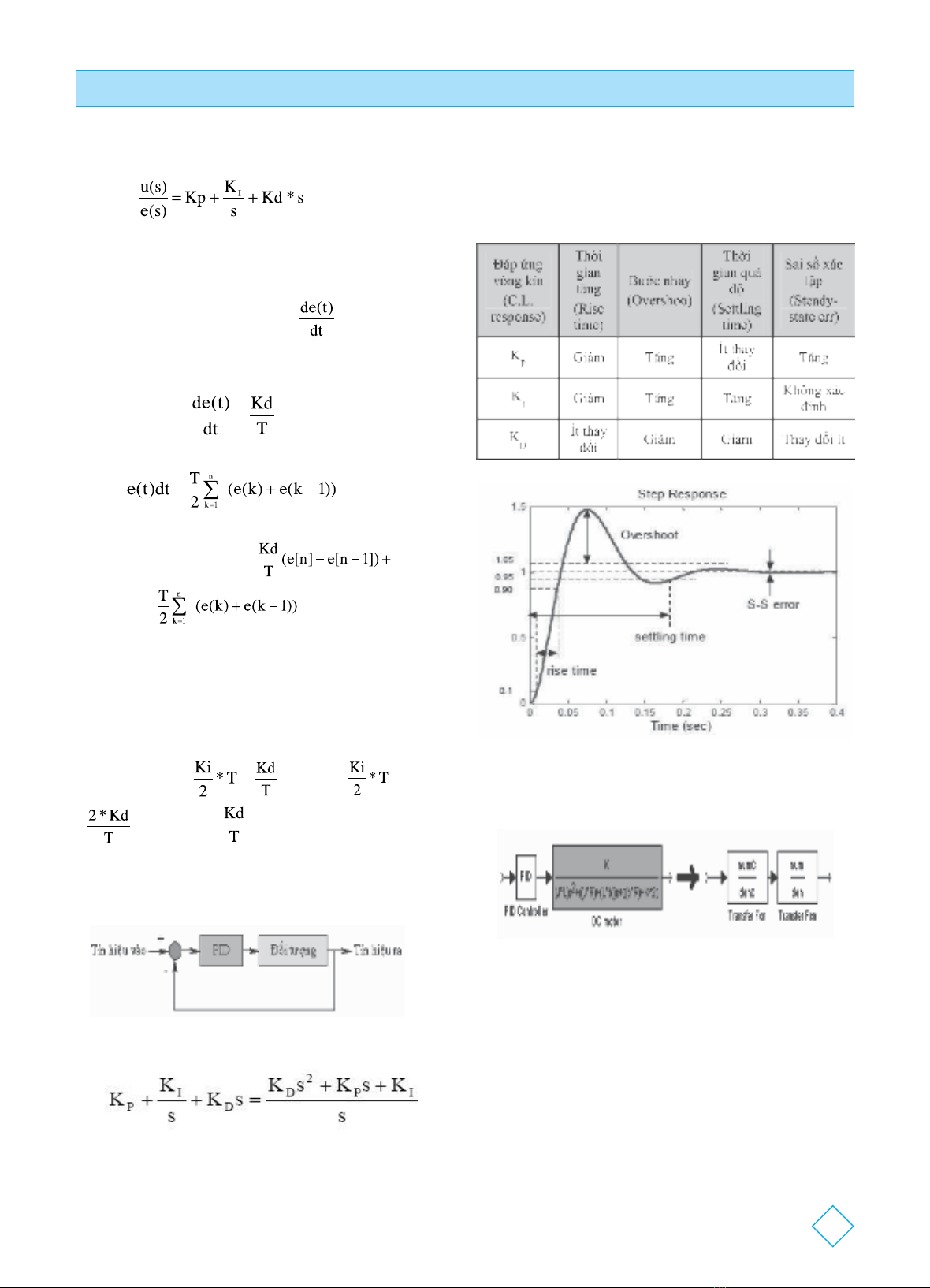
35Số 3/2024TẠP CHÍ ĐẠI HỌC HẢI DƯƠNG- Thuật toán hiệu chỉnh PIDHàm truyền liên tục PID có dạng: H(s)=Klà độ lợi khâu vi phân (Derivative gain) D Việc hiệu chỉnh phù hợp 3 thông số K, Kvà Ksẽ làm PI D tăng chất lượng điều khiển. Ảnh hưởng của 3 thông số này lên hệ thống như sau:Trong đó u: ngõ ra,e ngõ vào của bộ hiệu chỉnhThuật toán PID có thể nhận được khi sai phân hàm truyền trên, tương ứng phương trình vi tích phân sau:Kp*e(t)+Kiòe(t)dt+Kd* =u(t)*KGián đoạn hoá:Khâu vi phân (dùng định nghĩa sai phân):Kd* = *(e[n]-e[n-1])Suy ra:Khâu tích phân (theo nguyên tắc hình thang):ò=với e(0)=0u[n]*K=Kp*e[n]+ với e(0)=0Thay[n] bằng [n-1] và trừ vào phương trình trên nhận được công thức cho phép chúng ta tính u[n] từ u[n-1] và các giá trị liên tiếp của e[n] như sau:u[n]-u[n-1]=( A*e[n]+A*e[n-1]+A*e[n-2] )/Ku[n]=u[n-1]+( A*e[n]+A*e[n-1]+A*e[n-2] )/K012012
Với A= Kp+ + 0 A= - Kp0 -A=0 Trong đó T là chu kỳ lấy mẫu.2.4. Kết quả mô phỏngMô phỏng hệ thống bộ điều khiển PID sốHình 6. Sơ đồ khối hệ điều khiển PIDTrong đó hàm truyền của khâu PID là:Klà độ lợi của khâu tỉ lệ (Proportional gain) P K là độ lợi của khâu tích phân (Integral gain) I
Bảng 1. Hiệu chỉnh các thông số kỹ thuật bộ điều khiển PID
Khi thêm bộ điều khiển PID, hàm truyền hở của hệ thống là:Hình 7. Đáp ứng đầu ra hệ thống dùng bộ điều khiển PID>>Kp=100; >>Ki=1; >>Kd=1; >>numc=[Kd, Kp, Ki]; >>denc=[1 0]; >>numa=conv(num,numc); % tích chập tử số >>dena=conv(den,denc); % tích chập mẫu số Hàm truyền vòng kín hồi tiếp âm đơn vị: >>[numac,denac]=cloop(numa,dena); Đáp ứng Step của hệ điều khiển PID:
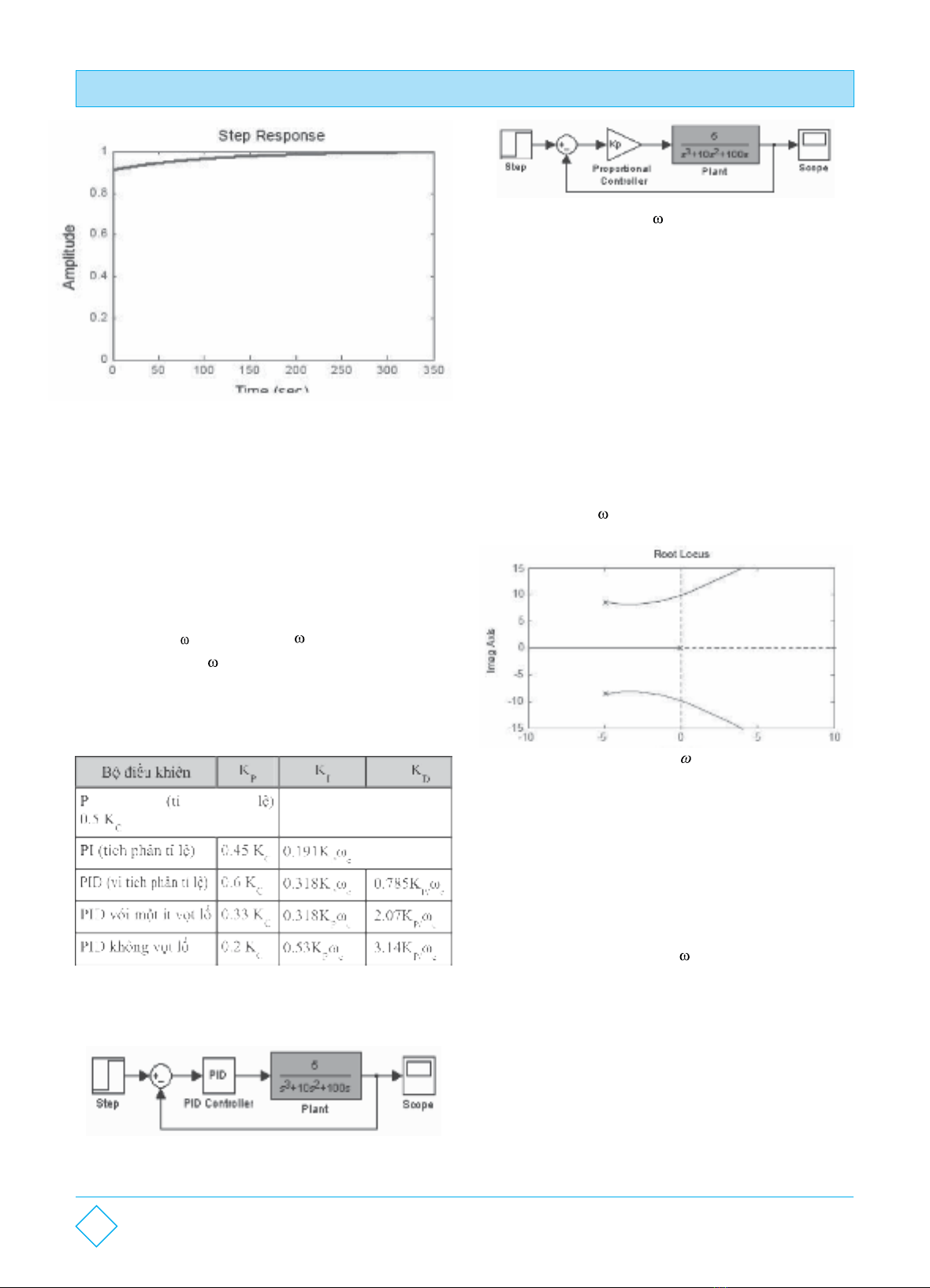
36Số 3/2024TẠP CHÍ ĐẠI HỌC HẢI DƯƠNGMột phương pháp cổ điển nhưng đơn giản và hiệu quả để chỉnh định 3 thông số K, Kvà Kcủa bộ điều khiển PID là PI D phương pháp Ziegler-Nichols (Ziegler Nichols Tuning Method). Thủ tục chỉnh định như sau: 1. Chỉ điều khiển hệ thống bằng bộ điều khiển tỉ lệ K(đặt P K=K=0). ID2. Tăng Kđến giá trị Kmà ở đó hệ thống bắt đầu bất ổn P C (bắt đầu xuất hiện sự giao động - điểm cực của hàm truyền kín nằm trên trục ảo j ). Xác định tần số của giao động vừa đạt. c Từ 2 giá trị Kvà vừa đạt, các thông số số K , Kvà KC c PI D được xác định: Hình 8. Hiệu chỉnh thông số của bộ điều khiển PIDGiả sử cần thiết kế bộ điều khiển PID cho hệ thống sau [6]:Bước 1: Điều khiển hệ thống chỉ với bộ điều khiển tỉ lệ:Bước 2: Xác định Kvà mà ở đó hệ thống bắt Bước 2: C c Xác định Kvà mà ở đó hệ thống bắt đầu giao động - dùng C c hàm rlocus của Matlab (nên lưu thành file.m hoặc thao tác trong Matlab Editor sau đó copy và dán vào Workspace cả đoạn lệnh để dễ dàng cho việc hiệu chỉnh các thông số ở phần sau):>>close all >>num=5; >>den=[1 10 100 0]; >>[numc,denc]=cloop(num,den); >>htkin=tf(numc,denc) % ham truyen vong kin >>rlocus(htkin); %ve qui dao nghiem >> axis([-10 10 -15 15]) Xác định Kc và bằng hàm rlocfind: c Nhấp chuột vào điểm giao nhau giữa quĩ đạo nghiệm và trục ảo của đồ thị, trong WorkSpace ta được: Kc = 199.5793 Omegac = -10.0145 0.0072 +10.0072i 0.0072 - 10.0072i Như vậy ta được K=200 và = 10. Suy ra thông số của Cc bộ điều khiển PID: K= 0.6K= 120 P C K = 0.318K= 381.6 I Pc K= 0.785K/= 9.4 D Pc Thử đáp ứng của hệ: >>Kp=120; Ki=381.5; Kd=9.4; >>numc=[Kd, Kp, Ki]; >>denc=[1 0]; % ham truyen cua PID >>[numac,denac]=cloop(conv(num,numc),conv(den,denc)) >>step(numac,denac)Hình 9. Tham số Kc và bộ điều khiển PIDc Bảng 2. Phương pháp Ziegler-Nichols hiệu chỉnh các thông số kỹ thuật bộ điều khiển PID

















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)
![Giáo trình CAD và ứng dụng: [Hướng dẫn chi tiết/Tài liệu đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/37741773135924.jpg)






