TRƯỜNG ĐẠI HỌC SƯ PHẠM HÀ NỘI
LÊ VĂN HIỆN
TÓM TẮT BÀI GIẢNG
PHƯƠNG TRÌNH VI PHÂN
Hà Nội-2021
MỞ ĐẦU
Lịch sử lý thuyết phương trình vi phân khởi nguồn từ nửa cuối thế kỉ XVII trong
các công trình của Isaac Newton, Gottfried Wilhelm Leibniz hay nhà Bernoulli, Jakob và
Johann. Các phương trình vi phân xuất hiện như một hệ quả tự nhiên khi các nhà toán
học áp dụng các ý tưởng mới trong giải tích vào một số bài toán trong cơ học. Trải qua
lịch sử hơn 300 năm, lý thuyết phương trình vi phân đã trở thành một công cụ đặc biệt
trong việc mô tả và phân tích nhiều bài toán thực tiễn không chỉ trong khoa học kỹ thuật
mà trong nhiều lĩnh vực khác nhau như trong y học, sinh thái học, kinh tế, môi trường
v.v. Tầm quan trọng của chúng là động lực thúc đẩy các nhà khoa học và toán học phát
triển các phương pháp trong nghiên cứu các tính chất nghiệm, từ các phương pháp tìm
nghiệm chính xác qua các hàm sơ cấp đến các phương pháp hiện đại của giải tích và xấp
xỉ số. Hơn nữa, lý thuyết này cũng đóng một vai trò trung tâm trong sự phát triển của
toán học bởi những câu hỏi và vấn đề về phương trình vi phân là khởi nguồn của nhiều
lĩnh vực toán học như topo, đại số, hình học và giải tích hiện đại [5].
Sự phát triển nhanh chóng của lý thuyết phương trình vi phân và những ứng dụng của
chúng trong nhiều ngành khoa học đã và đang thu hút sự quan tâm nghiên cứu của các
chuyên gia và người học trong các lĩnh vực đa ngành. Điều này đã đặt lý thuyết phương
trình vi phân ở vị trí đặc biệt trong toán học và khoa học ứng dụng. Ngày nay, lý thuyết
này được dạy ở nhiều cấp độ khác nhau trong hầu hết các trường đại học và viện nghiên
cứu trên thế giới [3].
Tập bài giảng này giới thiệu một cách cơ bản lý thuyết phương trình vi phân ở trình
độ đại học. Nội dung được trình bày ở đây phù hợp với hầu hết người đọc đã được trang
bị những kiến thức cơ sở về giải tích cổ điển và đại số tuyến tính. Với mức độ “nhập môn”,
bài giảng hướng trọng tâm vào cấu trúc tuyến tính và các tính chất nghiệm của những
lớp phương trình này.
Nội dung của bài giảng được chia làm 4 chương.
Chương 1 giới thiệu khái quát về phương trình vi phân. Một số khái niệm cơ bản được
giới thiệu thông qua các mô hình thực tiễn để người đọc tiếp cận một cách tự nhiên. Phần
giới thiệu tổng quát và chính xác sẽ được trình bày trong các chương sau.
Chương 2 nghiên cứu một số lớp phương trình vi phân cấp 1. Trong chương này, ngoài
phần lý thuyết tổng quát, chúng tôi trình bày phương pháp giải một số lớp phương trình
vi phân cấp 1 dạng đặc biệt và ứng dụng trong nghiên cứu định tính một lớp phương
trình vi phân trong sinh thái học.
Chương 3 giới thiệu các kết quả cơ bản về phương trình vi phân tuyến tính cấp cao.
Phần đầu chương là các kết quả tổng quát về cấu trúc và các tính chất nghiệm. Phần tiếp
theo là bài thực hành giải các phương trình vi phân tuyến tính với hệ số hằng số. Phần
cuối chương trình bày một số kết quả về lý thuyết dao động nghiệm của các phương trình
vi phân tuyến tính cấp 2.
Chương 4 giới thiệu về lý thuyết hệ phương trình vi phân tuyến tính bao gồm các tính
chất và cấu trúc tập nghiệm của hệ tuyến tính tổng quát, công thức nghiệm và phương
pháp giải hệ tuyến tính với ma trận hằng số.
2
Chương 1
GIỚI THIỆU VỀ PHƯƠNG TRÌNH VI PHÂN
1.1. Một số mô hình toán học
Trong thực tiễn, các đại lượng đo như vị trí, nhiệt độ, dân số của quần thể, mức độ
hấp thụ/chuyển hóa (trong các phản ứng hóa học) v.v thường được mô tả như những
hàm của thời gian. Thông thường, các định luật khoa học về các đại lượng đó được diễn
tả bằng các phương trình liên quan đến tốc độ biến đổi theo thời gian. Các định luật như
vậy đều dẫn đến các phương trình vi phân. Dưới đây ta xét một số ví dụ.
Ví dụ 1.1. (Newton’s cooling law)
Một vật được đặt trong một môi trường được duy trì ở nhiệt độ Ta. Định luật Newton
nói rằng tốc độ biến đổi của nhiệt độ T(t)của vật tỉ lệ với độ chênh nhiệt giữa vật đó với
môi trường. Luật Newton được diễn tả bằng phương trình
T′(t) = r(T(t)−Ta)(1.1.1)
ở đó rlà hệ số tỉ lệ. Phương trình (1.1.1) chứa hàm ẩn T(t)và đạo hàm T′(t). Đây là
một phương trình vi phân cấp 1.
Giả sử rlà một hằng số. Khi đó (1.1.1) là một phương trình vi phân tuyến tính. Hơn
nữa, giả sử tại thời điểm ban đầu t0= 0, nhiệt độ của vật là T0. Khi đó, (1.1.1) cho
nghiệm
T(t) = Ta+ (T0−Ta)ert.(1.1.2)
Từ (1.1.2) ta thấy hàm nhiệt độ T(t)giảm cấp mũ Takhi T0> Ta.
Trong thực tế, hệ số tỉ lệ rphụ thuộc cả vào thời gian và độ chênh nhiệt độ T(t)−Ta.
Tức là, r=r(t, T (t)−Ta). Khi đó, phương trình (1.1.1) trở thành một phương trình vi
phân phi tuyến cấp 1. Việc tìm nghiệm chính xác T(t)bây giờ trở nên khó khăn hơn,
thậm chí “không thể”. Vì vậy, các phương pháp định tính (nghiên cứu tính chất nghiệm)
được phát triển để phân tích dáng điệu của nghiệm các phương trình có cấu trúc phức
tạp nảy sinh từ các mô hình thực tiễn.
Ví dụ 1.2. (Mạch RC) Xét mô hình một mạch điện đơn giản gồm nguồn có hiệu điện
thế V(t), một điện trở Rvà một tụ C. Hiệu điện thế vc(t)qua tụ thỏa mãn biểu thức
RC dvc
dt +vc=V(t).(1.1.3)
Phương trình (1.1.3) được viết dưới dạng tuyến tính (chuẩn tắc)
dvc
dt =V(t)−vc
RC .(1.1.4)
Một số trường hợp đặc biệt:
3

a) Không có nguồn vào (zero-input) V(t) = 0: Nghiệm của (1.1.4) cho bởi vc(t) =
v0e−t/RC . Các nghiệm này hội tụ về 0 cấp mũ.
b) Nguồn không đổi: Trong một số trường hợp (chẳng hạn nguồn cho bởi bộ pin trong
khoảng thời gian ngắn), nguồn V(t) = Kkhông đổi. Khi đó phương trình (1.1.4) có điểm
cân bằng (nghiệm dừng) vc=K. Các nghiệm khác của (1.1.4) được cho bởi
vc(t) = v0e−t/RC +K1−e−t/RC .
Các nghiệm này hội tụ về điểm cân bằng vc=Ktheo cấp mũ.
c) Nguồn kiểu “bật-tắt” (on-off voltage): Chẳng hạn nguồn được duy trì là hằng số
V(t) = Ktrong khoảng thời gian [0, tf]rồi tắt (i.e. V(t) = 0). Khi đó nghiệm của (1.1.4)
được cho bởi
vc(t) = (v0e−t/RC +K1−e−t/RC ,0≤t≤tf,
vc(tf)e−
t−tf
RC , t ≥tf.
Các nghiệm này dần đến giá trị vc=Ktrong khoảng [0, tf]rồi hội tụ đến 0 theo cấp mũ
do không có “nguồn nuôi” V(t).
d) Nguồn “bật-tắt” tuần hoàn: Giả sử V(t) = Kvà lại tắt V(t) = 0 một cách tuần
hoàn sau những khoảng thời gian T > 0. Câu hỏi đặt ra là liệu các nghiệm tương ứng
của (1.1.4) có tính tuần hoàn? Có hội tụ đến giá trị vc=Khay vc= 0? Những câu hỏi
thú vị và quan trọng với các ứng dụng thực tiễn đặt ra những nghiên cứu định tính cho
lớp phương trình (1.1.4).
Ví dụ 1.3. (Mô hình dân số một loài)
a) Mô hình Malthus: Mô hình tăng trưởng dân số (của quần thể), dạng đơn sơ nhất,
dựa trên giả thiết rằng tốc độ tăng trưởng dân số của quần thể tỉ lệ thuận với dân số hiện
tại. Các yếu tố khác như giới hạn sức chứa của môi trường, nguồn tài nguyên, dịch bệnh
v.v không ảnh hưởng gì đến tốc độ này. Gọi P(t)là dân số tại thời điểm t. Khi đó P(t)
thỏa mãn phương trình
d
dtP(t) = rP (t),(1.1.5)
ở đó rlà hệ số tỉ lệ. Nghiệm của (1.1.5) được cho bởi P(t) = P0er(t−t0), ở đó P0là dân
số tại thời điểm ban đầu t0. Khi r > 0,P(t)→ ∞ khi t→ ∞ (“bùng nổ” dân số). Khi
r < 0,P(t)→0theo cấp mũ (suy giảm dân số đến tuyệt chủng).
b) Mô hình tăng trưởng Logistic: Ta hiệu chỉnh mô hình (1.1.5) có kể đến ảnh hưởng
giới hạn của môi trường. Giả thiết rằng:
- Khi dân số nhỏ (i.e. P(t)nhận giá trị bé), tốc độ tăng trưởng dân số tỉ lệ với số dân
hiện tại.
- Khi dân số quá lớn so với sức chứa của môi trường, dân số phải giảm (tăng trưởng
âm).
Giả sử môi trường có sức chứa (số dân giới hạn) là N. Khi P(t)rất bé so với N
thì P(t)/N không đáng kể. Khi đó tốc độ tăng trưởng theo luật (1.1.5) và xấp xỉ dP
dt =
kP 1−P
N,k > 0. Khi P > N thì kP 1−P
N<0, và do đó dân số suy giảm. Phương
trình dP
dt =kP 1−P
N(1.1.6)
gọi là phương trình logistic về tăng trưởng của mô hình dân số. Đó là một phương trình
vi phân cấp 1 phi tuyến dạng ô-tô-nôm (autonomous).
4
Ví dụ 1.4. (Mô hình thú-mồi) Trong ví dụ này ta xét mô hình một quần thể có hai loài
kí hiệu bởi R(loài mồi, e.g. rabbits) và F(loài thú, e.g. foxes). Giả sử rằng
- Khi không có thú, loài mồi phát triển theo luật tăng trưởng không giới hạn.
- Thú ăn mồi và tốc độ mồi bị ăn thịt tỉ lệ với tốc độ thú và mồi gặp nhau.
- Không có loài mồi, loài thú suy giảm tỉ lệ với dân số hiện tại.
- Tốc độ sinh trưởng loài thú tỉ lệ với lượng mồi bị ăn thịt.
Ký hiệu αlà hệ số tăng trưởng của mồi, βlà hệ số tỉ lệ xác định lượng thú và mồi gặp
nhau mà mồi bị ăn thịt, γhệ số suy giảm (tử) của loài thú và δlà hệ số tỉ lệ xác định độ
tăng trưởng của thú khi một con mồi bị ăn thịt. Các hệ số này được giả thiết là các hằng
số dương.
Khi đó, sự sinh trưởng của quần thể được đặc trưng bởi hệ sau
(R′= (α−βF )R
F′=−(γ−δR)F. (1.1.7)
Hệ (1.1.7) chứa các hàm ẩn F, R và các đạo hàm cấp 1 của chúng. Đó là một hệ phương
trình vi phân cấp 1 dạng ô-tô-nôm.
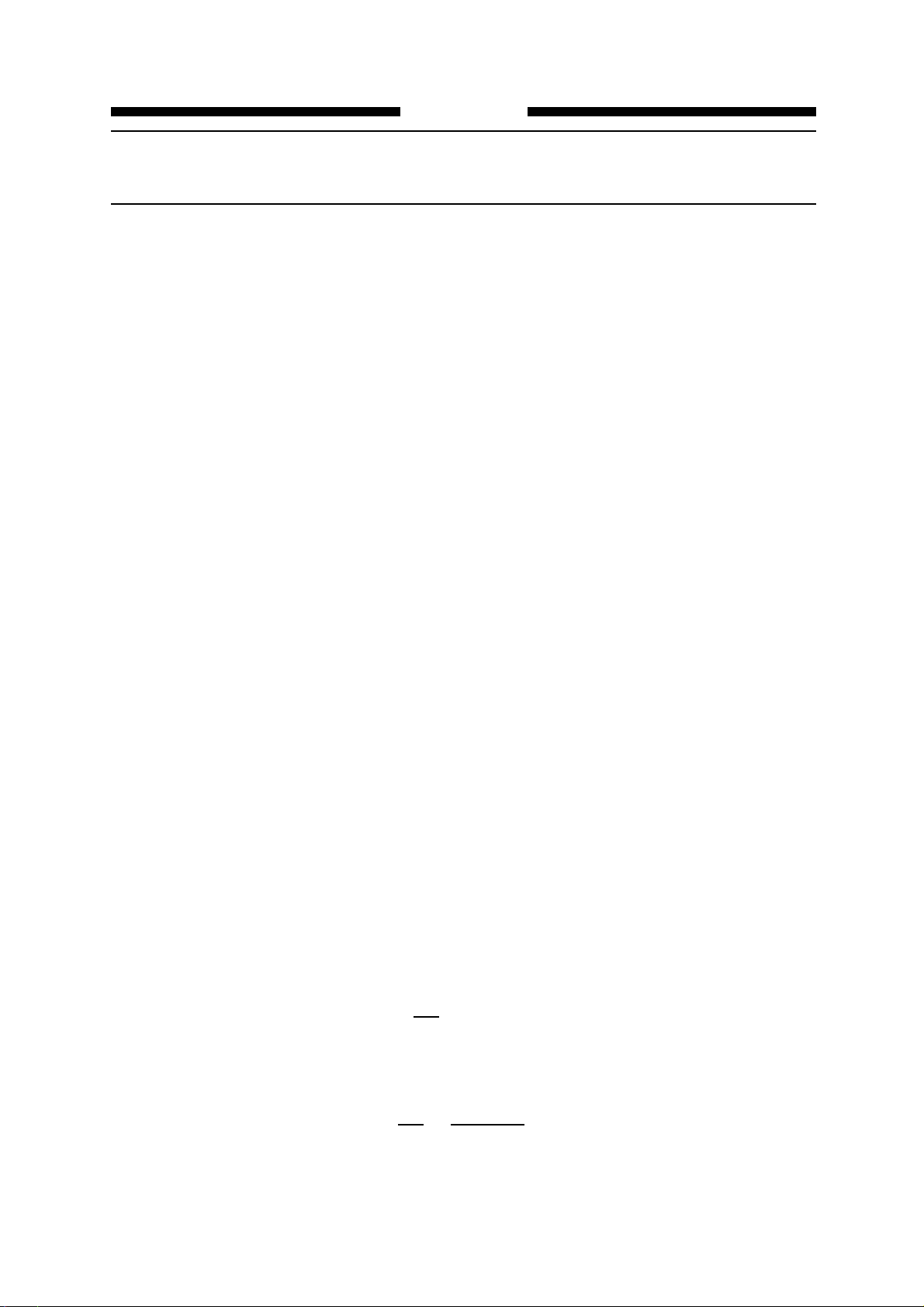
Ví dụ 1.5. (Mô hình dao động cơ học Mass-spring-damper)
Xét một cơ hệ như Hình 1.2 dưới đây. Một vật khối lượng mđược gắn với một lò xo
có độ cứng (stiffness) kvà clà độ nén của bộ giảm xóc (damper). Gọi x(t)là độ lệch
(displacement) của vật mtại thời điểm t.
Hình 1.1: Mô hình dao động cơ học
Theo định luật Hook, lực đàn hồi Fs=−kx. Lực giảm xóc (damping force) Fd=
−cdx
dt ,−cx′. Do đó, lực tổng hợp tác động trên vật mtại thời điểm tlà F=Fs+Fd=
−cx′−kx. Mặt khác, theo định luật Newton, F=ma =mx′′ . Từ đó ta có phương trình
chuyển động của vật m
x′′ +c
mx′+k
mx= 0.
Ký hiệu tần số ω=rk
mvà tỉ số giảm xóc ζ0=c
2√km, phương trình chuyển động của
vật mđược viết dạng
x′′ + 2ζ0ωx′+ω2x= 0.(1.1.8)
Phương trình (1.1.8) là một phương trình vi phân tuyến tính thuần nhất cấp 2. Nếu
trong mô hình 1.2 có thêm ngoại lực u(t)đóng vai trò như lực điều khiển thì phương trình
(1.1.8) trở thành phương trình tuyến tính cấp 2 không thuần nhất sau đây
x′′ + 2ζ0ωx′+ω2x=1
mu(t).(1.1.9)
5



















![Đề thi trắc nghiệm giữa kì môn Hóa đại cương 2: [Kèm đáp án/ Tổng hợp đề thi/ Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/quangbinhmc2006@gmail.com/135x160/56141778723328.jpg)

![Tài liệu Hóa học đại cương Trường Đại học Công nghệ Giao thông Vận tải [PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/vispacex_27/135x160/7711778501472.jpg)




%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)