
Lớp cơ điện tử 2-K47
Nhóm : NNT-DR 1
Động cơ trong robot
I.Động cơ bước :
1.Mở đầu
Lợi ích của động cơ bước :
Không chổi than: Không xảy ra hiện tượng đánh lửa chổi than làm tổn hao
năng lượng, tại một số môi trường đặc biệt (hầm lò...) có thể gây nguy hiểm
Tạo được mômen giữ: Một vấn đề khó trong điều khiển là điều khiển động
cơ ở tốc độ thấp mà vẫn giữ được mômen tải lớn. Động cơ bước là thiết bị
làm việc tốt trong vùng tốc độ nhỏ. Nó có thể giữ được mômen thậm chí cả
vị trí nhừ vào tác dụng hãm lại của từ trường rotor.
Điều khiển vị trí theo vòng hở: Một lợi thế rất lớn của động cơ bước là ta
có thể điều chỉnh vị trí quay của roto theo ý muốn mà không cần đến phản
hồi vị trí như các động cơ khác, không phải dùng đến encoder hay máy phát
tốc (khác với servo).
Độc lập với tải: Với các loại động cơ khác, đặc tính của tải rất ảnh hưởng
tới chất lượng điều khiển. Với động cơ bước, tốc độ quay của rotor không
phụ thuộc vào tải (khi vẫn nằm trong vùng momen có thể kéo được). Khi
momen tải quá lớn gây ra hiện tượng trượt, do đó không thể kiểm soát được
góc quay.
Phân loại động cơ :
Động cơ buớc với roto là nam châm vĩnh cửu
- nhận biết :
+ Khi mất nhãn mác, khi quay trục động cơ bước có rotor là nam châm
vĩnh cửu ta sẽ thấy vướng theo chu kỳ răng cưa.Trong khi đó, nếu là động
cơ từ trở sẽ thấy trơn.
+ Cũng có thể phân biệt bằng đồng hồ vạn năng. Động cơ từ trở thường có
3-4 cuộn dây được đấu chung GND trong khi động cơ nam châm vĩnh cửu
thì không.
Lớp cơ điện tử 2-K47
Nhóm : NNT-DR 2
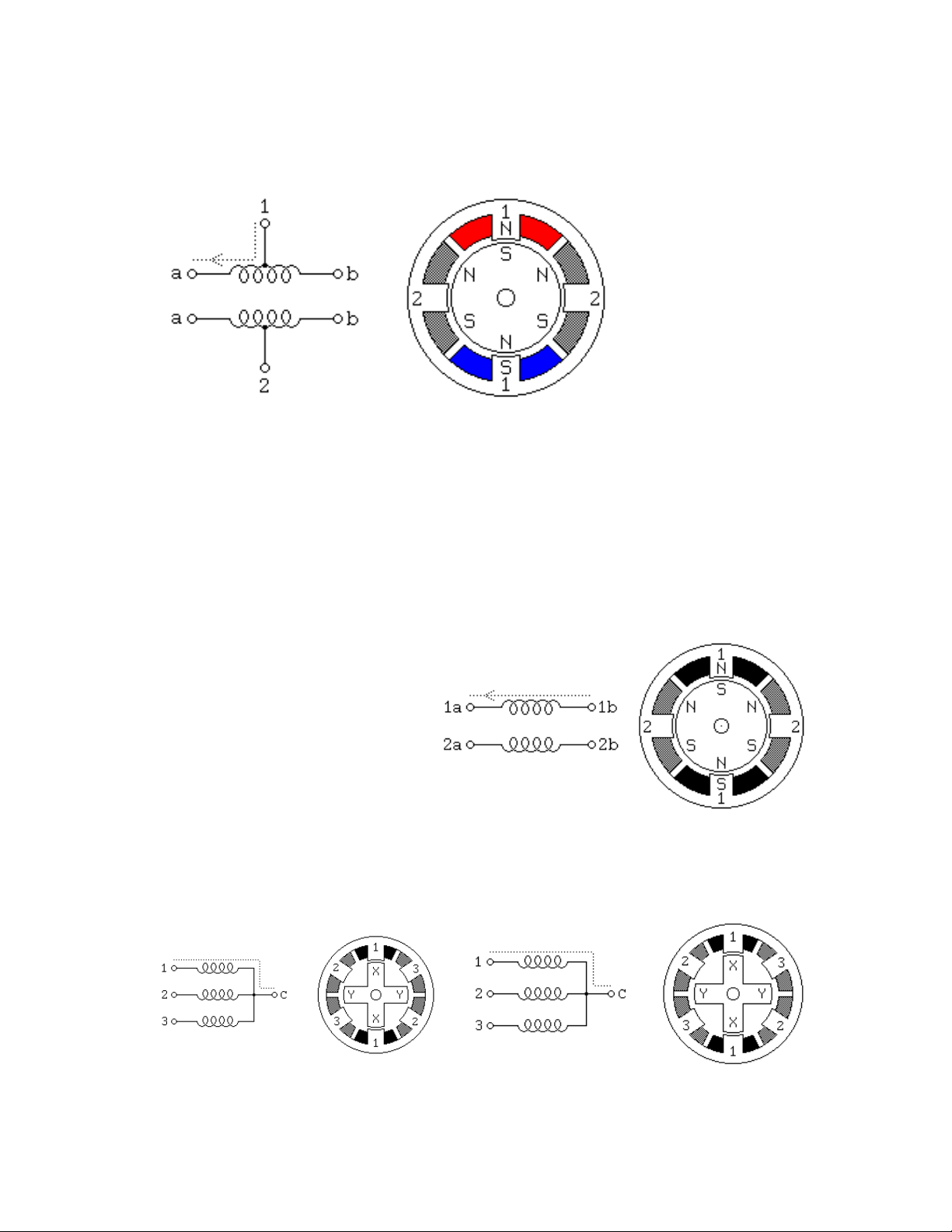
- phân loại động cơ :
+)Động cơ loại đơn cực (Unipolar), thường có 6 đầu ra. Đầu 1,2 thường
được nối với cực dương, hai đầu a và b có thể được nối xuống đất hoặc
không sẽ quyết định chiều quay của động cơ.
+)Động cơ loại lưỡng cực (Bipolar), thường có 4 đầu ra. Về cấu tạo đơn
giản hơn nhưng khó cho điều khiển vì phải đảo chiều dòng điện qua
cuộn dây a,b.
Động cơ bước kiểu từ trở
Lớp cơ điện tử 2-K47
Nhóm : NNT-DR 3
Nguyên lí :
Thông thường có ba hoặc bốn cuộn dây đấu chung một đầu. Đầu chung
được nối với nguồn dương, các đầu còn lại lần lượt cho thông với đất để
quay rotor.
Trên hình vẽ, rotor có 4 răng và stator có 6 cực. Mỗi cuộn dây sẽ được quấn
trên hai cực đối nhau. Vì vậy, giả sử, khi cấp điện cho cực 1 (stator), rotor sẽ
quay cực gần nhất (X) để răng thẳng với cực 1. Cắt điện cuộn số 1, tiếp tục
cấp điện cho cuộn 2, rotor sẽ quay răng tiếp sau (Y) cho thẳng với cực 2. Cứ
như vậy điều khiển quay rotor.
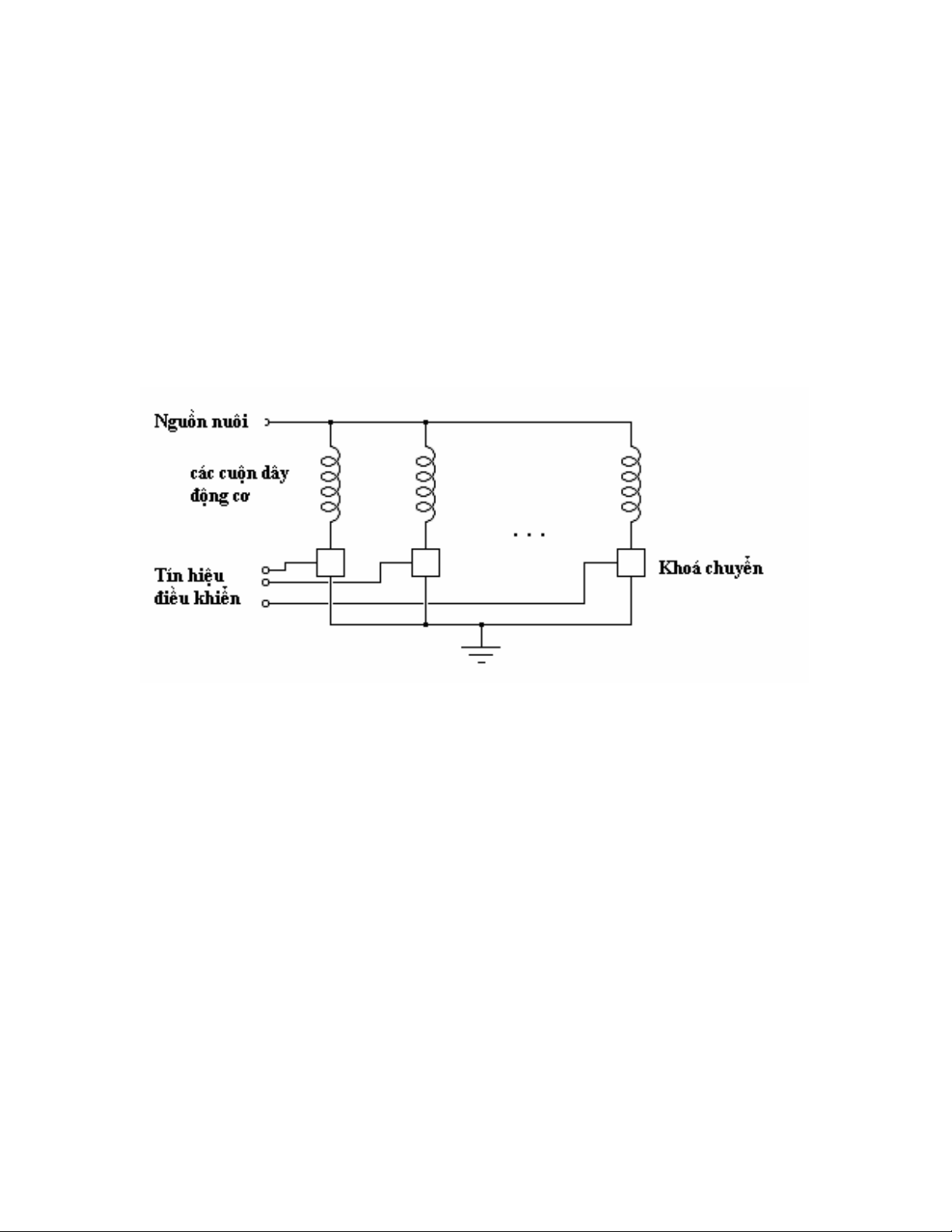
Sơ đồ điều khiển cơ bản của động cơ từ trở :
Điện áp được cấp qua các khoá chuyển để nuôi các cuộn dây, tạo ra từ
trường làm quay rotor. Các khoá ở đây không cụ thể, có thể là bất cứ thiết bị
đóng cắt nào điều khiển được như rơle, transitor công suất... Tín hiệu điều
khiển có thể được đưa ra từ bộ điều khiển như vi mạch chuyên dụng, máy
tính.
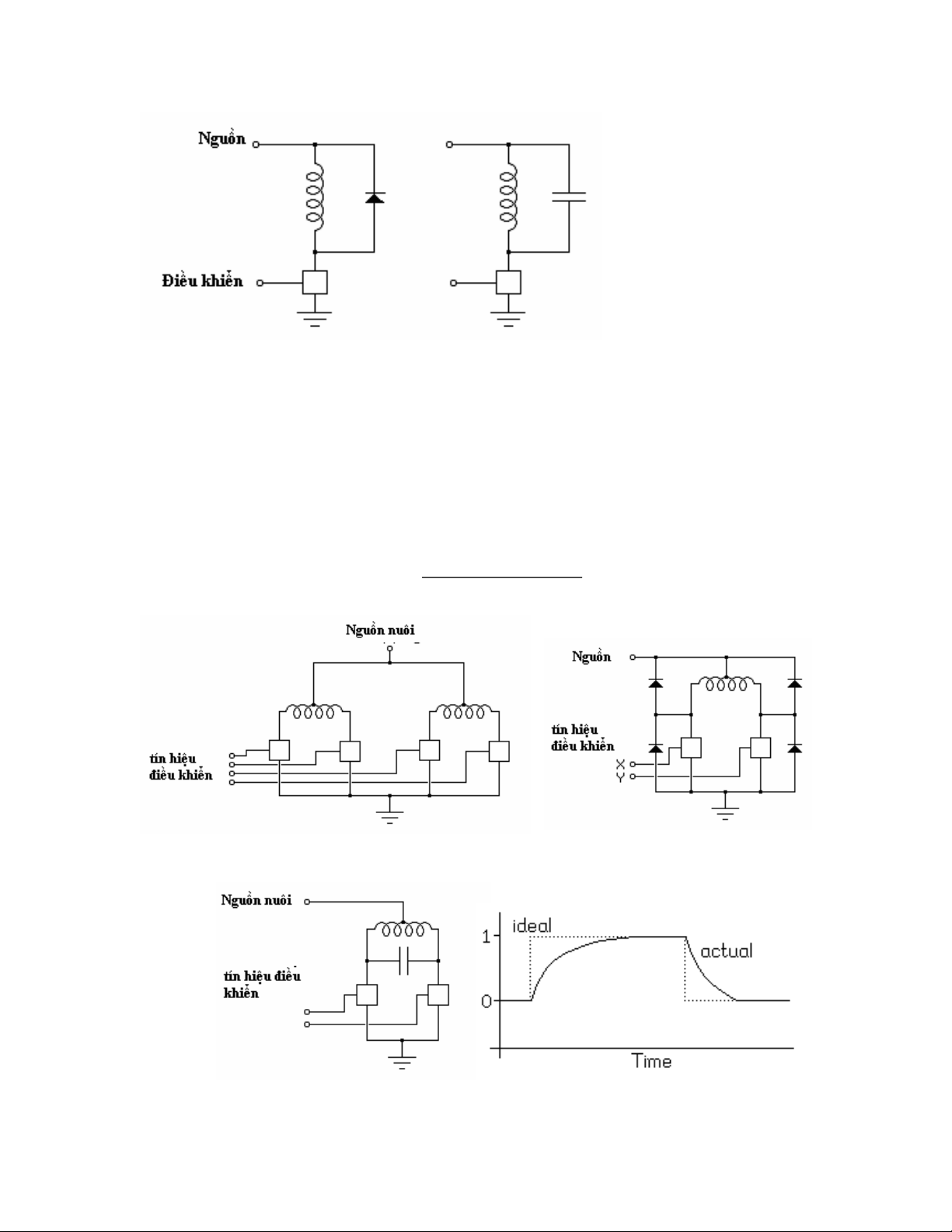
Vấn đề bảo vệ khóa điều khiển :
Do cuộn dây động cơ có tính chất cảm nên không thể đóng cắt dòng qua
cuộn dây ngay lập tức. Khi đóng, dòng trong cuộn dây tăng từ từ, trễ so với
áp. Khi mở khoá, dòng này có thể gây lên một điện áp lớn đánh thủng tiếp
điểm của khoá.
Để tránh vấn đề này có hai phương cách giải quyết:
+ Mắc vào hai đầu cuộn dây một diode ngược
+ Mắc vào hai đầu cuộn dây một tụ điện
Như hình vẽ:
Lớp cơ điện tử 2-K47
Nhóm : NNT-DR 4
C1: Diode đảm bảo dẫn dòng qua trong một thời gian ngắn. Nếu dùng diode
thường, loại 1N400x cần mắc song song thêm một tụ nhỏ.
C2: Khi mở khoá, năng lượng trong cuộn dây sẽ được nạp vào tụ. Điện áp
trên bản cực tụ cao hơn điện áp nguồn và phải đảm bảo nhỏ hơn điện áp chịu
đựng của khoá chuyển. Từ đó có công thức tính tụ bảo vệ như trên. Khi khoá
đóng, áp từ tụ xả qua khoá và khoá cũng cần chịu được điện áp này.
Điều khiển động cơ bước đơn cực :
2 2
2
2
_ ax
/ 2 / 2
( )
van m ng
P CU LI
LI
CU U
Lớp cơ điện tử 2-K47
Nhóm : NNT-DR 5
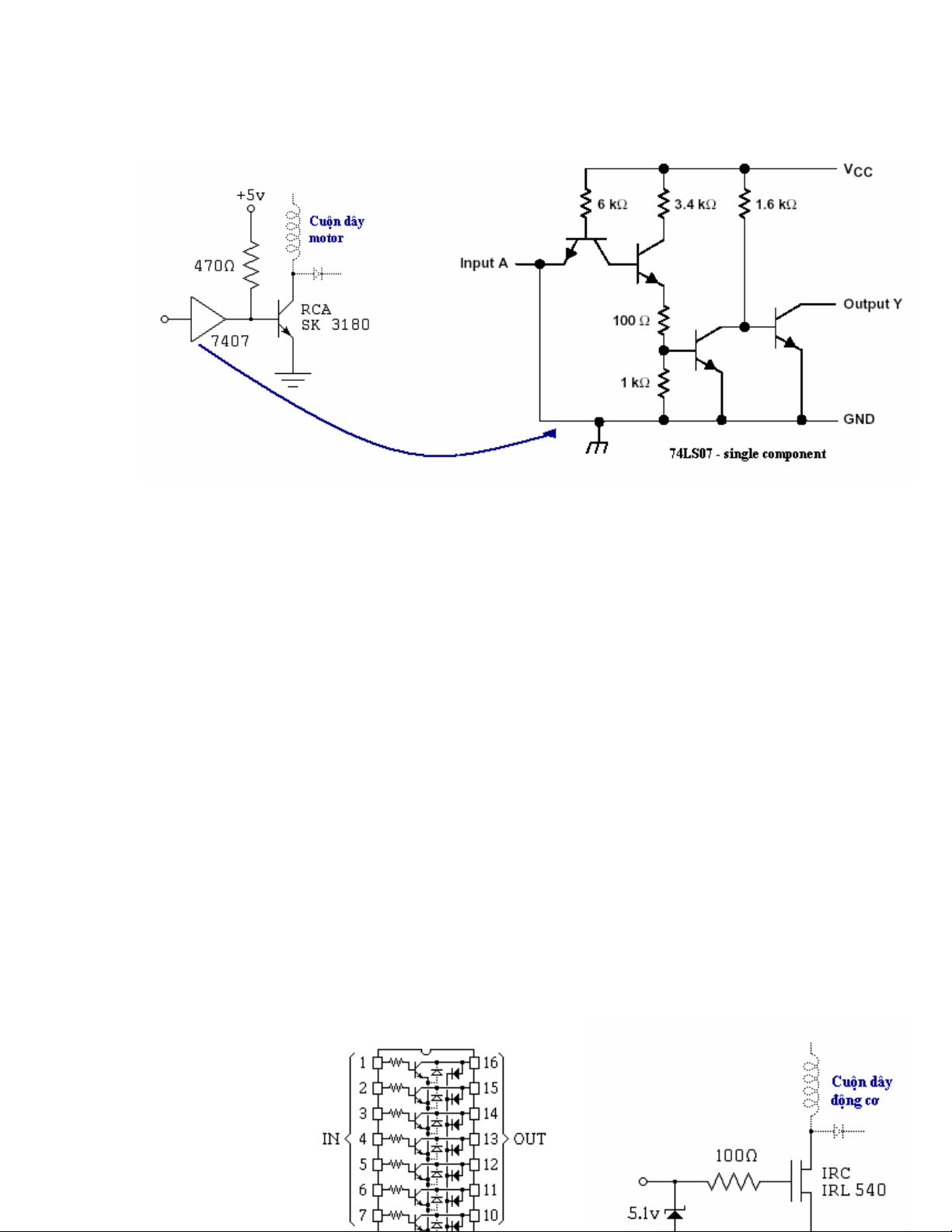
Mạch thực tế :
Khoá chuyển mạch dùng là transitor SK3180 với hệ số khuếch đại
khoảng 1000 lần. Với điện trở bazơ là 470 Ohm, dòng bazơ khoảng 10 mili
Ampe, nghĩa là có thể cho dòng qua cuộn dây đạt vài Ampe.
Có thể thay 74LS04 bằng một phần tử logic khác có cấu tạo collector
hở, chịu được dòng qua khoảng 10 mili Ampe. Khi khoá chuyển có sự cố,
dòng từ tải không “chảy” quay lại mạch điều khiển.
+ MOSFET ( Metal Oxit Semiconductor Field Effect Transitor):
Điều khiển bằng điện áp,Ron nhỏ, tự ngắt ở điện áp source-drain quá
cao, có thể bật tắt với tốc độ cao, hoàn toàn tuyến tính.
MOSFET IRC IRL 540 có thể dẫn dòng lên tới 20 Ampe và tự ngắt
tại điện áp 100V. Điều này dẫn đến việc không cần phải có diode bảo vệ khi
gắn switch với một phiến tản nhiệt phù hợp.
Trên mạch còn một diode ổn áp 5.1 V, một điện trở 100 Ohm. Trong
trường hợp transitor bị hỏng, áp ngược không thể vượt quá cao làm hỏng các
linh kiện TTL của mạch điều khiển.
Với điều khiển động cơ chỉ cần dòng qua cuộn dây cỡ 500 mili Ampe,
có thể dùng IC loại dãy darlington collector hở:
+ ULN2003, ULN2803 ( Allegro Microsystem)
+ DS2003 (National Semiconductor), MC1413 ( Motorola)





















![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
![Câu hỏi ôn tập Cơ sở xử lý ảnh số [năm] chuẩn nhất](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250710/kimphuong1001/135x160/84701752136985.jpg)

![Câu hỏi ôn tập Robot công nghiệp [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kimphuong555/135x160/7711751422232.jpg)
