1
MỞ ĐẦU
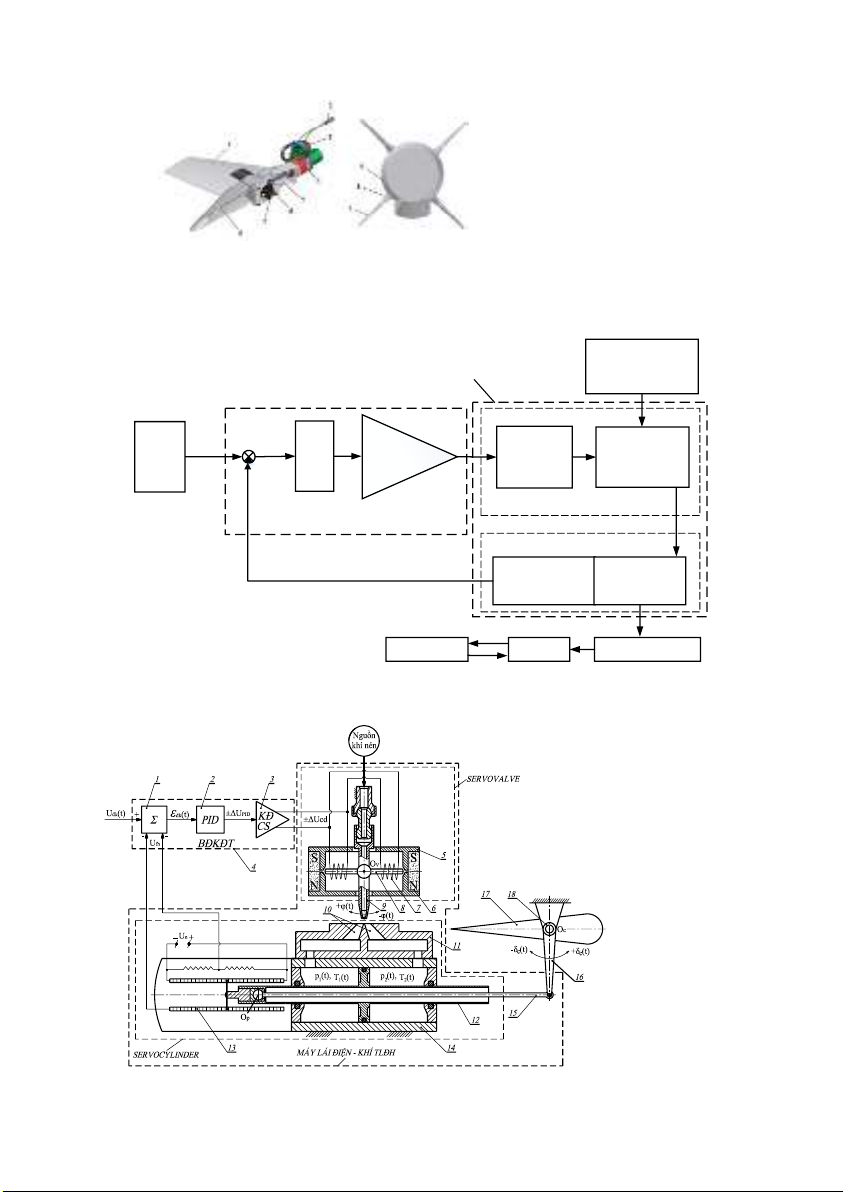
Tính cấp thiết của luận án: Máy lái điện - khí tên lửa tên lửa đối
hải (TLĐH) là một dạng đặc thù của hệ thống truyền động tự động bám
điện - thủy - khí, nó thực hiện chức năng tự động chấp hành tín hiệu điều
khiển từ máy tính trên khoang để điều khiển cánh lái khí động, lái tên lửa
bay theo quỹ đạo tính toán đến mục tiêu cần tiêu diệt.
Hiện tại, trong các dự án chuyển giao công nghệ lắp ráp, chế tạo tên
lửa ở nước ta, vì những lý do khác nhau đối tác không chuyển giao các tài
liệu chuyên ngành liên quan đến lý thuyết tính toán, thiết kế máy lái điện -
khí TLĐH. Mặt khác, các tài liệu nghiên cứu về động lực học hệ thống
truyền động tự động bám điện - thủy - khí ứng dụng trong máy lái tên lửa
có tính đến các đặc điểm về quy luật ngoại tải khí động, về cơ cấu dẫn động
không gian từ trục đầu ra của hệ thống truyền động đến trục quay cánh lái
đã được công bố ở trong và ngoài nước còn rất hạn chế và chỉ đưa ra một
số mô hình toán đơn giản, không có tính tổng quát hóa. Do đó, để tiến tới
làm chủ thiết kế và công nghệ chế tạo sản phẩm máy lái điện - khí TLĐH
bằng nội lực trong nước, đáp ứng được các nhiệm vụ của quân đội nhằm
bảo vệ chủ quyền biển, đảo của đất nước trước tình hình an ninh thế
giới, khu vực và đặc biệt là tình hình Biển Đông đang có những diễn
biến phức tạp về tranh chấp biển, đảo. Việc nghiên cứu đưa ra cơ sở
khoa học và phương pháp tính toán, thiết kế tối ưu máy lái điện - khí TLĐH
là thực sự cần thiết, có tính mới về khoa học và có ý nghĩa thực tiễn.
Mục đích của luận án: Nghiên cứu xây dựng và hoàn thiện cơ sở
lý thuyết về tính toán thiết kế động lực học máy lái điện - khí TLĐH
nhằm tạo ra sản phẩm tính toán lý thuyết, xây dựng các mô hình thiết kế
động lực học tối ưu máy lái điện - khí TLĐH.
Nội dung nghiên cứu của luận án: Xây dựng mô hình toán động
lực học phi tuyến tổng quát mô tả được đầy đủ các quá trình điện - từ - cơ
- khí nén xảy ra và tương tác động lực học với nhau trong máy lái điện -
khí; xây dựng chương trình giải bài toán phân tích động lực học máy lái
điện - khí; thực nghiệm trên máy lái điện - khí mẫu, đánh giá sự đúng đắn
của mô hình toán động lực học được xây dựng; nghiên cứu ảnh hưởng
các thông số thiết kế cơ bản đến các chỉ tiêu chất lượng đặt ra và xác định
không gian tồn tại các mô hình thiết kế khả thi; xây dựng bài toán tổng
hợp thiết kế động lực học tối ưu và xây dựng chương trình giải bài toán
tổng hợp thiết kế động lực học tối ưu máy lái.
Đối tượng nghiên cứu của luận án: Máy lái điện - khí TLĐH.
Phạm vi nghiên cứu: bài toán phân tích động lực học và tổng hợp thiết kế