MINISTRY OF EDUCATION
AND TRAINING
VIETNAM ACADEMY OF SCIENCE
AND TECHNOLOGY
GRADUATE UNIVERSITY OF SCIENCE AND TECHNOLOGY
-----------------------------
Ngo Ngoc Thanh
PROPOSED OPTIMAL CONTROL ALGORITHMS
FOR PHOTOVOLTAIC ARRAYS RECONFIGURATION
Major: Control and Automation Technology
Code: 9.52.02.16
SUMMARY OF ENGINEERING DOCTORAL DISSERTATION
Ha Noi – 2020
This work is completed at:
Graduate University of Science and Technology
Vietnam Academy of Science and Technology
Supervisor:
Prof.Dr. Nguyen Phung Quang
Reviewer 1: ……………………………………………………..........................……….
……………………………………………………………………………........................
Reviewer 2: ………………………………………………………………........................
…………………………………………………………………………............................
Reviewer 3: ………………………………………………………………........................
……………………………………………………………………………........................
This Dissertation will be officially presented in front of the Doctoral Dissertation
Grading Committee, meeting at:
Graduate University of Science and Technology
Vietnam Academy of Science and Technology
At …………. hrs ……. day ……. month……. year …….
This Dissertation is available at:
1. Library of Graduate University of Science and Technology
2. National Library of Vietnam
Assoc.Prof.Dr. Pham Thuong Cat

1
INTRODUCTION
1. Introduction
Photovoltaic panels during the working process in solar power plants can receive
inconsistent solar irradiance levels in many cases due to the partial shading. In the context
of partial shading, the system capacity shows a significant decrease, in addition to the
phenomenon of Misleading (confusion due to the maximum power point).
Development of a solar system reconfiguration strategy based on the irradiance equalization
method is a key area of research, whereby the solar system restructuring is the rearrangement
of the connection circuitry of photovoltaic panels for the purposes of increased output power
and device protection when the solar system works in heterogeneous lighting conditions.
Therefore, the topic “Proposed optimal control algorithms for photovoltaic arrays
reconfiguration” was selected for this thesis to contribute to solving problems in the solar
system reconfiguration strategy.
2. Thesis objectives and tasks
✓ Establishing a mathematical model, putting forward an algorithm applied for seeking the solar
system's irradiance equalization configuration under the heterogeneous lighting conditions.
✓ Establishing a mathematical model, putting forward an algorithm applied for choosing an
optimal circuit switching method, from the initial connection configuration to the irradiance
equalization configuration.
3. Research scope
✓ Studying primary sources, connecting photovoltaic panels with the use of TCT connection circuit.
✓ Without considering constraints on equipment production costs, economic nature when
putting into practice.
4. New findings of the thesis
✓ Establishing the mathematical model, applying Dynamic programming (DP) algorithm and
proposing Smartchoice (SC) algorithm for selecting the irradiance equalization
configuration to find ways of arranging connection positions of photovoltaic panels so that
optimal system power and local maximum points elimination can be achieved.
✓ Proposing the mathematical model, applying the Munkres assignment algorithm (MAA)
and proposing an improved MAA for selecting the optimal circuit switching method aimed
at extending the life of switching matrix in the solar system.
✓ Building a simulation toolkit on Matlab-Simulink and Micrsoft Visual Studio in order to assess
the performance and accuracy of algorithms used for proving new methods of the thesis.
5. Thesis structure:
The thesis is broken down into 4 chapters.
Chapter 1: Solar system structure and system performance improvement strategy under
partial shading conditions.
Chapter 2: Introduction to the optimal control theory
Chapter 3: Development of a system restructuring strategy using optimal control theory
Chapter 4: Simulation and experiment
2
Chapter 1: SOLAR SYSTEM STRUCTURE AND SYSTEM PERFORMANCE
IMPROVEMENT STRATEGY UNDER PARTIAL SHADING CONDITIONS.
1.1 Introduction to the solar system
1.1.3 Solar power
Solar power is generated from either the conversion of sunlight into electricity, or directly
by using photovoltaic panels, or indirectly through thermal energy using the concentrated
solar power.
1.1.4 Photovoltaic panels connecting structures
There are basically two main connection standards for photovoltaic panels: serial and
parallel. The advantage and disadvantage of parallel connection circuit are that the current
is the total current of photovoltaic panels, and the voltage is equal to the minimum voltage
of photovoltaic panels, respectively. The advantage and disadvantage of serial connection
circuit are that the voltage is the total voltage of photovoltaic panels, and the current is equal
to the minimum current of photovoltaic panels, respectively.
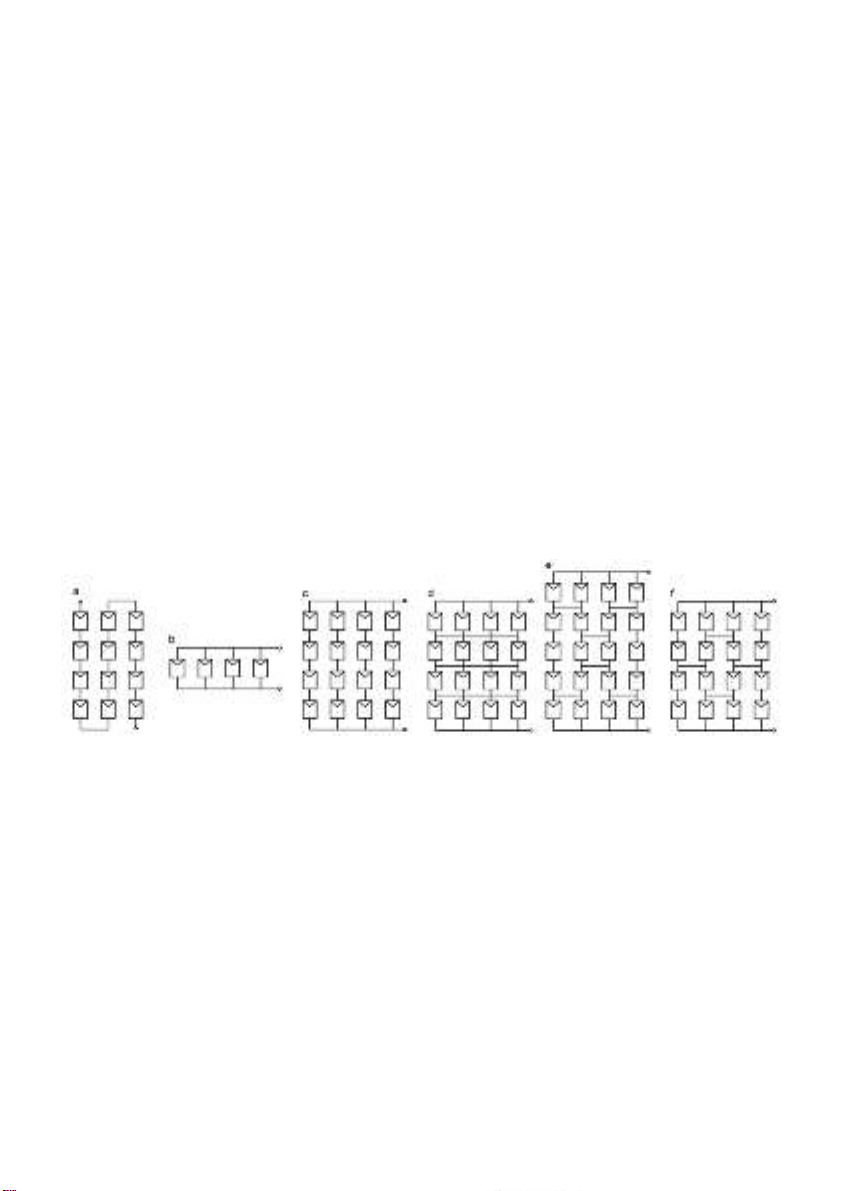
Figure 1-13 shows 6 different connection methods of photovoltaic panels commonly used.
Although there are many special connection structures with lots of advantages being studied
and applied, the most commonly exploited solution currently in practice is SP connection
circuit as Figure 1-13c and TCT connection circuit as Figure 1-13d.
Hình 1-13. Photovoltaic panel connection circuits; (a) Series array; (b) Parallel array; (c) Series-Parallel array
(SP); (d) Total-Cross-Tied array (TCT); (e) Bridge-Link array; (f) Honey-Comb array
1.1.5 Basic structure of grid-connected solar system with power storage
There are three main parts: photovoltaic panels connection array, converters and load (local
load or grid). In addition, extra batteries can be used for storage and power stabilization
purposes.
1.2 Introduction to the system performance improvement strategy under partial
shading conditions.
1.2.1 Effects of partial shading
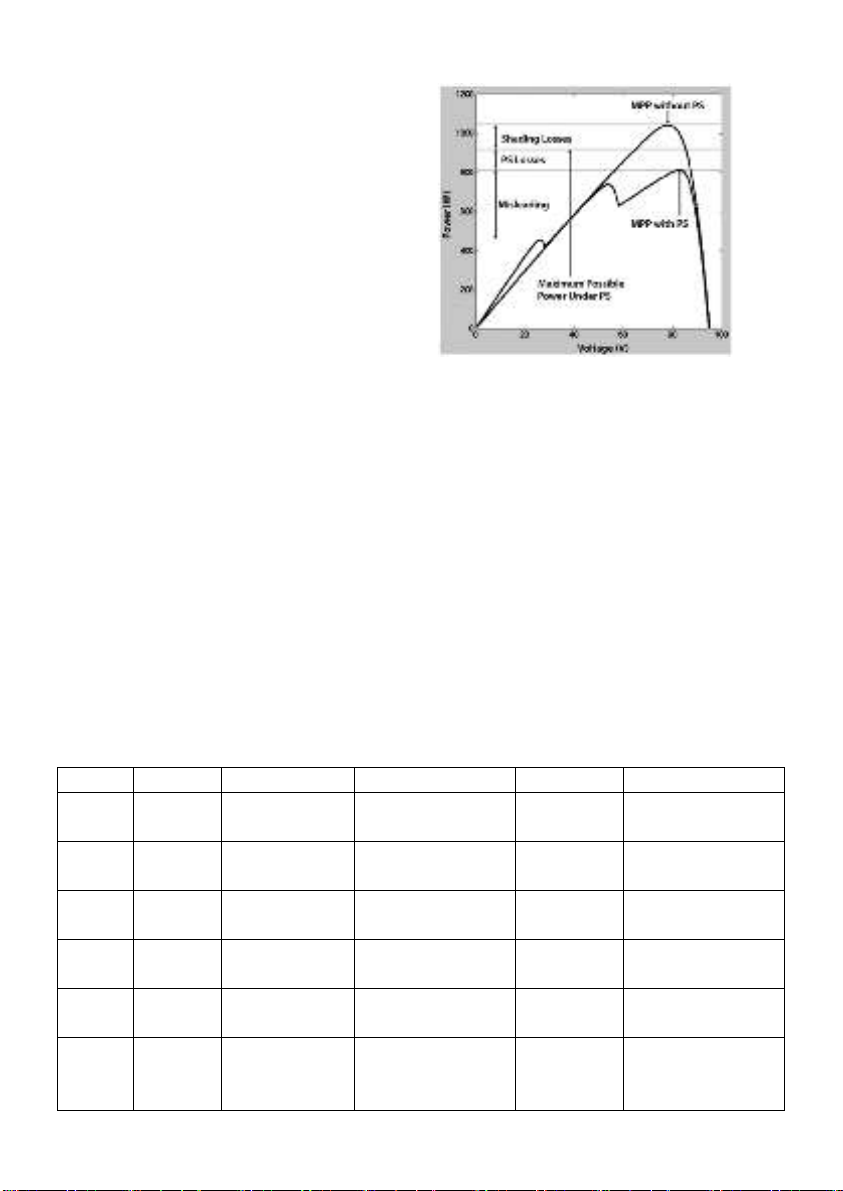
The reduction in capacity of the solar system in the context of shading is shown in Figure
1-21. In the context of partial shading, the system capacity shows a significant decrease, in
addition to the phenomenon of misleading (confusion due to the maximum power point).
3
1.2.2 Power attenuation minimization techniques due to the partial shading
Currently, the studies to reduce the loss of
solar energy system in the world are
classified into three main groups:
Distributed MPP, multi-level converter
and solar system restructuring method.
Photovoltaic panel circuits restructuring
was first proposed by Salameh et al., used
for the operation and speeding of electric
vehicles using solar panels. Sherif and
Boutros did propose the photovoltaic
panel circuits restructuring by using
transistors and circuit breakers.
Figure 1-21. Shading, partial shading, and misleading
losses for a photovoltaic array.
Shading, partial shading, and misleading losses for a photovoltaic array.
Nguyen and Lehman used the restructuring circuit inside the photovoltaic panels and
proposed two optimal algorithms to control the restructuring circuit. Velasco et al. applied
the restructuring method to the grid system and proposed a mathematical model for it.
However, all is only at the local optimal level, instead of offering an overall optimal
configuration. Velasco proposed the EI (Equalization Index), understood as the difference
between the row with the highest total solar irradiance compared to the row with the lowest
total solar irradiance; accordingly, the configuration with the lowest EI is known as the
overall optimal configuration. The most optimal configuration requires the minimum
illumination difference level received by the photovoltaic panels in each parallel circuit.
1.2.5 Comparison of methods presented
The methods in the solar system restructuring strategy have different advantages and
disadvantages, as shown in Table 1-9 below.
Table 1-9. Comparison of irradiance equalization algorithms using TCT connection circuit
Tác giả
Chiến lược
Thuật toán điều khiển
Số khóa
Yêu cầu dữ liệu
Ghi chú
Velasco-
Quesada
Irradiance
equalization
-
2.NPV.m-throw
current, voltage
static and dynamic part
Romano
Irradiance
equalization
Deterministic and
Random search
NSW = (2.m.NPV)DPST +
(m)SPDT
irradiance
supports row with different
number modules
Storey
Irradiance
equalization
Best worst sorting
NSW = NPV.(m2-m)SPST
current, voltage
supports row with different
number modules
Matam and
Barry
Irradiance
equalization
Arrange in descending
order of radiation
24-DPST relays
current, voltage,
irradiance
Dynamic PV array is formed
using PV modules
Jazayeri
Irradiance
equalization
Reconfiguration
algorithm
-
irradiance
supports row with different
number modules
Mahmoud
and El-
Saadany
Irradiance
equalization
Greedy algorithm
-
irradiance
fixed part along with
adaptive part












![Đề án Thạc sĩ: Đào tạo nhân lực tại Trường Đại học FPT Hà Nội [Tối Ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251217/ocmo999/135x160/82801765957089.jpg)












