
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
154
KHẢO SÁT VÀ THIẾT KẾ BỘ ĐIỀU KHIỂN TỐI ƯU
RÀNG BUỘC CHO HỆ THỐNG MIMO
Phan Thanh Tùng
Đại học Thủy lợi, email: phanthanhtung86@gmail.com
1. GIỚI THIỆU CHUNG
Hiện có rất nhiều phương pháp thiết kế
bộ điều khiển hiện đại như tuyến tính hóa,
PID tách kênh, trí tuệ nhân tạo, mờ…
nhưng chúng chỉ xét đến chất lượng đầu ra
mà không xét đến các điều kiện ràng buộc
về tín hiệu điều khiển. Thực tế, việc điều
khiển trong công nghiệp ngoài yêu cầu tối
ưu về năng lượng tín hiệu điều khiển, còn
bị ràng buộc rất nhiều điều kiện. Chẳng hạn
trong việc điều khiển nồng độ sản phẩm thì
ta không thể thay đổi biến lưu lượng một
cách đột ngột ví như khi mở van thì lưu
lượng dòng chảy tăng từ từ có mức độ
(không thể tăng đột biến vì có thể nếu tăng
đột ngột sẽ sinh ra áp suất chênh lệch lớn
làm hỏng đường ống và van). Nói cách
khác vận tốc thay đổi của biến bị giới hạn
trong một phạm vi nhất định. Bài toán điều
khiển nồng độ sản phẩm trong công nghiệp
điển hình là hệ thống MIMO hai đầu vào
hai đầu ra không chỉ đòi hỏi bám sát giá trị
đặt mà còn yêu cầu tối ưu năng lượng khi
có sự ràng buộc về sự thay đổi. Như vậy ta
cần thiết lập một bộ điều khiển mà nó
tối ưu hóa hàm mục tiêu trong điều kiện
ràng buộc.
Trong công nghiệp hiện nay, một phương
pháp đơn giản, thuận tiện cài đặt, rất được
các kỹ sư công nghệ tin dùng là phương pháp
GPC. Với sự phát triển của máy tính sô thì ưu
điểm chính phương pháp đó là dễ dàng giải
bài toán tối ưu hóa hàm mục tiêu có ràng
buộc. Ở đây ta sẽ sử dụng phần mềm mô
phỏng Matlab để giải quyết bài toán tối ưu
thay cho vi xử lý.
2. GIỚI THIỆU CHUNG
Trong điều kiện bị ràng buộc về tốc độ
thay đổi của tín hiệu điều khiển thì ở đây ta
sẽ xem xét từng thành phần, từng tham số của
bộ điều khiển. Với hàm mục tiêu đã xác lập
về tối ưu năng lượng và khả năng bám giá trị
đặt ta sẽ thu được bộ điều khiển dự báo GPC
mong muốn.
2.1. Mô hình trạng thái tuyến tính đối
tượng MIMO hai đầu vào, hai đầu ra:
d
dt
xAx Bu Ed
y Cx
Trong đó: A,B, E, C là mô hình đối tượng
có sẵn.
10,334 4,050 0
9,834 5,332 3,050
0 1,282 3,550
A
,
1 0 0
0 0 1
C
0,3737 0,4263
0,4263 0,3737
00
B
,
0,3737 0
0,0263 1
00
E
Với: xT = [x1, x2, x3] là vector 3 biến trạng
thái
uT = [u1, u2] là vector 2 đầu vào điều khiển
dT = [d1, d2] là vector 2 nhiễu loạn.
yT = [y1, y2] là vector 2 biến đầu ra.
Bước 1: Gián đoạn hóa mô hình trạng thái
sang mô hình gián đoạn và sau đó xây dựng
mô hình mới:
Đặt:
z(t + 1)T = [x(t +1) ; u(t)] là vector trạng
thái mới.
∆𝒖(𝑡)=𝒖(𝑡)−𝑢(𝑡−1) là chênh lệch
năng lượng điều khiển.
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
155
Ta có :
[𝒙(𝑡+1)
𝒖(𝑡)]
⏟
𝒛(𝑡+1)=[𝑨𝑑𝑩𝑑
𝟎 𝑰]
⏟
𝐴𝑧[𝒙(𝑡)
𝒖(𝑡−1)]
⏟
𝑧(𝑡)+
+[𝑩𝑑
𝑰]
⏟
𝐵𝑧∆𝒖(𝑡)+[𝑬𝑑
𝟎]
⏟
𝐸𝑧𝒅(𝑡)
𝒚(𝑡+1)=[𝑪𝑑𝟎]
⏟
𝐶𝑧[𝒙(𝑡+1)
𝒖(𝑡)]
⏟
𝑧(𝑡+1)
Hay:
( 1) ( ) ( ) ( )
( 1) ( 1)
t t t t
z z z
tt
z
z A z B u E d
y C z
Bước 2: Biết: NY là tầm dự báo kết quả
đầu ra và Nu là tầm điều khiển thì thiết lập
các ma trận Pz, Py, Hz, Hy.
[
𝑧(𝑡+1)
𝑧(𝑡+2)
…
𝑧(𝑡+𝑁𝑦)
]
=
⏟
𝑍
[
𝐴𝑧
𝐴𝑧
2
…
𝐴𝑧𝑁𝑦
]
⏟
𝑃𝑧
𝑧(𝑡) +
+
[
𝐵𝑧
𝐴𝑧𝐵𝑧
…
𝐴𝑧
𝑁𝑦−1𝐵𝑧 0
𝐵𝑧
…
𝐴𝑧
𝑁𝑦−2𝐵𝑧 ⋱ 0
0
…
𝐴𝑧
𝑁𝑦−𝑁𝑢𝐵𝑧
]
⏟
𝐻𝑧[∆𝑢(𝑡)
∆𝑢(𝑡+1)
…
∆𝑢(𝑡+𝑁𝑢−1)]
⏟
∆𝑈
[
𝑦(𝑡+1)
𝑦(𝑡+2)
…
𝑦(𝑡+𝑁𝑦)
]
⏟
=
𝑌
[
𝐶𝑧𝐴𝑧
𝐶𝑧𝐴𝑧
2
…
𝐶𝑧𝐴𝑧
𝑁𝑦
]
⏟
𝑃𝑦𝑧(𝑡)+
+
[
𝐶𝑧𝐵𝑧
𝐶𝑧𝐴𝑧𝐵𝑧
…
𝐶𝑧𝐴𝑧
𝑁𝑦−1𝐵𝑧 𝐶𝑧0
𝐵𝑧
…
𝐶𝑧𝐴𝑧
𝑁𝑦−2𝐵𝑧 ⋱ 0
0
…
𝐶𝑧𝐴𝑧
𝑁𝑦−𝑁𝑢𝐵𝑧
]
[∆𝑢(𝑡)
∆𝑢(𝑡+1)
…
∆𝑢(𝑡+𝑁𝑢−1)]
⏟
Rút gọn lại:
𝑍=𝑃𝑧𝑧(𝑡)+𝐻𝑧∆𝑈
𝑌=𝑃𝑦𝑧(𝑡)+𝐻𝑦∆𝑈
Bước 3: Ta có: Ts: Thời gian trích mẫu,
r1, r2: Giá trị dặt cho đầu vào 1 và 2.
Thiết lập hàm mục tiêu:
𝐽=‖𝑅−𝑃𝑦𝑧(𝑡)−𝐻𝑦∆𝑈‖2
2+𝜆‖∆𝑈‖2
2.
Ở đây: R là vector giá trị đặt mong muốn
Hệ số trọng lượng 𝜆 tùy thuộc vào mức độ
tối ưu năng lượng trong hàm mục tiêu.
J là hàm mục tiêu cần tối thiểu.
2.2. Điều kiện ràng buộc delta u: với
∆umin ≤ ∆u ≤ ∆umax
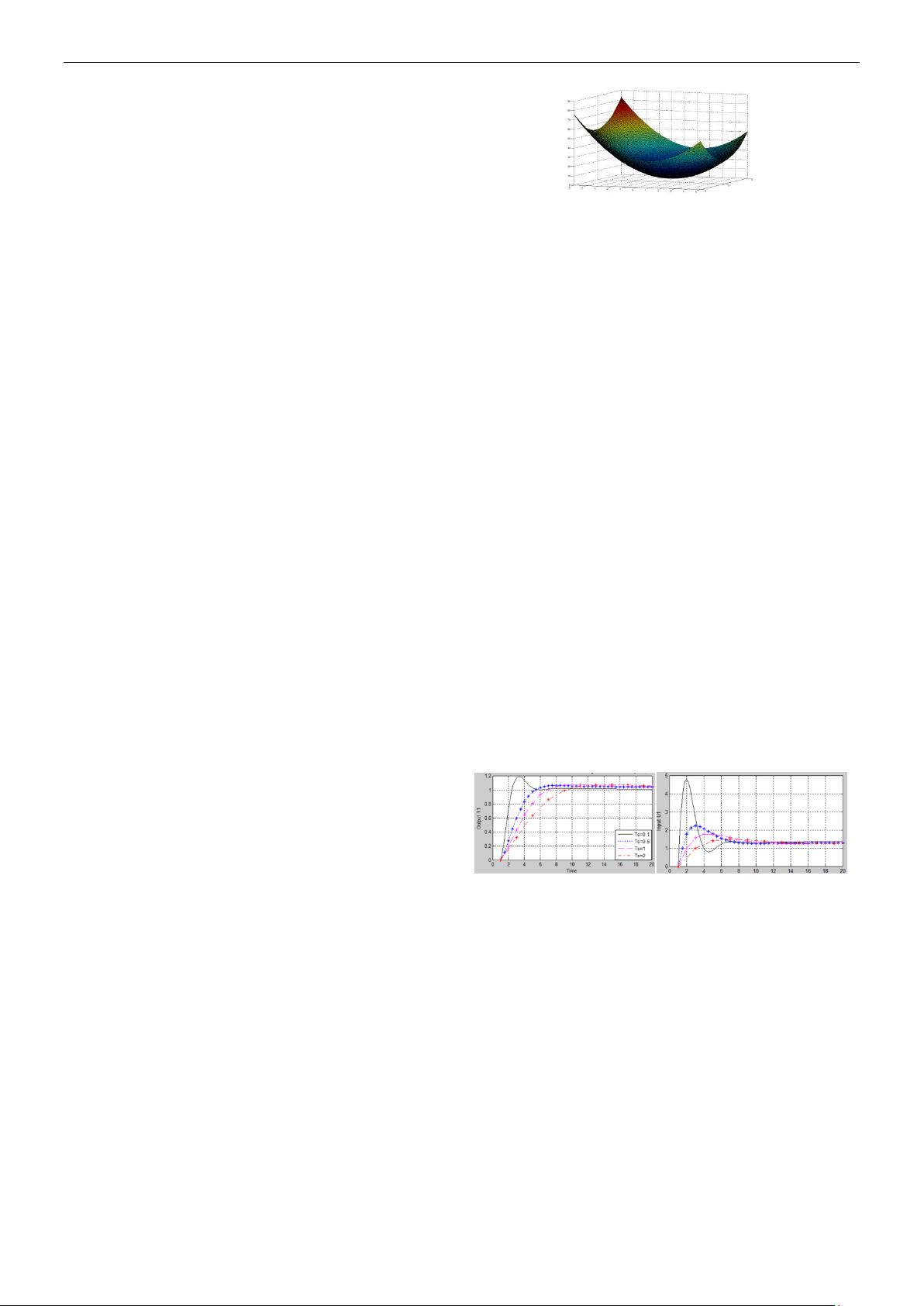
Quan sát đồ thì 3D ta có thể nhận thấy
hàm J có điểm cực tiểu duy nhất do đó ta có
Hình 1: Mô phỏng 3D hàm mục tiêu J
theo hai biến đầu vào không ràng buộc
thể sử dụng hàm tối ưu hóa để tìm điểm cực
tiểu toàn cục mà không phải lo lắng rằng nó
là điểm cực tiểu địa phương. Điều này có thể
chứng minh được nhưng ta không đi chi tiết
vào đây. Ngoài ra từ điều trên nó giúp ta có
thể chọn điểm xuất phát Uo bất kì để đi tìm
điểm cực tiểu (nếu có nhiều điểm cực tiểu thì
việc chọn Uo rất quan trọng).
Lưu ý giá trị tối ưu trong điều kiện ràng
buộc không phải là giá tị tối ưu khi không
ràng buộc rồi gán thêm vào 1 khâu hạn chế
độ lớn. Ở đây không phải cho tín hiệu điều
khiển U bị hạn chế dưới 1 thì ra kết quả tối
ưu: [1.0305 -0.0992] bị khâu chặn thành
[1.00 -0.0992] ≠ giá trị tối ưu ràng buộc
[1.00 -0.1005].
2.3. Khảo sát tham số thời gian trích mẫu
Đầu tiên ta sẽ xem xét ảnh hưởng của sự
thay đổi thời gian trích mẫu Ts lên đặc tính
động học của hệ thống từ đó lựa chọn chu kỳ
trích mẫu Ts hợp lý.
Hình 2: Đáp ứng hệ thống khi thay đổi Ts.
Nhận xét: Hệ nhanh chóng bám giá trị đặt
hơn khi chu kì trích mẫu Ts càng nhỏ và có
thời gian quá độ giảm xuống. Ta dễ dàng giải
thích được vì trong cùng một khoảng thời
gian thì khi Ts nhỏ thì càng phải tính toán
nhiều lần và thay đổi tín hiệu đầu vào U1
nhiều lần hơn so với Ts lớn. Do ràng buộc về
thay đổi độ lớn ∆U trong khoảng [-1 1] khá
lớn và khi thời gian chu kì trích mẫu chọn
càng nhỏ thì nó cũng gần giống với khi
không bị ràng buộc vì trong cùng một khoảng
thời gian tín hiệu U đều có thể tăng khá cao.
Nếu ta giảm khoảng giới hạn delta U thì kết
quả sẽ khác hơn.
Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
156
Do vậy khi bám giá trị đặt nhanh thì ta
phải trả giá bằng khối lượng tính toán nhiều
hơn và đặc biệt quan trọng là tín hiệu điều
khiển tăng rất vượt quá mức cho phép. Từ đó
ta phải cân nhắc ở 2 điều này để tìm ra chu kì
trích mẫu Ts hợp lí để tín hiệu điều khiển U
không quá lớn và ta chọn Ts=1s khiến cho
khối lượng tính toán trở nên nhẹ nhàng và
biên độ đầu vào không quá lớn.
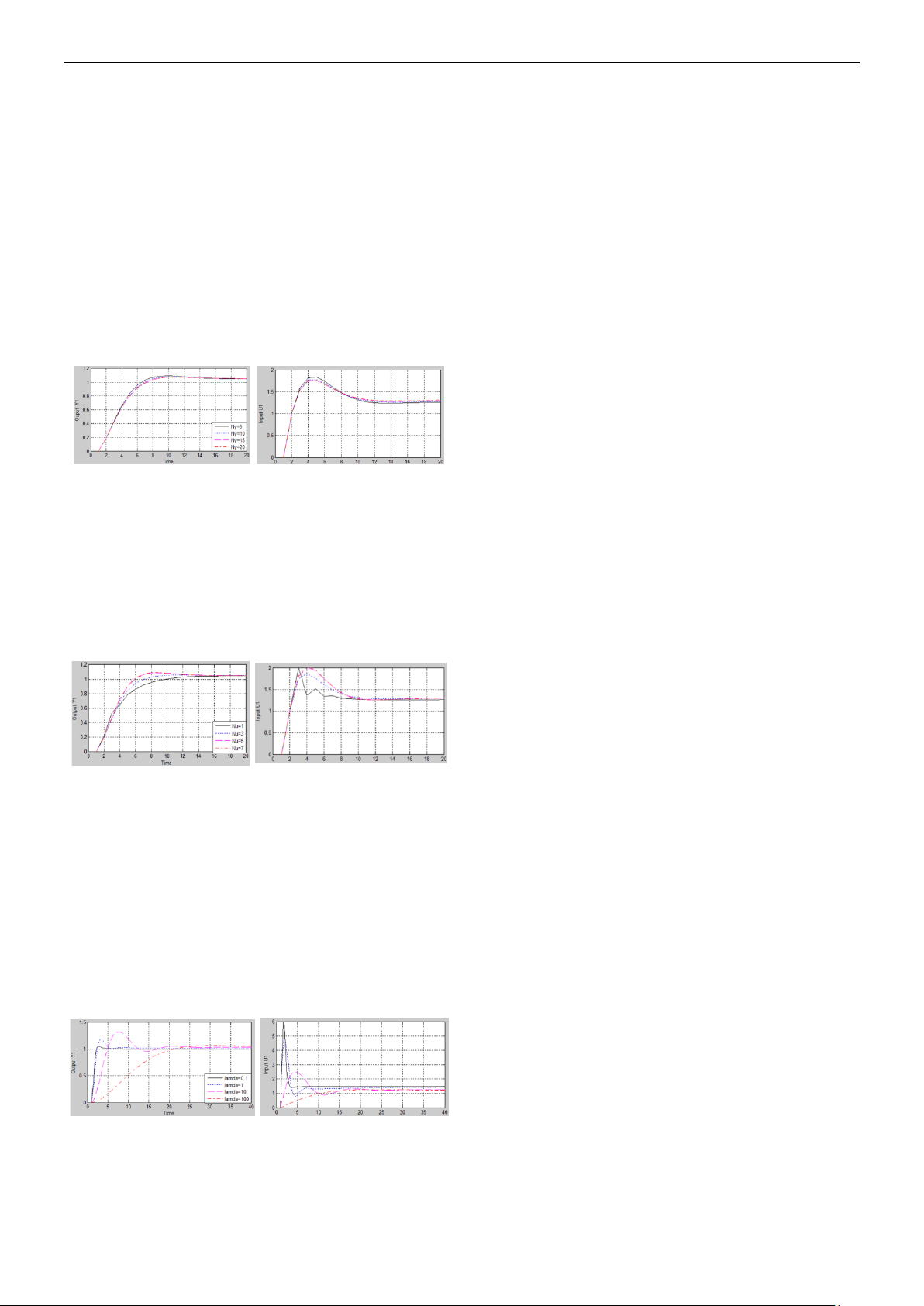
2.4. Thay đổi tầm dự báo Ny với Ts=1s,
Nu=5,
1
Hình 3: Đáp ứng hệ thống khi thay đổi Ny
Nhận xét: Từ đồ thị ta thấy khi Ny>5 thì
có sự giống nhau cho tất cả các quỹ đạo của
hệ và tín hiệu điều khiển. Vậy để giảm khối
lượng tính toán của vi xử lí ta chọn Ny=10
mà không làm giảm chất lượng điều khiển.
Thay đổi Nu với Ts=1, Ny =10,
0,1
;
Hình 4: Thay đổi Nu
Nhận xét: Với Nu >3 thì đầu ra cho đáp
ứng khá giống như nhau và tín hiệu điều
khiển có sự thay đổi độ lớn vừa phải tạm
chấp nhận được.
Khi Nu=1 (tầm điều khiển ngắn tương tự
deadbeat) khiến tín hiệu điều khiển lớn và có
biên độ dao động cao.
2.5. Thay đổi lamda λ
Hình 5: Khi trọng số lamda thay đổi
Nhận xét: Dễ dàng thấy được hệ thống đáp
ứng càng nhanh, càng bám giá trị đặt và độ
quá điều chỉnh thấp khi lamda càng nhỏ thì
nhưng ta phải trả giá tín hiệu điều khiển ban
đầu lại tăng lớn và giá trị đỉnh cao hơn nhiều
lần so mức trung bình. Điều này có thể giải
thích vì tín hiệu điều khiển lớn thì hệ mới
nhanh chóng tiến tới giá trị đặt và khi lamda
nhỏ hay sai lệch điều khiển bị đánh giá thấp
trong hàm mục tiêu thì nó có biến động tăng
trưởng lớn.
3. SO SÁNH VÀ ĐÁNH GIÁ KẾT QUẢ
Nếu giảm thời gian trích mẫu Ts xuống thì
hệ đáp ứng càng nhanh, và cho sai lệch tĩnh ít
nhưng tín hiệu điều khiển U tăng nhiều và
yêu cầu tăng tốc độ vi xử lý.
Khi Nu>3 thì các đặc tính của hệ là
tương tự nhau ngoại trừ Nu = 1 thì hệ dao
động nhiều.
Nhằm đảm bảo ổn định thì yêu cầu
Ny>Nu. Với Ny>5 thì đặc tính hệ là tương
đồng. Chọn Nu, Ny càng lớn thì khối lượng
tính toán càng lớn nên ta chọn mức thấp nhấp
mà vẫn thỏa mãn yêu cầu bài toán.
Trọng số lamda () càng thấp thì sai lệch
tĩnh càng nhỏ và khiến cho hệ càng nhanh
chóng bắt kịp giá trị đặt. Ngược lại khi lamda
lớn thì hệ đáp ứng tương đối chậm và làm
tăng sai lệch tĩnh.
4. KẾT LUẬN VÀ KIẾN NGHỊ
Khi kết hợp với máy tính số thì phương
pháp điều khiển dự báo giúp giải các bài toán
tối ưu có rằng buộc trong công nghiệp dễ
dàng hơn. Điều này có ý nghĩa rất lớn trong
việc điều khiển các quá trình công nghiệp mà
ở đó các bộ điều khiển khác không đáp ứng
được yêu cầu.
5. TÀI LIỆU THAM KHẢO
[1] Rossiter: Model based Predictive Control -
Prentice Hall, 2009.
[2] Hoàng Minh Sơn: Cơ sở hệ thống điều
khiển quá trình. NXB KHKT 2006.
[3] Nguyễn Doãn Phước, Phan Xuân Minh: Lý
thuyết điều khiển tuyến tính. NXB Khoa
học và Kỹ thuật, 2003.
[4] Robert H. Bishop: Modern Control System,
Prentice Hall, 2012.

Tuyển tập Hội nghị Khoa học thường niên năm 2015. ISBN: 978-604-82-1710-5
1










![Giáo trình Thực hành Truyền động điện Trường Đại học Bà Rịa - Vũng Tàu [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/11121773283865.jpg)
![Giáo trình Thực hành SCADA Trường Đại học Bà Rịa - Vũng Tàu [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/94061773283866.jpg)
![Tài liệu học tập La bàn từ [mô tả/định tính]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260310/hoaphuong0906/135x160/25191773287376.jpg)

![Tài liệu học tập Thiết kế hệ thống nhúng [mới nhất, đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/37051773135929.jpg)







![Giáo trình Điều khiển khí nén thuỷ lực Phần 2: [Mô tả/Chủ đề cụ thể của phần 2]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/11911772768225.jpg)
![Giáo trình Điều khiển khí nén thuỷ lực Phần 1: [Mô tả/Định tính thêm nếu cần]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/51511772768225.jpg)
![Giáo trình Điều khiển số Phần 2: [Thêm từ khóa mô tả nội dung chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260302/camtucau2026/135x160/37201772766913.jpg)
