Nội dung
1Tổng quan
2Bài toán K-coverage trong mạng cảm biến không dây
3Bài toán Q-coverage và Q-connectivity trong mạng cảm biến không dây
Giới thiệu bài toán
Các nghiên cứu liên quan
Mô hình bài toán
Giải thuật đề xuất
Thực nghiệm
4Bài toán tối ưu thời gian bao phủ của mạng cảm biến
75 / 152
Bài toán Q-coverage
Bài toán tổng quát hơn của bài K-coverage: mỗi mục tiêu có độ quan
trọng khác nhau.
76 / 152
Bài toán Q-coverage
Hình 31: Mô hình mạng cảm biến Q-coverage
77 / 152
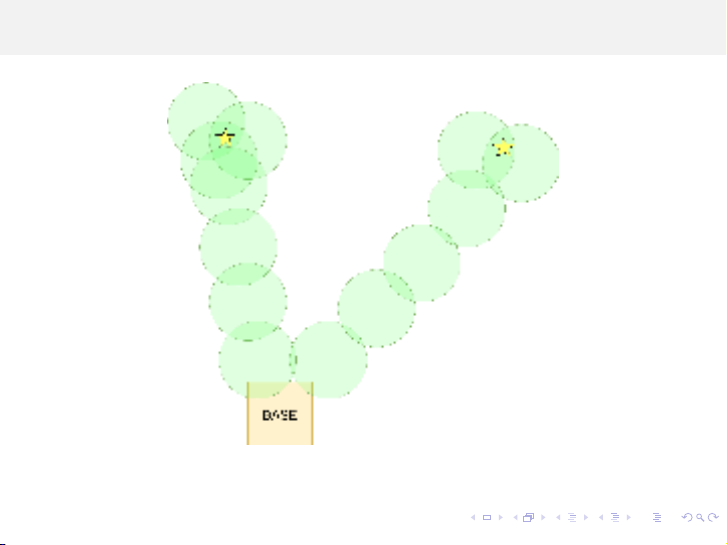
Bài toán Q-connectivity
Trong bài Q-coverage, mục tiêu được theo dõi bởi nhiều cảm biến,
nhưng có thể chỉ có 1 đường kết nối đến trạm cơ sở.
Nếu một nút bất kỳ trên đường truyền bị chết, kết nối giữa mục tiêu
và trạm cơ sở sẽ không còn
Để mạng thực sự có khả năng chịu lỗi, cần xây dựng nhiều đường đi
hơn từ mục tiêu về trạm cơ sở.
Nhận xét: Nếu mạng cảm biến là Q-connectivity, mạng cũng là
Q-coverage.
78 / 152
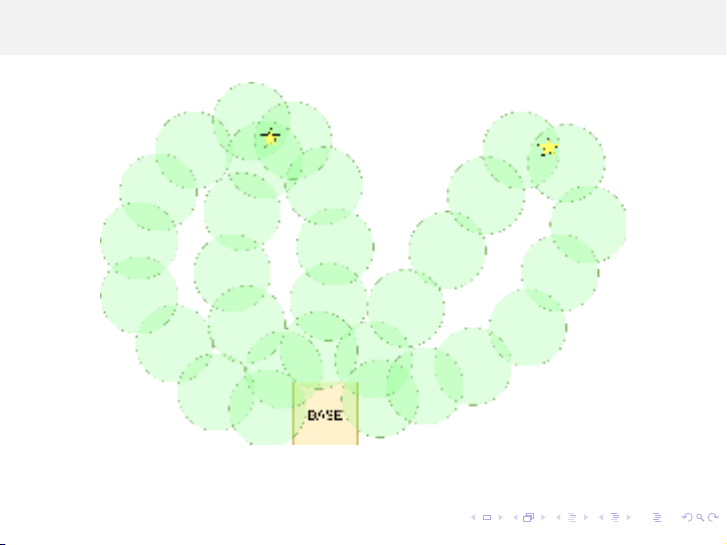
Bài toán Q-connectivity
Hình 32: Mô hình mạng cảm biến Q-coverage kết hợp với Q-connectivity
79 / 152

























