1
I TOÁN THIẾT KẾ HỆ THỐNG
Nội dung bài toán:
Cho một dây chuyền công nghệ (Process = System+Signal) với dự toán tiềm năng,
kinh phí xác định cùng với chỉ tiêu chất lượng sản phẩm cho trước. Yêu cầu Thiết
kế hệ thống điều khiển tự động cho dây chuyền đảm bảo chất lượng sản phẩm đạt
được những yêu cầu đặt ra.
Phương hướng giải quyết:
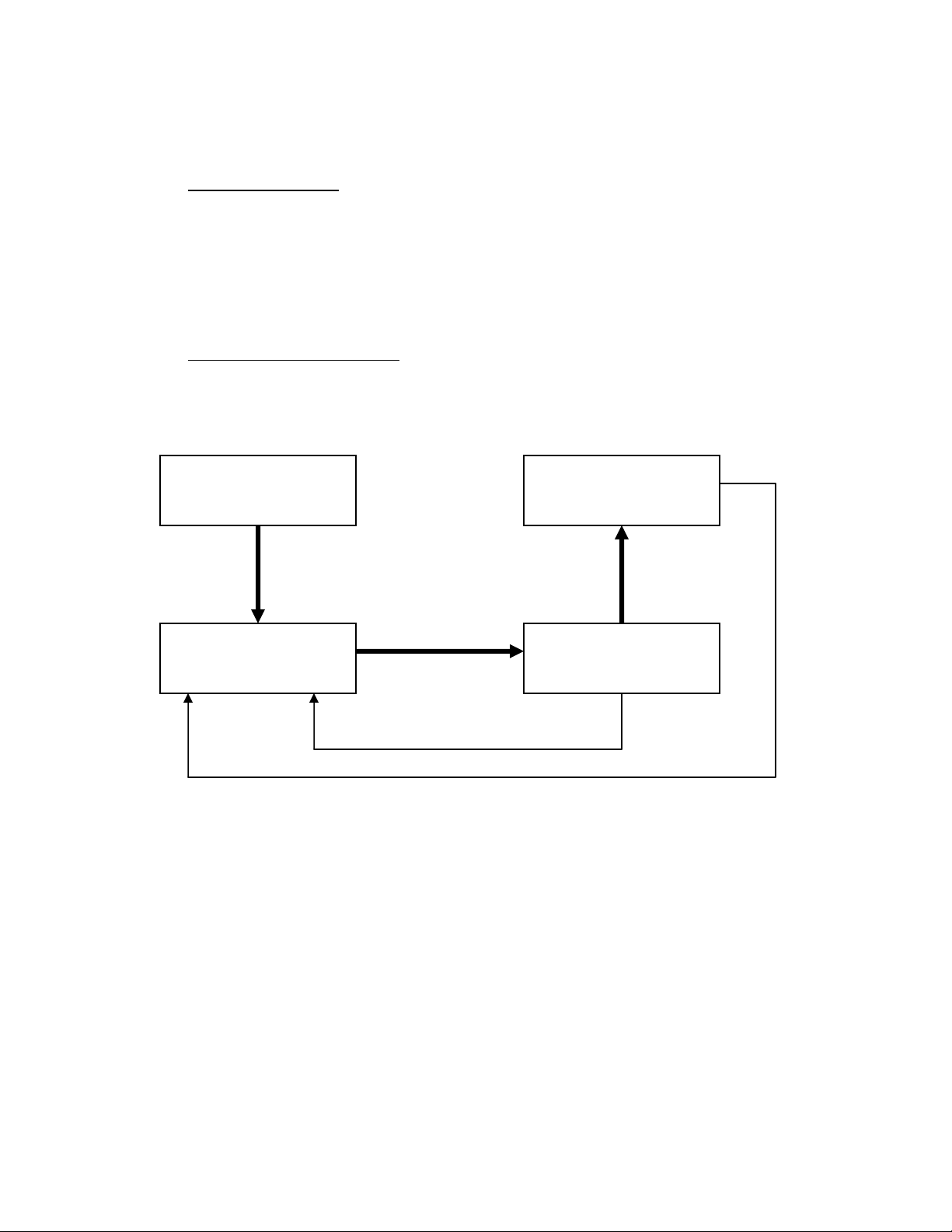
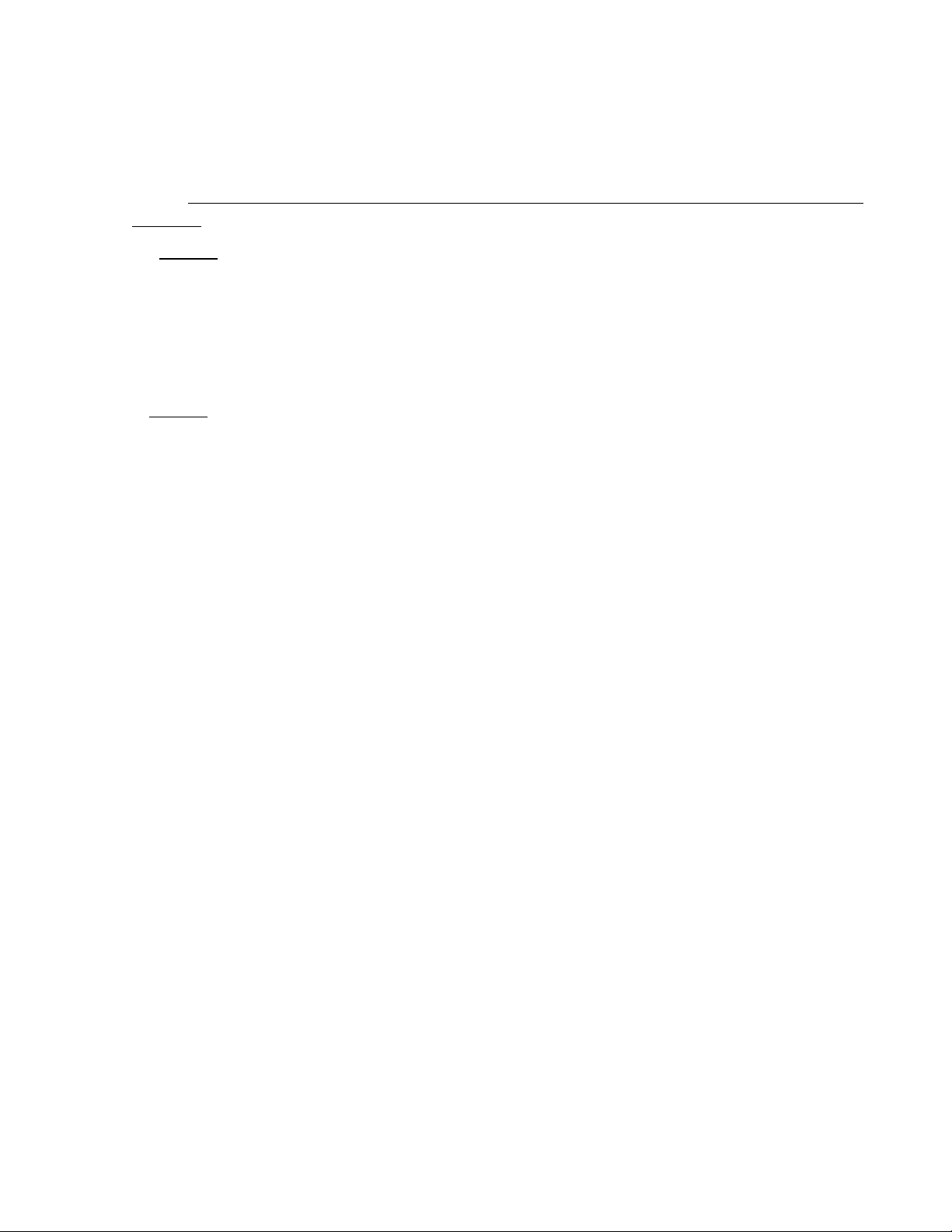
Từ nội bài toán yêu cầu, ta thấy rằng chu trình giải quyết như sau:
Quá trình được bắt đầu từ bước phân tích nội dung bài toán, từ đó ta đưa ra được
một mô hình hệ thống điều khiển, để kiểm tra ta thiết kế hệ trên máy tính và chạy mô
phỏng. Nếu hệ thống mô phỏng thoả mãn những chỉ tiêu đặt ra thì ta đi đến thiết kế, xây
dựng hệ thống trên thực tế, còn nếu không đạt yêu cầu ta quay lại giai đoạn phân tích để
tìm ra một mô hình hệ khác. Sau khi đã có hệ thực tế ta phải tiến hành chạy thử nghiệm
hệ thống thực, nếu hệ cũng đạt chất lượng yêu cầu thì ta mới tiến hành lắp đặt hệ thống,
ngược lại thì ta phải quay lại thiết kế mô hình hệ thống cho đến khi tạo ra được hệ thống
thực đạt chất lượng như mong muốn.
Thông thường, để thiết kế được một hệ thống điều khiển tự động thực ta phải mất
rất nhiều thời gian và công sức, đặc biệt là giai đoạn chạy mô phỏng và thử nghiệm để
thay đổi thông số nhằm đạt được những yêu cầu công nghệ. Chính vì vậy vấn đề đặt ra là
Bài toán thực tế
Mô hình hệ thống
ĐKTĐ
Giải pháp thực tế
Mô phỏng
(Phân tích (Thoả
bài toán) mãn)
(Không thoả mãn)
2
ta phải thiết kế được những hệ thống chạy ổn định, chính xác để có khả năng sử dụng lại
trong các trường hợp cần thiết, điều đó sẽ giúp giảm rất nhiều công sức thiết kế, chế tạo.
Qua phân tích trên ta rút ra các bước để thiết kế một hệ thống điều khiển tự động
như sau:
- Bước 1: Phân tích quá trình công nghệ
Nhiệm vụ của bước này là ta phải xác định được các đặc điểm của hệ thống từ yêu cầu
công nghệ đặt ra, bao gồm các công việc chính:
+ Tách các hệ con từ hệ thống lớn(Subsystem).
+ Xác định tín hiệu chủ đạo(Reference signal), tính toán các điểm đặt của hệ
thống(Setpoint).
- Bước 2: Mô hình hoá hệ thống
Kết quả của bước này là ta phải xác định được mô hình toán học cho hệ thống, để thực
hiện điều đó ta phải:
+ Xác định mô hình toán học cho các hệ con.
+ Mô tả toán học liên kết giữa các hệ con.
Để xác định mô hình toán học ta có hai phương pháp:
• Phương pháp lý thuyết:
Mốn xác định được mô hình hệ bằng phương pháp này ta phải biết rõ các quá trình lí -
hoá xẩy ra trong các đối tượng nghiên cứu. Khi đó có hai cách mô tả hệ thống là:
Mô tả hệ thống trong miền thời gian thông qua: Phương trình vi phân của các quá
trình vật lí hoặc ma trận trạng thái của các biến số trạng thái đối tượng.
Mô tả hệ thống trong miền tần số thông qua: Hàm truyền đạt thể hiện quan hệ giữa
đầu ra với đầu vào hay bằng đặc tính tần số.
• Phương pháp thực nghiệm:
Là phương pháp xác định mô hình hệ thống thông qua quá trình đo đạc tín hiệu vào, ra
của đối tượng. Với phương pháp này ta không cần phải biết các quá trình xẩy ra trong đối
tượng nhưng lại phải có đối tượng thực để tiến hành thu thập số liệu. Có hai các để xác
định mô hình của hệ khi đó:
Ước lượng mô hình: Xác định mô hình hệ thống trên cơ sở hàm quá độ h(t) hay
theo đặc tính tần số của các đối tượng.
Nhận dạng hệ thống trên cơ sở: Hệ Mờ(FIS) hay mạng Nơron(NN).
Việc sử dụng phương pháp nào là phụ thuộc vào thực tế ta có những gì về hệ thống, nếu
hệ có những đối tượng mà ta đã biết rất rõ thì đơn giản nhất là ta dùng phương pháp lý
thuyết, còn với các đối tượng lạ ta buộc phải sử dụng phương pháp thực nghiệm dĩ nhiên
sẽ tốn kém và mất nhiều thời gian hơn.
3
Dù có sử dụng phương pháp nào thì cuối cùng ta cũng phải có được mô hình hệ thống
với các chỉ tiêu: đơn giản, đầy đủ thông tin và chính xác để phục vụ cho các bước tiếp
theo của quá trình thiết kế.
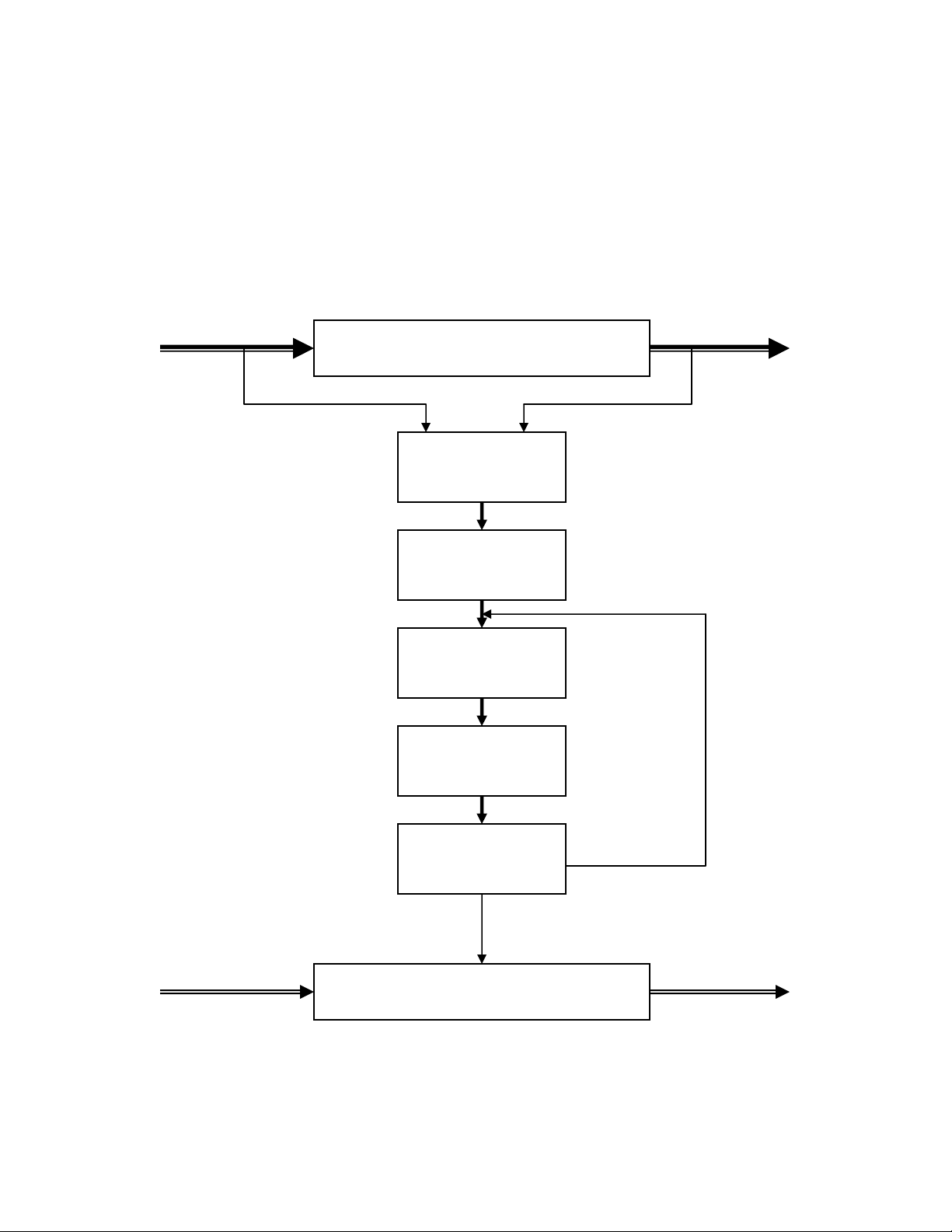
Sơ đồ quá trình xây dựng mô hình hệ thống.
ũ(t) ỹ(t)
Thu thập dữ liệu
thực nghiệm
Xử lý dữ liệu
Process = System + Signal
(
Hệthốn
g
thực
)
Cấu trúc
mô hình
Xác định tham số
Kiểm tra tính trung
thực của mô hình
Mô hình Process = Mô hình System +
Mô hình Signal
u(t) y(t)
Đạt
Không đạt
4
- Bước 3: Thiết kế luật điều khiển
Tuỳ thuộc vào mô hình hệ thống ta vừa tìm được mà ta quyết định chọn luật điều khiển
cho thích hợp. Các luật điều khiển mà ta thường hay sử dụng:
+ Luật điều khiển kinh điển: P, PI, PD hay PID.
+ Luật điều khiển trạng thái: phản hồi trạng thái, bộ quan sát trạng thái.
+ Điều khiển phi tuyến
-> Điều khiển trượt (Sliding Control).
-> Điều khiển tuyến tính hoá chính xác.
-> Điều khiển hàm Gain sheduling.
+ Điều khiển tối ưu.
+ Điều khiển thích nghi.
- Bước 4: Giải pháp kỹ thuật
Lựa chọn cấu trúc phần cứng, phần mềm và cấu trúc điều khiển của hệ thống:
- Cấu trúc điều khiển tập trung:
+ Giải quyết toàn bộ luật điều khiển hệ thống.
+ Đáp ứng tính thời gian thực.
+ Quản lý thích hợp các thiết bị chấp hành và thiết bị cảm biến của hệ.
+ Vị trí địa lý của các thiết bị trường.
- Cấu trúc phân tán:
+ Phân tán về thiết bị điều khiển: mạng bus trường sử dụng Fieldbus, ProfibusDP.
+ Vào ra phân tán: các thiết bị phân tán về địa lý.
- Lựa chọn cấu trúc phần cứng của hệ điều khiển: chọn thiết bị điều khiển có thể là vi xử
lý, vi điều khiển, PLC, biến tần, máy tính công nghiệp IPC hay hệ điều khiển phân tán
DCS…
- Bước 5: Thiết kế phần mềm điều khiển
Bao gồm các bước:
+ Thiết kế phần mềm điều khiển: phần mềm cài đặt trong các thiết bị điều khiển.
+ Thiết kế phần mềm điều khiển và giám sát hệ thống (giao diện SCDA).
Để viết phần mềm: trước tiên ta phải lập lưu đồ chương trình điều khiển hệ thống, phân
chia phần mềm thành các modul nhằm dễ xử lý, viết các modul nhỏ rồi ghép lại thành bộ
phần mềm điều khiển chung.
- Bước 6: Lắp đặt hệ thống, cài đặt phần mềm điều khiển
+ Từ cấu trúc phần cứng, ta lựa chọn và mua các thiết bị để lắp đặt hệ thống. Cài đặt các
phần mềm điều khiển, giám sát cần thiết cho hệ thống.
+ Cho chạy thử và chỉnh định tham số để hệ đạt được điểm làm việc của hệ thống.
Nếu hệ thống đạt các chỉ tiêu chất lượng đề ra thì ta chuyển sang bước sau, còn nếu không
đạt thì ta phải quay về bước 4 để thiết kế lại mô hình hệ thống.
- Bước 7: Viết tài liệu hướng dẫn sử dụng
5
Đây là bước không kém phần quan trọng, vì ta biết rằng dù hệ thống điều khiển có tốt,
hiện đại đến đâu nhưng người sử dụng không biết vận hành, sử dụng thì đó cũng chỉ là
một hệ thống bỏ đi. Chính vì vậy trước khi bàn giao hệ thống cho đối tác, ta phải viết tài
liệu sử dụng của hệ thống phần mềm cũng như phần cứng. Không chỉ vậy ta còn phải có
trách nhiệm khi bảo trì, bảo dưỡng cho hệ thống.
Trên đây là bảy bước cơ bản của quá trình thiết kế một hệ thống điều khiển điều khiển tự
động trong thực
CHƯƠNG I
XÂY DỰNG MÔ HÌNH TOÁN HỌC CHO ĐỐI TƯỢNG ĐIỀU KHIỂN
I. Đặt vấn đề:
Để thiết kế một hệ thống điều khiển trước hết ta phải biết trong hệ thống thì đối tượng
cần được điều khiển là gì, có đặc tính như thế nào...Mà các đặc điểm này được thể hiện
qua mô hình của đối tượng đó. Chính vì vậy Xây dựng mô hình toán học cho đối tượng là
bước làm đầu tiên, rất quan trọng trong quá trình thiết kế hệ thống.
Mô hình toán học là hình thức biểu diễn lại những hiểu biết của ta về hệ thống một cách
khoa học nhằm phục vụ mục đích mô phỏng, phân tích và tổng hợp bộ điều khiển cho hệ
thống. Xây dựng mô hình toán học của đối tượng hiểu đơn giản là đi tìm các phương trình
toán học mô tả quan hệ giữa đầu ra của đối tượng là đại lượng cần điều khiển với đầu vào
là tín hiệu điều khiển.
Một ví dụ đơn giản như ta không thể điều khiển tốc độ một động cơ n(t) mà không biết
mối quan hệ giữa tốc độ động cơ phụ thuộc như thế nào đối với tín hiệu điều khiển là điện
áp u(t) hoặc dòng điện i(t), hay nói cách khác là không biết mô hình toán học của đối
tượng.
Hiện nay có hai phương pháp cơ bản để xây dựng mô hình toán học cho đối tượng điều
khiển là: Phương pháp lý thuyết và phương pháp thực nghiệm.
- Phương pháp lý thuyết: là phương pháp thiết lập mô hình dựa trên các quan hệ vật lý,
hóa học xẩy ra bên trong đối tượng các quan hệ này được mô tả dưới dạng các phương
trình toán học. Để xây dựng được mô hình toán học cho đối tượng bằng phương pháp này
đòi hỏi ta phải biết rõ về những quá trình lý hoá diễn ra trong đối tượng như thế nào, điều
này trong thực tế rất ít khi có được, vì vậy phương pháp này chỉ áp dụng được cho một
vài đối tượng điển hình như: động cơ, van thuỷ lực, mạch điện…
- Phương pháp thực nghiệm: Là phương pháp xây dựng mô hình toán học cho đối tượng
thông qua quá trình quan sát các tín hiệu vào ra, từ đó tìm ra mối quan hệ giữa các đại
lượng cần thiết. Phương pháp này sử dụng trong trường hợp ta không biết rõ về các quá
trình lý hoá xẩy ra trong đối tượng như thế nào, hay các hiểu biết về đối tượng chưa đủ để
ta có thể xây dựng được mô hình của đối tượng đó. Bằng cách đo tín hiệu vào và tín hiệu
ra ta vẽ lên các đường đặc tính vào ra cần thiết, rồi so sánh với lớp các mô hình thích hợp
có sẵn từ đó ta đưa ra được một mô hình gần đúng về đối tượng sao cho sai lệch giữa đối

















![Ô nhiễm môi trường không khí: Bài tiểu luận [Nổi bật/Chi tiết/Phân tích]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251011/kimphuong1001/135x160/76241760173495.jpg)