TR NG Đ I H C HÀNG H IƯỜ Ạ Ọ Ả
KHOA ĐI N – ĐI N T TÀU BI NỆ Ệ Ử Ể
THI T K MÔN H CẾ Ế Ọ
T NG H P H ĐI N CỔ Ợ Ệ Ệ Ơ
Đ s 49 : Cho h truy n đ ng nh hình v . Đ ng c truy n đ ngề ố ệ ề ộ ư ẽ ộ ơ ề ộ
ph i nâng v t có t i tr ng P theo yêu c u – gia t c khi nâng không quáả ậ ả ọ ầ ố
1.5m/s2. Yêu c u đi u khi n v trí c a v t c n nâng. Đ ng c truy nầ ề ể ị ủ ậ ầ ộ ơ ề
đ ng là đ ng c m t chi u kích t h n h pộ ộ ơ ộ ề ừ ỗ ợ
Yêu c u n i dungầ ộ Thông s k thu tố ỹ ậ
-Xây d ng mô minh mô hình đ ng c m tự ộ ơ ộ
chi uề
-Xây d ng mô hình đi u khi n truy nự ề ể ề
đ ng cho hộ ệ
-Tính ch n các b đi u khi n ọ ộ ề ể
-Mô ph ng đáp ng trên Simulink và đánhỏ ứ
giá k t quế ả
Pđm=50(kW), T i tr ngả ọ
(1000-1600 kg), v=1.5m/s,
a=1.5m/s2, - Hi u su t cệ ấ ơ
c u (η) 0,85ấ
- T s truy n (i) : 10ỉ ố ề
- Đ ng kính puli (t i):ườ ờ
0,7(m)
Giáo viên h ng d n: TR N TI N L NGướ ẫ Ầ Ế ƯƠ
Sinh viên th c hi n : PH M VĂN PH NGự ệ Ạ ƯƠ
Mã sinh viên : 39201
Nhóm : N03

Đ c ng s bề ươ ơ ộ
Ch ng 1. ươ Gi i thi u chungớ ệ
1.Gi i thi u chung v đ ng c truy n đ ng ớ ệ ề ộ ơ ề ộ
1.1.S l c v đ ng c m t chi uơ ượ ề ộ ơ ộ ề
1.2.Gi i thi u chi ti t h n v đ ng c m t chi uớ ệ ế ơ ề ộ ơ ộ ề
1.2.1. Ph n tĩnhầ hay stato.
1.2.2.Ph n quay hay rotoầ
1.2.3.Nguyên lý làm vi c c a đ ng c đi n m t chi uệ ủ ộ ơ ệ ộ ề
1.2.4. Ph ng pháp kích t c a đ ng c đi n m t chi uươ ừ ủ ộ ơ ệ ộ ề
2. Yêu c u công nghầ ệ
2.1. C c u nâng v t có t i tr ng theo th i gianơ ấ ậ ả ọ ờ
Ch ng 2. Gi i thi u v c u trúc truy n đ ngươ ớ ệ ề ấ ề ộ
2.1.Đ xu t c u trúc chung c a h truy n đ ngề ấ ấ ủ ệ ề ộ
2.2.Các thành ph n c a h truy n đ ng và mô hình toán c a các thành ph nầ ủ ệ ề ộ ủ ầ
2.2.1.B đi u khi nộ ề ể
2.2.2.B bi n đ iộ ế ổ
2.2.3.Đ ng c đi n m t chi u kích t đ c l pộ ơ ệ ộ ề ừ ộ ậ
2.2.4.Thi t b đo l ngế ị ườ
Ch ng 3. T ng h p các b đi u khi n và k t qu mô ph ngươ ổ ợ ộ ề ể ế ả ỏ
3.1.T ng h p các b đi u khi nổ ợ ộ ề ể
3.2. K t qu mô ph ngế ả ỏ
CH NG 1ƯƠ
GI I THI U CHUNGỚ Ệ
1. GI I THI U CHUNG V Đ NG C TRUY N Đ NGỚ Ệ Ề Ộ Ơ Ề Ộ
1.1. S l c v đ ng c đi n m t chi uơ ượ ề ộ ơ ệ ộ ề
a. Khái ni mệ
Đ ngộ cơ đi nệ nói chung và đ ngộ cơ đi nệ m tộ chi uề nói riêng là thi tế đi ntệ ừ
quay, làm vi cệ theo nguyên lý đi nệ t , khiừ đ tặ vào trong từ tr ngườ m tộ
và cho dòng đi nch yệ ạ qua dây d nẫ thì tr ngườ sẽ tác d ngụ m tộ l ctự ừ vào dòn
g đi nệ (vào dây d n)ẫ vàlàm dây d nlàmẫ dây d nẫ chuy nể đ ng.Đ ngộ ộ cơ đi nbiệ
nế đ iổ đi nệ năng thành c năng.ơ
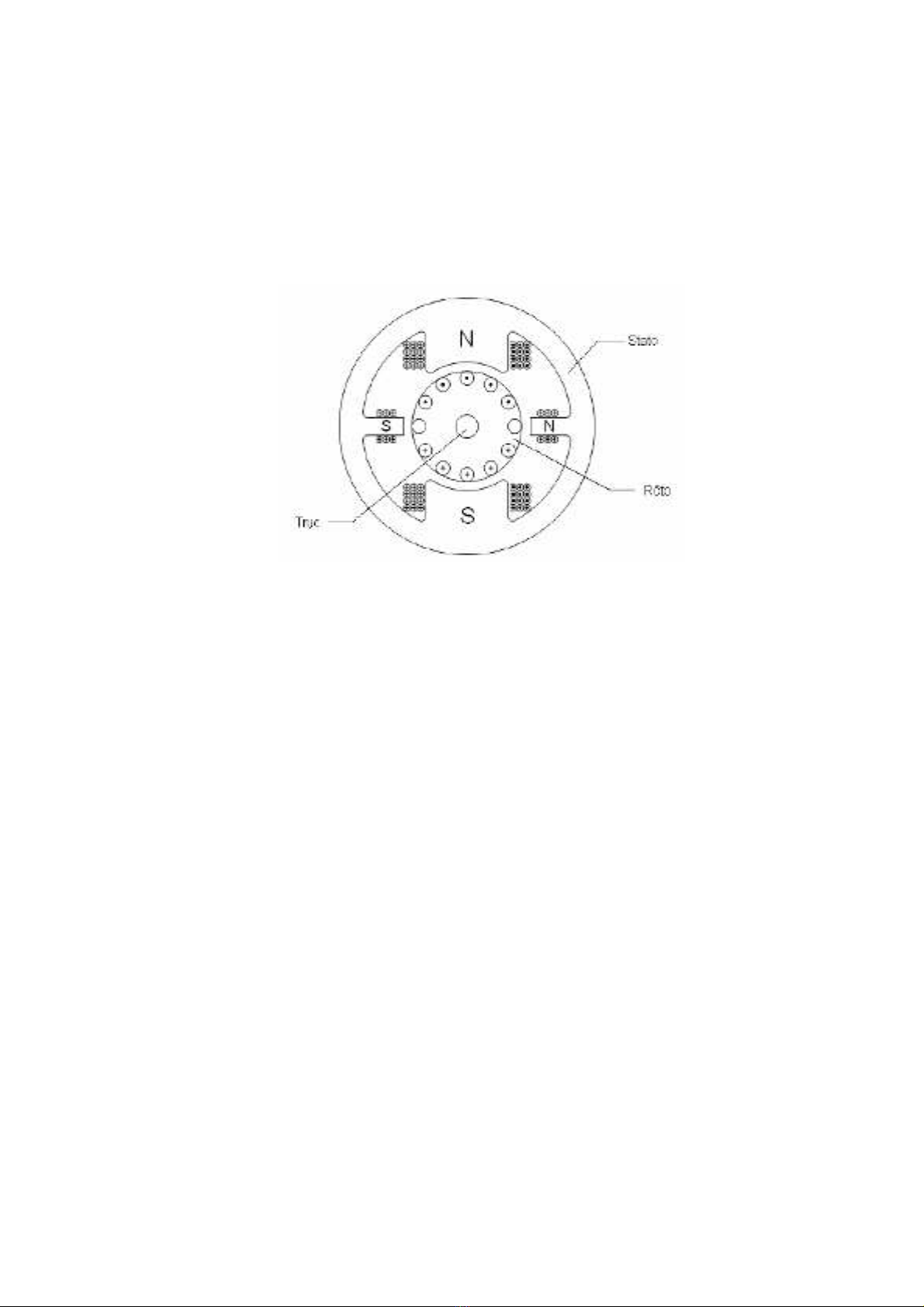
b. C u T oấ ạ
G mồ hai ph n:ầ - ph nầ đ ngứ yên stato (g iọ là ph nầ tĩnh )
- ph nầ chuy nể đ ng rotoộ (g iọ là ph nầ quay )
Hình 1.1: M t c t ngang tr c máy đ ng c đi n m t chi uặ ắ ụ ộ ơ ệ ộ ề
1.2. Gi i thi u chi ti t h n v đ ng c đi n m t chi uớ ệ ế ơ ề ộ ơ ệ ộ ề
1.2.1- Ph n tĩnhầ hay stato.
Hay còn g iọ là ph nầ kích từ đ ngộ c ,làơ bộ ph nậ sinh ra từ tr ng.G m cóườ ồ
m chạ
m chạ từ và dây cu nố kích thích l ngồ ngoài m chạ t (n uừ ế đ ngộ cơ đ ckíchượ từ
b ngằ nam châm đi n)ệ
- m chạ từ đ cượ làm băng s tắ từ (thép đúc,thép đ c )ặ
- Dây qu nấ kích thích hay còn g iọ là dây qu nấ kích từ đ cượ làm b ngằ dây điệ
n
từ (êmay).Các cu nộ dây đi nệ từ nay đ c n iượ ố ti pế v iớ nhau.
a. C cự từ chính
Là bộ ph nậ sinh ra từ tr ngườ g mồ có lõi s tắ c cự từ và dây qu nấ kích từ l nồ
g ngoài
lõi s tắ c cự t .ừ Lõi s tắ c cự từ làm b ngằ nh ngữ lá thép kỹ thu tậ đi nệ hay thép
cacbon dày 0,5 đ nế 1mm Ðp l iạ và tán ch t.Trongặ đ ngộ cơ đi nệ nhỏ có thể dù

ng thép kh i.ố C cự từ
từ đ cượ g nắ ch tặ vào vỏ máy nhờ các bulông. Dây qu nấ kích từ đ cượ qu nấ
b ngằ dây đ ngồ b cọ cách đi nệ và m iỗ cu nộ dây đ uề đ c b c cách đi nượ ọ ệ
kỹ thành m tộ kh iố t mẩ s nơ cách đi nệ tr cướ khi đ tặ trên các c cự t .ừ Các cu nộ
dây kích từ đ cượ đ t trênặ các c c tự ừ này đ c n iượ ố ti pế v iớ nhau.
b. C cự từ phụ
C cự từ ph đ cụ ượ đ tặ trên các c cự từ chínhvà dùng để c iả thi nệ đ i chi u.ổ ề
Lõi thép c aủ c cự từ phụ th ngườ làm b ngằ thép kh iố và trên thân c cự từ phụ
có đ t dây qu nặ ấ
mà c uấ r oạ gi ngố như dây qu nấ c cự từ chính. C cự từ phụ đ c g n vào vượ ắ ỏ
máy nh nh ng bulông.ờ ữ
c. Gông từ
Gông từ dùng làm m chạ từ n iố li nề các c cự t ,ừ đ ngồ th iờ làm vỏ máy.
Trong đ ngộ cơ đi nệ nhỏ và v aừ th ngườ dùng thép dày u nố và hàn l i.ạ
Trong máy đi nệ l nớ
th ngườ dùng thép đúc. Có khi trong đ ngộ cơ đi nệ nhỏ dùng gang làm vỏ máy.
d. Các b ph n khácộ ậ
Bao g m:ồ
- N pắ máy : Để b oả vệ máy kh iỏ nh ngữ v tậ ngoài r iơ vào làm hư h ngỏ dây
qu nấ
và an toàn cho ng iườ kh iỏ ch mạ vào đi n.ệ Trong máy đi nệ nhỏ và v aừ n pắ má
y còncó tác d ngụ làm giá đỡ ổ bi.
Trong tr ngườ h pợ này n pắ máy th ngườ làm b ngằ gang
- Cơ c uấ ch iổ than: để đ aư dòng đi nệ từ ph nầ quay ra ngoài. Cơ c uấ ch iổ
Than bao g mồ có ch iổ than đ tặ trong h pộ ch iổ than nhờ m tộ lò xo tì ch y lênặ
c góp.ổ H pộ ch iổ than đ cượ cố đ nhị trên giá ch iổ than và cách đi nệ v iớ
giá. Giá ch iổ
than có thể quay đ cượ để đi uề ch nhvỉ ị trí ch iổ than cho đúng ch .Sauỗ khi đi uề
ch nh xongỉ thì dùng vít cố đ nhị l i.ạ

1.2.2.Ph n quayầ hay rôto.
Bao g mồ nh ngữ bộ ph nậ chính sau :
Là ph nầ sinh ra su tấ đi nệ đ ngộ .G mồ có m chạ từ đ cượ làm b ngằ v tậ li uệ s tắ
t (láừ thép kĩ thu tậ ) x pế l iạ v iớ nhau .Trên m chạ từ có sẻ rãnh đẻ l ngồ dây
qu nấ ph nầ ngứ (làm b ngằ daay đi nệ từ ).
Cu nộ dây ph nầ ngứ g mồ nhi uề bôi dây n iố v iơ nhau theo mét qui lu tậ nh tấ
đ nh.M iị ỗ b iố dây g mồ nhi uề vòng dây các đ u dây c a b iầ ủ ố dây đ cượ
n iố v iớ các phi nế đ ngồ g iọ là phi nế góp .
Các phi nế góp đó đ cượ ghép cách đi nệ v iớ nhau và cách đi nệ v iớ tr cụ
g iọ là cổ góp hay vành góp.
Tỳ trên cổ góp là c pặ tr iổ than làm b ngằ than graphit và đ cượ
ghép sát vào thành cổ góp nhờ lò xo.
a. Lõi s t ph n ngắ ầ ứ
Dùng để d nẫ t .ừ Th ngườ dùng nh ngữ t mấ thép kỹ thu tậ đi nệ dày
0,5mm phủ
cách đi nệ m ngỏ ở hai m tặ r iồ Ðp ch tặ l iạ để gi mả t nổ hao do dòng đi nệ xoáy
gây nên.
Trên lá thép có d pậ hình d ngạ rãnh để sau khi Ðp l iạ thì d tặ dây qu nấ vào.
Trong nh ngữ đ ngộ cơ trung bình trở lên ng iườ ta còn d pậ nh ngữ
lỗ
thông gió để khi Ðp l iạ thành lõi s tắ có thể t oạ đ cượ nh ngữ lỗ thông gió d cọ t
r c.ụ
Trong nh ngữ đ ngộ cơ đi nệ l nớ h nơ thì lõi s tắ th ngườ chia thành nh ngữ
đo nạ
nh ,ỏ gi aữ nh ngữ đo nạ đó có để m tộ khe hở g iọ là khe hở thông gió. Khi máy
làm vi c gióệ th iổ qua các khe hở làm ngu iộ dây qu nấ và lõi s t.ắ
























![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)