GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 223
Động học nghiên cứu chuyển động về mặt hình học
(không xét nguyên nhân gây ra chuyển động).
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 224
Chương 3
(Các công thức trong chương này đã được chứng
minh, người đọc công nhận để vận dụng)
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 226
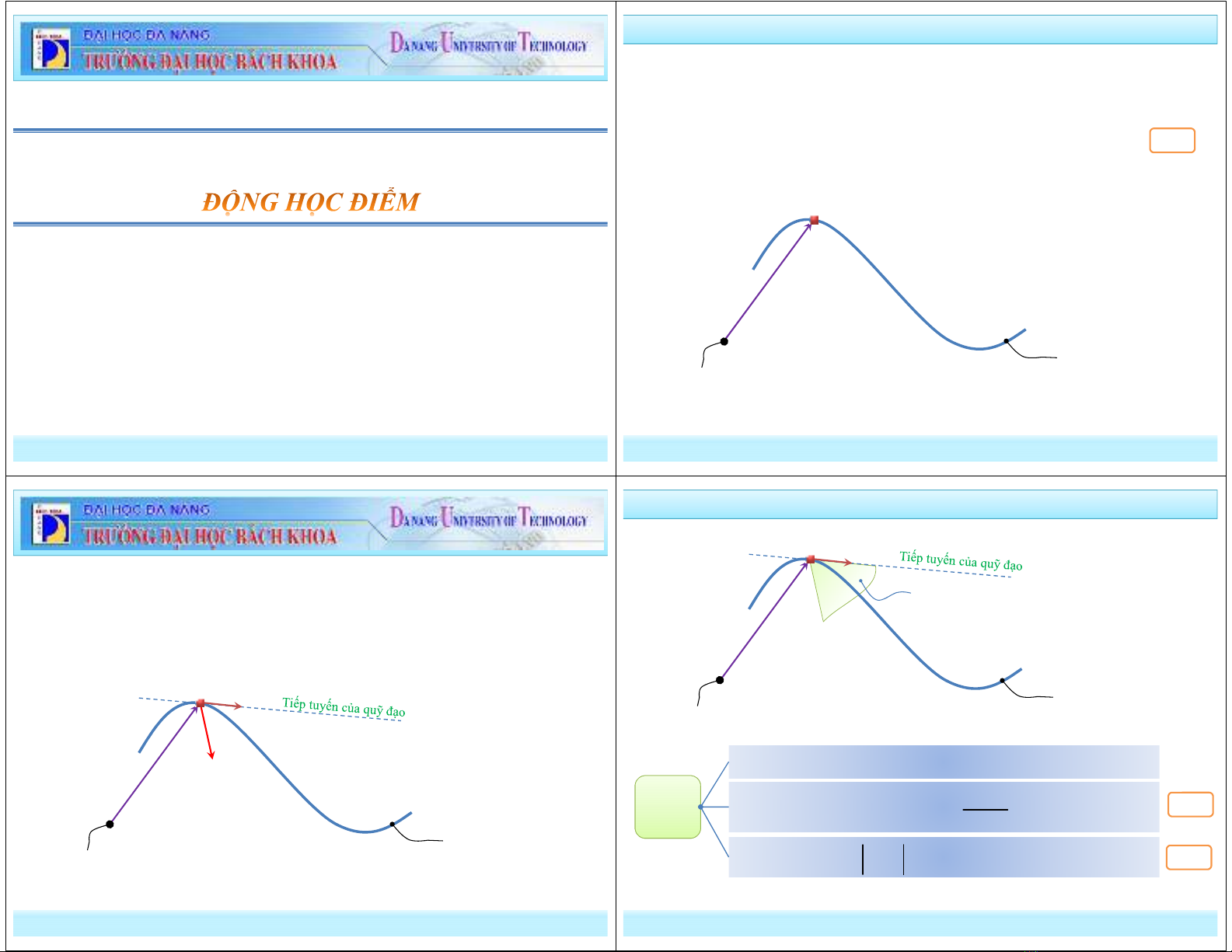
+ Chọn O là gốc cố định
+ M: động điểm
+ : phương trình chuyển động
1. Phương trình chuyển động
( )
OM r r t
= =
3.1
M
Qũy đạo chuyển động
r
O
Cố định
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 225
§1. Khảo sát chuyển động của điểm bằng
phương pháp véc tơ
M
r
v
=
ɺ
Qũy đạo chuyển động
r
r
a
=
ɺɺ
O
Cố định
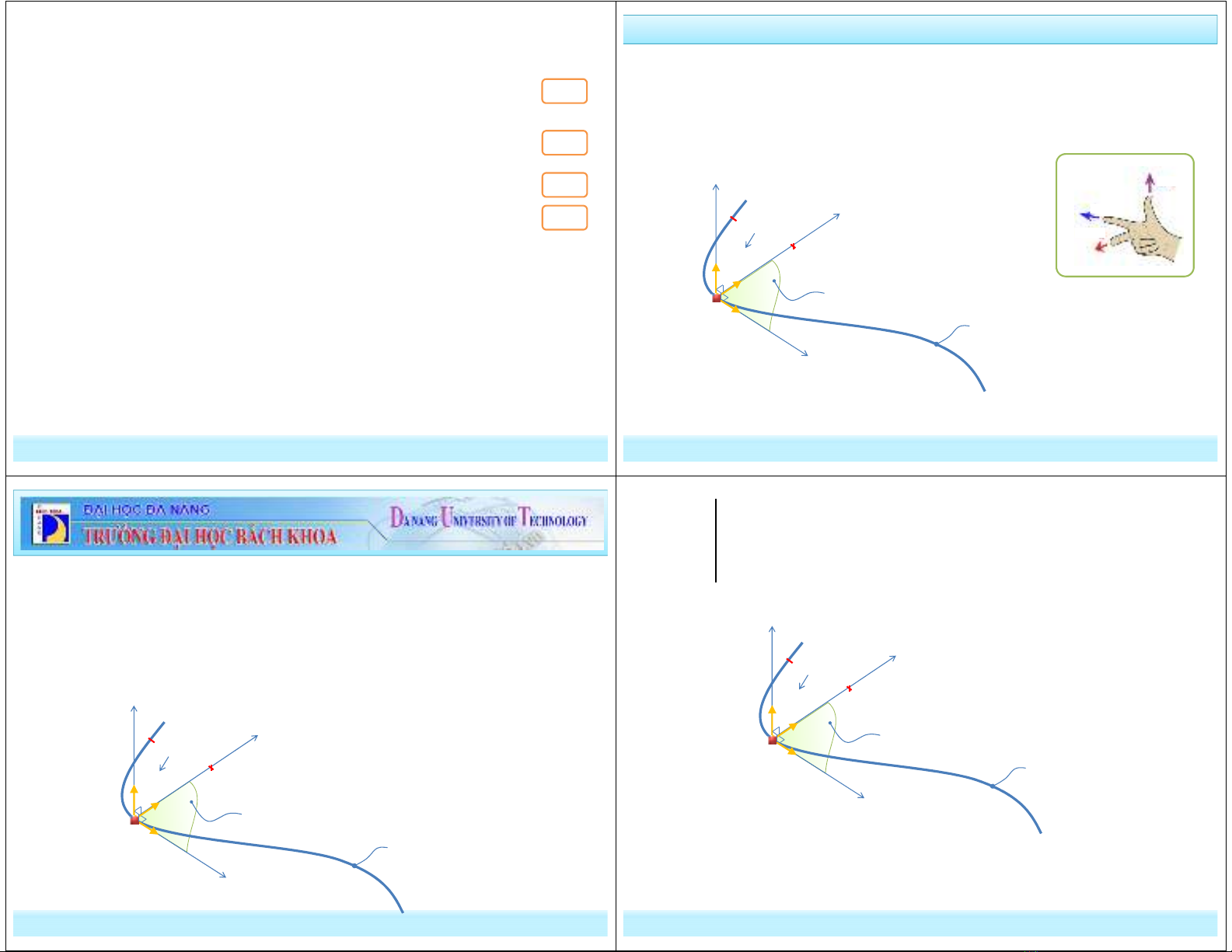
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 227
Mặt phẳng mật tiếp
Công thức véc tơ:
v
Theo phương tiếp tuyến, hướng chuyển động
( )
( ) ( )
dr t
v t r t
dt
= =
ɺ
Độ lớn: (tốc độ)
( )
v r t
=
ɺ
+ Đơn vị: (m/s)
3.2
3.3
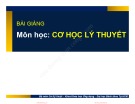
2. Vận tốc của động điểm M
M
r
v
=
ɺ
Qũy đạo chuyển động
r
O
Cố định
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 228
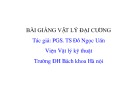
Mặt phẳng mật tiếp
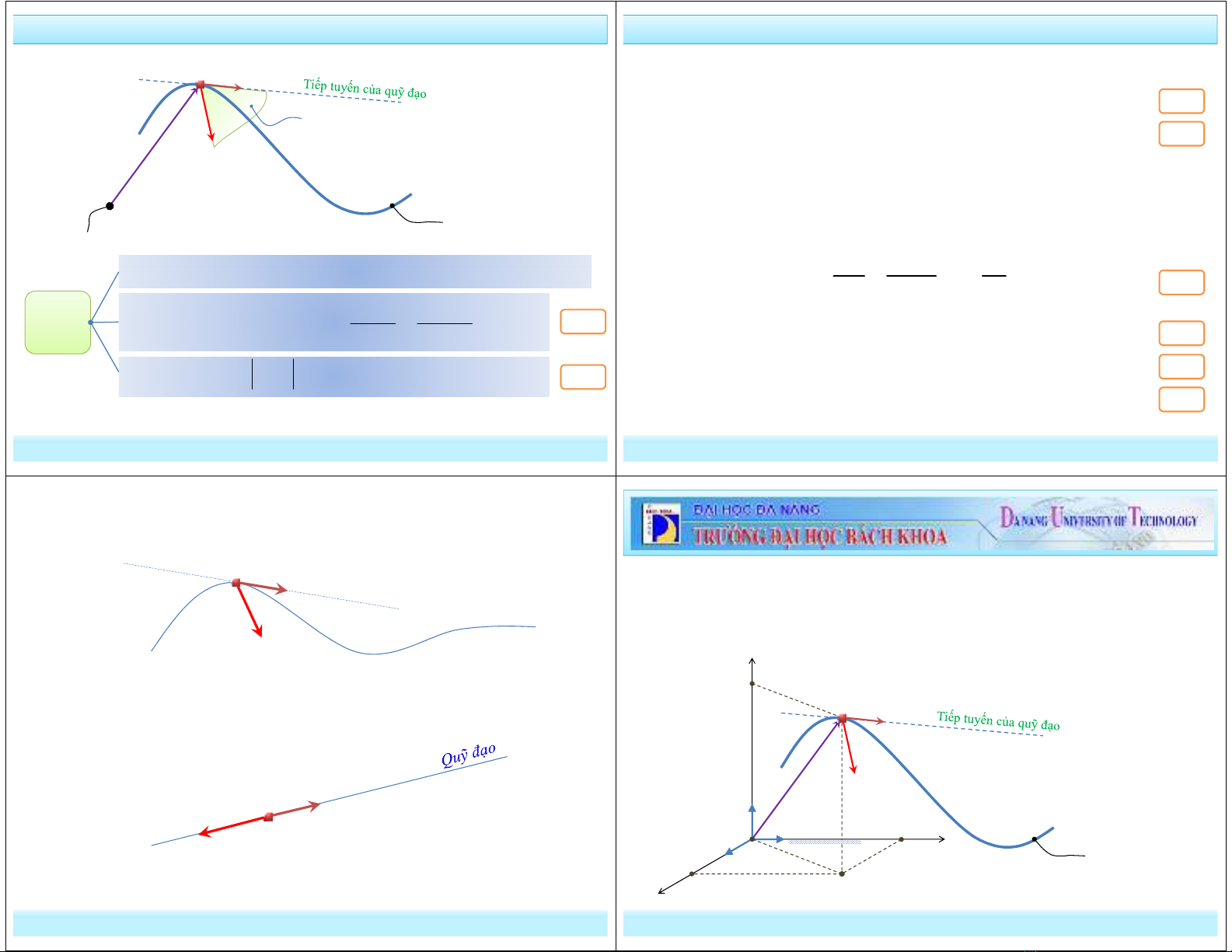
3. Gia tốc của động điểm M
Công thức véc tơ:
a
Trong mp mật tiếp, hướng về phía lõm của quỹ đạo tại M
2
2
( ) ( )
( ) ( )
dr t d r t
a t r t
dt dt
= = =
ɺ
ɺɺ
Độ lớn:
( )
a r t
=
ɺɺ
+ Đơn vị: (m/s2)
3.4
3.5
M
r
v
=
ɺ
Qũy đạo chuyển động
r
r
a
=
ɺɺ
O
Cố định
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 230
4. Tính chất chuyển động
+ Quỹ đạo chuyển động tại M là thẳng hay cong
. : Quỹ đạo tại M là thẳng
. : Quỹ đạo tại M là cong
0
v a
∧ =
0
v a
∧ ≠
3.6a
3.6b
+ Chuyển động nhanh dần, chậm dần hay đều: phụ thuộc vào tính
đơn điệu của tốc độ v của vận tốc. Tính đơn điệu của v cũng chính là tính
đơn điệu của v2. Để khảo sát tính đơn điệu của v2 ta xét dấu đạo hàm cấp
1 của v2 theo thời gian t:
. : M chuyển động đều
. : M chuyển động nhanh dần
. : M chuyển động chậm dần
2 2
( )
2 2 .
dv d v dv
v v a
dt dt dt
= = =
. 0
v a
=
. 0
v a
>
. 0
v a
<
3.7
3.7a
3.7b
3.7c
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 229
* Mối quan hệ phương của vận tốc và phương của gia tốc
+ Trường hợp quỹ đạo tại M là cong
+ Trường hợp quỹ đạo tại M là thẳng
v
a
M
(Không cùng phương với nhau)
Quỹ đạo
v
a
M
(Cùng phương với nhau – theo phương quỹ đạo)
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 231
§2. Khảo sát chuyển động của điểm bằng
phương pháp tọa độ Descartes
M
r
v
=
ɺ
Qũy đạo chuyển động
r
O
z
x
y
i
j
k
( )
z t
( )
x t
( )
y t
r
a
=
ɺɺ
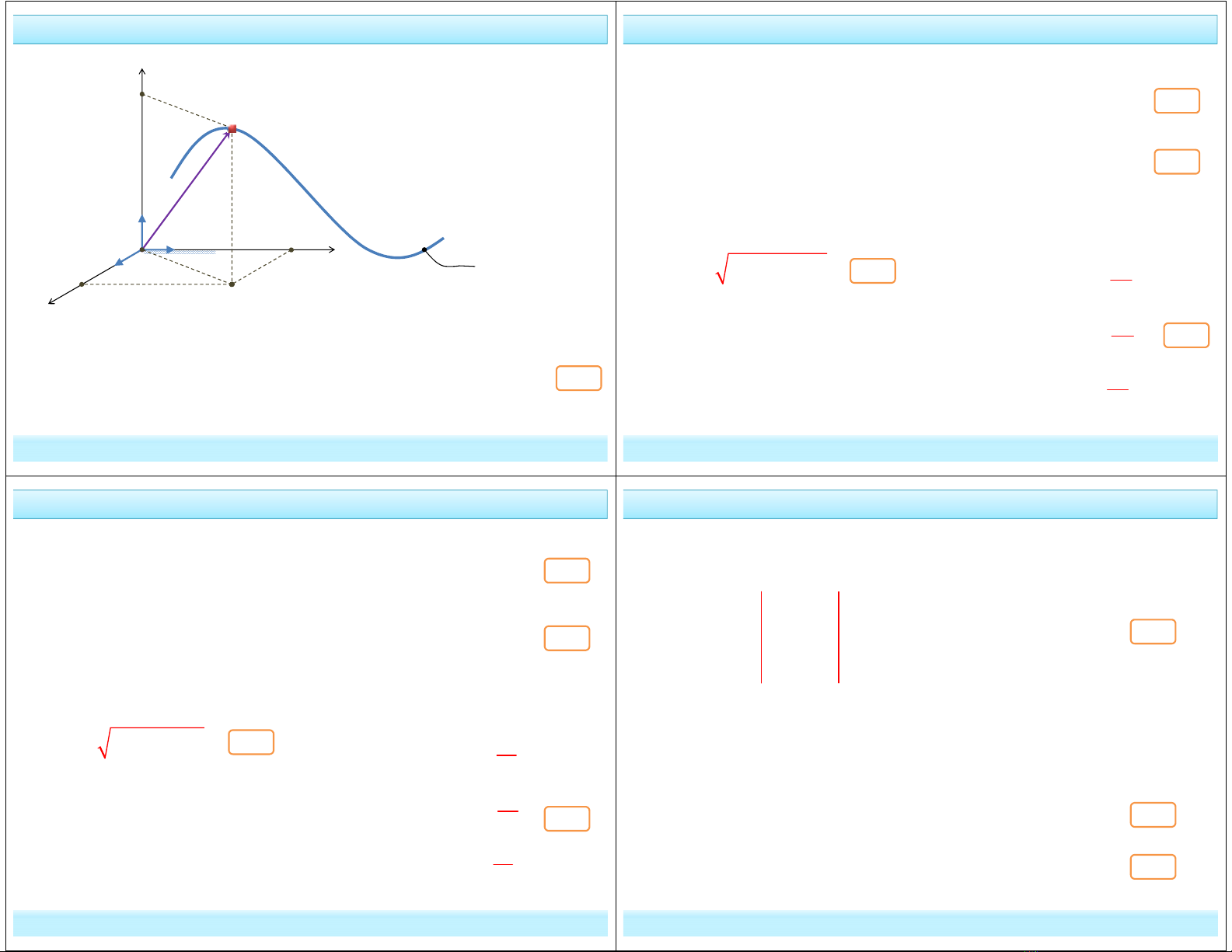
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 232
1. Phương trình chuyển động của M trong hệ trục Oxyz
M
Qũy đạo chuyển động
r
O
z
x
y
i
j
k
( )
z t
( )
x t
( )
y t
A
B
C
( ). ( ). ( ).
OM r OA OB OC
x t i y t j z t k
= = + +
= + +
( ), ( ), ( )
x x t y y t z z t
= = =
3.8
* Phương trình chuyển động theo 3 phương:
* Véc tơ định vị M:
Khử t trong phương trình chuyển động thì được phương trình quỹ đạo
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 234
3. Gia tốc của động điểm M
( ) ( ) ( ). ( ). ( ).
a t r t x t i y t j z t k
= = + +
ɺɺ
ɺɺ ɺɺ
ɺɺ
( , , )
x y z
a a a a
=
( )
( )
( )
x
y
z
a x t
a y t
a z t
=
=
=
ɺɺ
ɺɺ
ɺɺ
, với
2 2 2
x y z
a a a a
= + +
+ Véc tơ gia tốc và tọa độ của nó
+ Độ lớn của gia tốc
+ Các cosin chỉ phương của gia tốc
*
*
*
( , )
( , )
( , )
x
y
z
a
cos Ox a cos
a
a
cos Oy a cos
a
a
cos Oz a cos
a
α
β
γ
= =
= =
= =
3.10
3.10a
3.10b
3.10c
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 233
2. Vận tốc của động điểm M
( ) ( ) ( ). ( ). ( ).
v t r t x t i y t j z t k
= = + +
ɺ
ɺ ɺ
ɺ
( , , )
x y z
v v v v
=
( )
( )
( )
x
y
z
v x t
v y t
v z t
=
=
=
ɺ
ɺ
ɺ
, với
2 2 2
x y z
v v v v
= + +
+ Véc tơ vận tốc và tọa độ của nó
+ Độ lớn của vận tốc
+ Các cosin chỉ phương của vận tốc
( , )
( , )
( , )
x
y
z
v
cos Ox v cos
v
v
cos Oy v cos
v
v
cos Oz v cos
v
α
β
γ
= =
= =
= =
3.9
3.9a
3.9c
3.9b
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 235
4. Tính chất chuyển động
+ Quỹ đạo chuyển động tại M là thẳng hay cong:
x y z
i j k
v a x y z C i C j C k
x y z
∧ = = + +
ɺ ɺ ɺ
ɺɺ ɺɺ ɺɺ
3.11
. : Quỹ đạo tại M là thẳng
. : Quỹ đạo tại M là cong
3.11a
3.11b
0
v a
∧ =
0
v a
∧ ≠
2 2 2
0 0
x y z
C C C v a
⋅ + + = ⇒∧ =
2 2 2
0 0
x y z
C C C v a
⋅ + + ≠ ⇒∧ ≠
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 236
. : M chuyển động đều
. : M chuyển động nhanh dần
. : M chuyển động chậm dần
. 0
v a
=
. 0
v a
>
. 0
v a
<
3.12a
3.12b
3.12c
+ Chuyển động nhanh dần, chậm dần hay đều:
. . . .
v a x x y y z z
= + +
ɺ ɺɺ ɺ ɺɺ
ɺ ɺɺ
3.12
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 238
Mặt phẳng mật tiếp
1. Hệ trục tọa độ tự nhiên:
+ Tại động điểm M, dựng hệ trục tam diện thuận (Mτnb). Trong đó
mp(Mτn) thuộc mặt phẳng mật tiếp của quỹ đạo tại M.
+ Chọn O là gốc cố định trên quỹ đạo xác định trước.
τ
n
b
O
+
−
M
τ
n
b
τ
n
b
I
(Tiếp tuyến)
(Pháp tuyến)
(Trùng pháp tuyến)
Quỹ đạo chuyển động
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 237
Mặt phẳng mật tiếp
§3. Khảo sát chuyển động của điểm bằng phương
pháp tọa độ tự nhiên
Phương pháp tọa độ tự nhiên được áp dụng khi biết trước
quỹ đạo chuyển động.
O
+
−
M
τ
n
b
τ
n
b
I
(Tiếp tuyến)
(Pháp tuyến)
(Trùng pháp tuyến)
Quỹ đạo chuyển động
GV Huỳnh Vinh – ĐHBK Đà Nẵng Lưu hành nội bô Slide 239
Mặt phẳng mật tiếp
:
:
:
M nb n
b
τ
τ
Tiếp tuyến theo chiều dương của quỹ đạo
Pháp tuyến hướng vào bề mặt lõm của quỹ đạo
Trùng pháp tuyến của quỹ đạo
+ I là tâm cong quỹ đạo tại M
+ IM = ρ là bán kính cong của quỹ đạo tại M
+ 1/ρ là độ cong
O
+
−
M
τ
n
b
τ
n
b
I
(Tiếp tuyến)
(Pháp tuyến)
(Trùng pháp tuyến)
Quỹ đạo chuyển động



















![Đề thi học kì 2 môn Vật lí 1 năm 2023-2024 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/64291778553454.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/1381778553461.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2022-2023 có đáp án [kèm PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/21778553462.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)