
1
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
CHAPTER
3
Cơ học kỹ thuật: ĐỘNG HỌC
Engineering Mechanics: KINEMATICS
Động học vật rắn
phẳng
Nguyễn Quang Hoàng
Bộ môn Cơ học ứng dụng
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-2-
Nội dung
Định nghĩa, ví dụ, mô hình
Các đặc trưng động học của vật rắn chuyển động phẳng
• Vận tốc và gia tốc điểm cực
• Vận tốc góc và gia tốc góc của vật rắn chuyển động phẳng
Vận tốc và gia tốc các điểm thuộc vật
• Phân tích chuyển động tuyệt đối
• Phân tích chuyển động tương đối
• Định lý hình chiếu vận tốc
Tâm vận tốc tức thời / phân bố vận tốc
Truyền động hành tinh, vi sai phẳng
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-3-
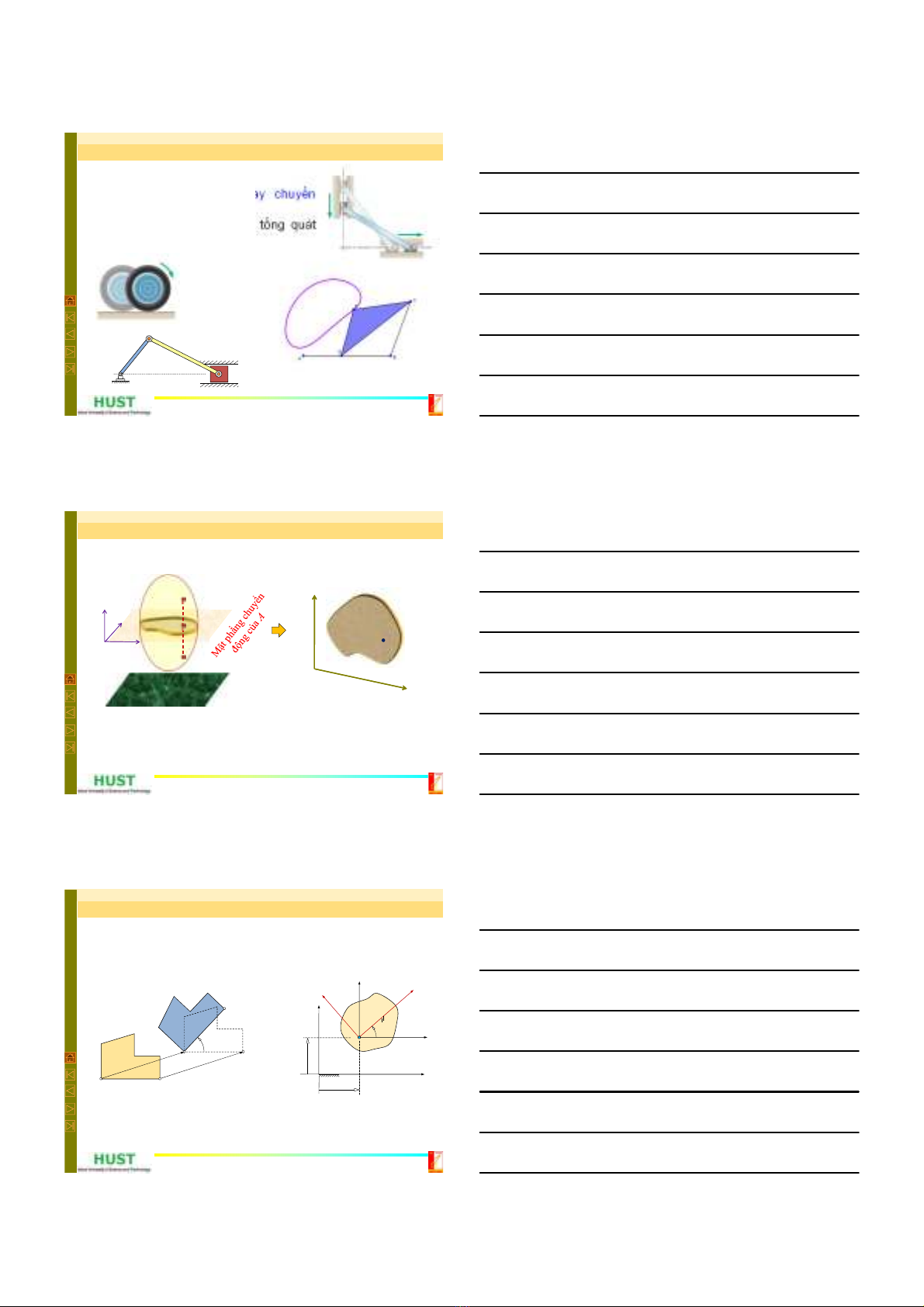
1. Định nghĩa, ví dụ, mô hình
Định nghĩa
.Chuyển động của vật rắn là chuyển động phẳng,nếu
mỗi điểm thuộc vật chỉ chuyển động trong một mặt phẳng xác
định song song với một mặt phẳng qui chiếu cố định.
Ví dụ
AB
DC
A
C
B
1. Chuyển động tịnh tiến (thẳng hoặc cong) trong mặt phẳng,
2. Chuyển động quay quanh trục cố định,
3. Chuyển động phẳng tổng quát [chuyển động song phẳng]
2
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-4-
1. Định nghĩa, ví dụ, mô hình
1. CĐ tịnh tiến trong mặt phẳng,
2. CĐ quay quanh trục cố định,
3. CĐ phẳng tổng quát [hay chuyển
động song phẳng]
Ví dụ về chuyển động phẳng tổng quát
[hay chuyển động song phẳng]
A
C
B
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-5-
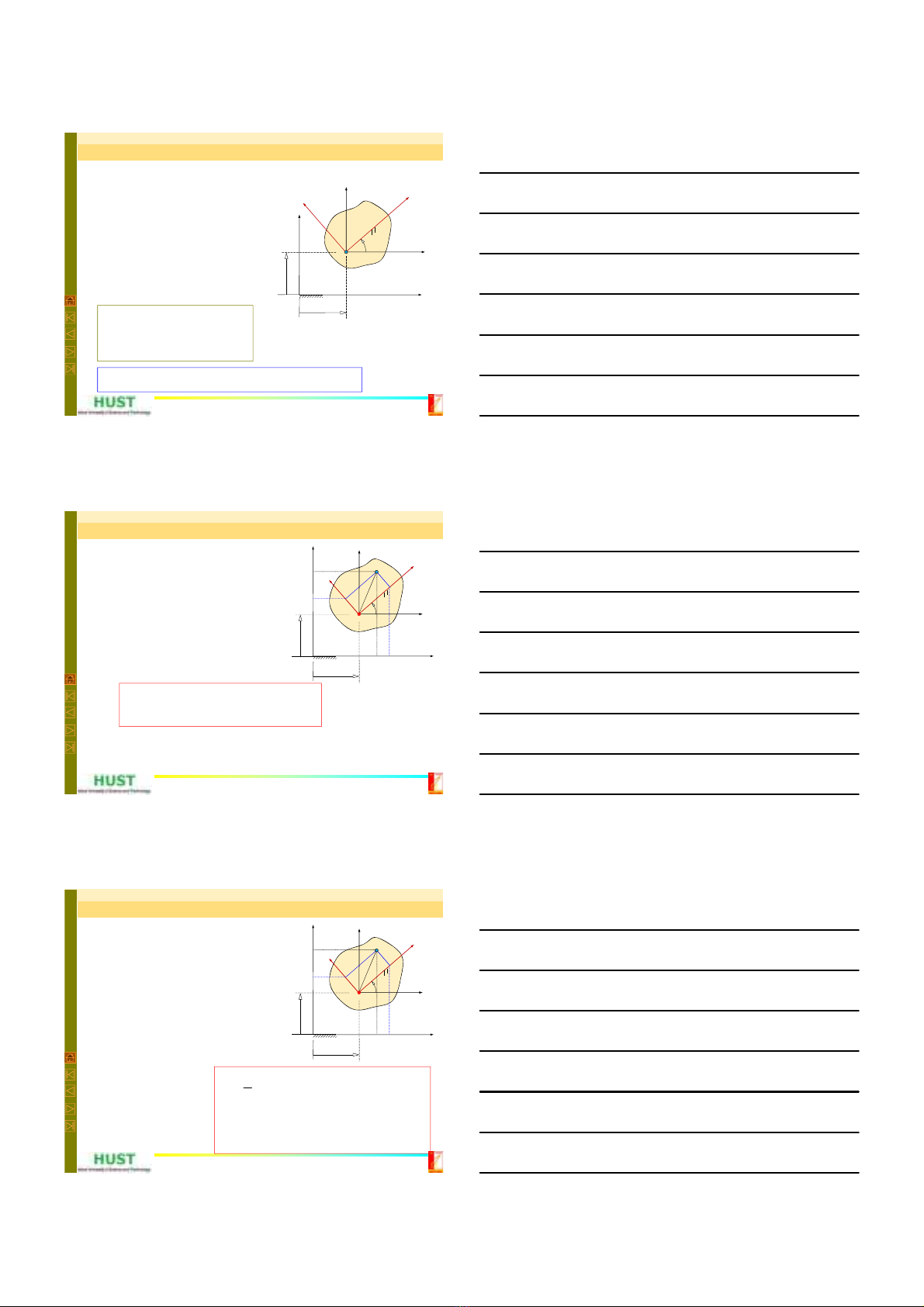
1. Định nghĩa, ví dụ, mô hình
Mô hình khảo sát
Mặt phẳng qui chiếu
A
M
N
B
y
x
A
S
Chuyển động phẳng của
hình phẳng S
x
y
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-6-
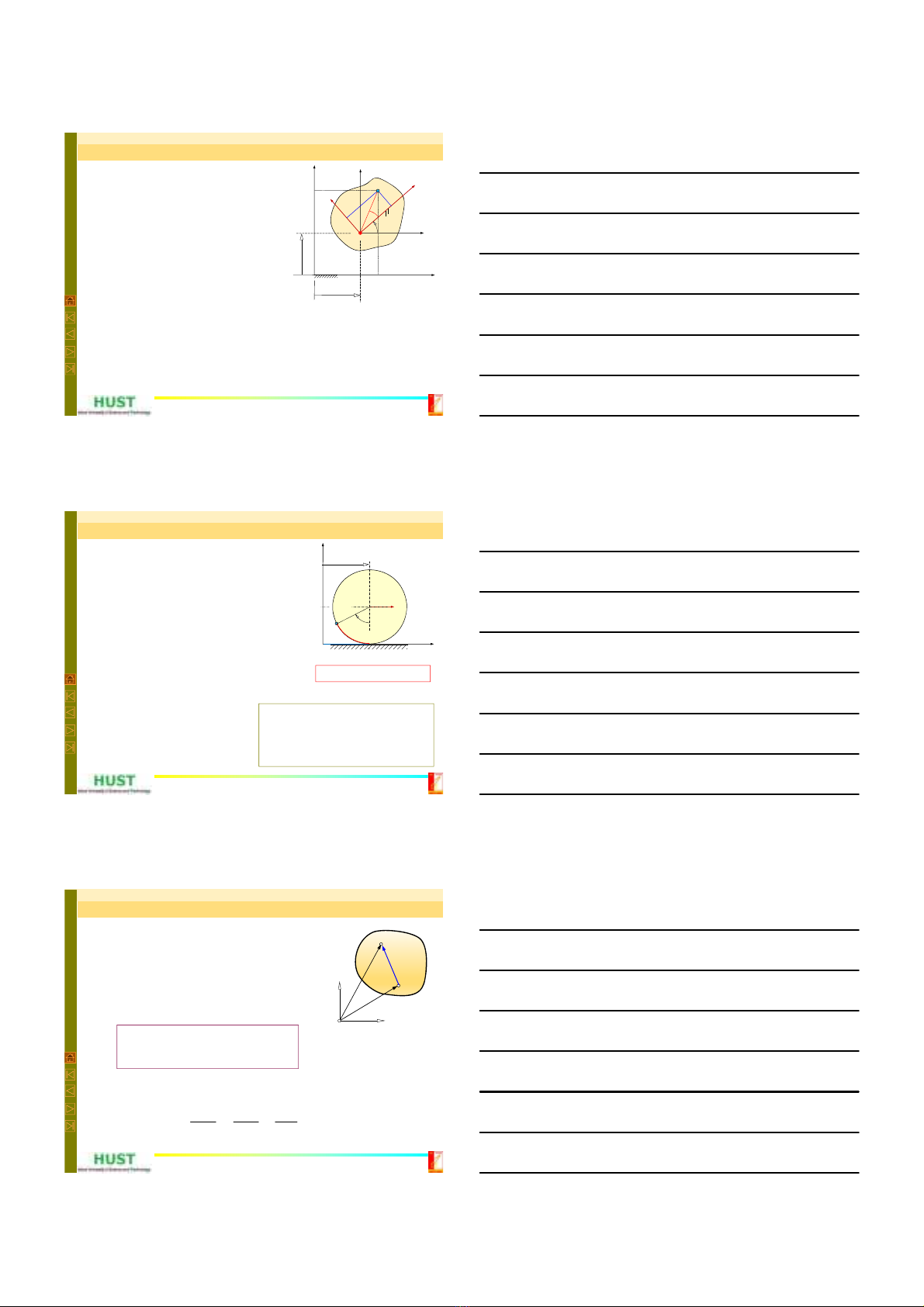
2. Khảo sát chuyển động của toàn vật
Chuyển động song phẳng hay chuyển động phẳng tổng quát
(general planar motion) là tổng hợp của chuyển động tịnh tiến
trong mặt phẳng và chuyển động quay quanh trục vuông góc
với mặt phẳng đó.
O
y0
x0
Ax1
x2
y2
y1
yA
xA
1
B
A
B
A1
B1
I
II
I’
Các thông số định vị: [thông số xác định vị trí của vật]
(,,)
AA
xyj
(,)
A
rj
3
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-7-
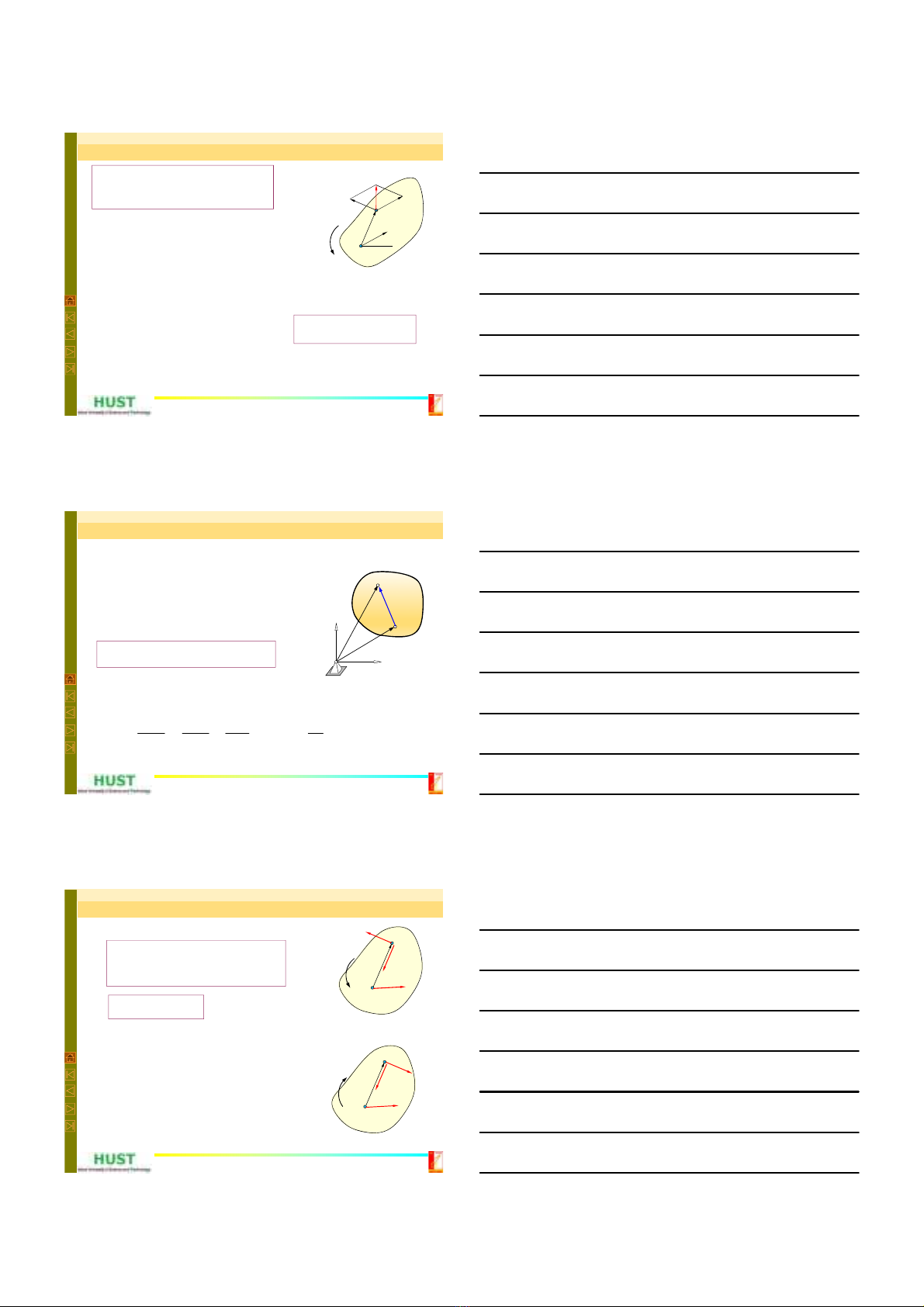
2. Khảo sát chuyển động của toàn vật
{(),()},
,()
AA A
z
vxtyt
etwj wj==
O
y0
x0
Ax1
x2
y2
y1
yA
xA
Phương trình chuyển động
(), (),
()
AA
xxtyyt
tjj
==
=
Các đặc trưng động học
{(),()}, ,
AA A z
axtyt eaj aj==
Lưu ý rằng, ba thông số trên có thể
độc lập hoặc phụ thuộc nhau.
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-8-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tuyệt đối
cos sin
sin cos
BA
BA
xx
yy
xjhj
xjhj
=+ -
=+ + O
y0
x0
Ax1
x2
y2
y1
yA
xA
B
xB
yB
Cho biết (), (), ()
AA
xtyt tj
Xác định chuyển động của điểm B
thuộc tấm. Tọa độ của B trong hệ
Ax2y2gắn liền tấm (,) = const.
Từ hình vẽ ta tính được vị trí của B
trong hệ cố định
(sin cos)
(cos sin )
BA
BA
xx
yy
jx j h j
jx j h j
=+- -
=+ -
2
2
(sin cos) (cos sin)
(cos sin ) ( sin cos )
BA
BA
xx
yy
jx j h j j x j h j
jx j h j j x j h j
=+- - +- +
=+ - +- -
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-9-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tuyệt đối
cos sin
sin cos
( )
BA
BA
BA
xx
yy
rr A u
jjx
jjh
j
éù éù é ùéù
-
êú êú ê úêú
=+
êú êú ê úêú
êú êú ê úêú
ëû ëû ë ûëû
=+
()
BA
rrAuj=+
()
BA
rrAuj=+
cos sin
sin cos
BA
BA
xx
yy
xjhj
xjhj
=+ -
=+ +
Trình bày dạng ma trận:
2
sin cos
cos sin
sc cs
cs sc
d
dt
AA
A
jj
jjj
jj jj
jj
jj jj
éù
--
êú
==
êú
-
êú
ëû
éùéù
-- -
êúêú
=+
êúêú
---
êúêú
ëûëû
O
y0
x0
Ax1
x2
y2
y1
yA
xA
B
xB
yB
4
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-10-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tuyệt đối
cos( )
:sin( )
BA
B
BA
xx
ryy
rjb
rjb
ì
ï=+ +
ï
í
ï=+ +
ï
î
Vị trí điểm B trong hệ cố định
O
y0
x0
Ax1
x2
y2
y1
yA
xA
B
xB
yB
Trường hợp vị trí của B trên tấm được
cho bởi khoảng cách = AB và góc .
sin( )
:cos( )
Bx B A
B
By B A
vxx
vvyy
rj j b
rj j b
ì
ï==- +
ï
í
ï==+ +
ï
î
2
2
sin( ) cos( )
:cos( ) sin( )
Bx B A
B
By B A
axx
aayy
rj j b rj j b
rj jb rj jb
ì
ï==- +- +
ï
ï
í
ï==+ +- +
ï
ï
î
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-11-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tuyệt đối
O
y0
x0
R
yA
xA
B
A
P
xAvà phụ thuộc nhau
sin
cos
BA
B
xxR
yRR
j
j
=-
=-
Ví dụ, đĩa tròn bán kính R lăn không
trượt trên đường ngang, biết luật chuyển
động xA(t). Xác định chuyển động của
điểm B. Ban đầu B trùng gốc O.
Tọa độ điểm B trong hệ cố định
()
() ()/
A
A
xOPPBRt
txtR
j
j
===
=
()
() sin[ ()/ ]
1cos[()/]
,
BA A
BA
BB
xxtRxtR
yR xtR
va
=-
=-
Do đĩa lăn không trượt
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-12-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tương đối
2.1 Vậntốcmộtđiểmbấtkỳthuộcvậtrắn
Định lý 1. Nếu biết vận tốc góc và vận
tốc một điểm A nào đó thuộc vật rắn đó,
thì vận tốc một điểm P bất kỳ thuộc vật
rắn B được xác định bởi hệ thức sau
,
PA
APA PA
vv u
vv v u
w
w
=+´
=+ =´
Chứng minh. Đạo hàm quan hệ vị trí theo thời gian ta suy ra:
RR
R
PA
PA P A
dr dr du
rru vv u
dt dt dt w=+ = + = +´
y
x
O
u
A
r
P
r
A
P
Chính là vận tốc của P trong
chuyển động quay quanh A
5
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-13-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tương đối
Lưu ý, đối với chuyển động song phẳng uw^
PA
vu
u
w=´
^
nằm trong mặt phẳng tấm
u
P
v
A
v
PA
v
A
v
w
,
PA
APA PA
vv u
vv v u
w
w
=+´
=+ =´
()
PA A
vu v uu vuw⋅= +´ ⋅= ⋅
Hệ quả. Định lý hình chiếu vận tốc.
Hình chiếu vận tốc hai điểm trên đường nối hai điểm đó luôn bằng
nhau.
uP uA
hc v hc v=
A
P
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-14-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tương đối
2.2 Gia tốcmộtđiểmbấtkỳthuộcvật
Định lý 2.Nếu biết vận tốc góc, gia tốc góc
củavậtrắnBvàgiatốcmộtđiểmAnàođó
thuộc vật, thì gia tốc một điểm P bất kỳ
thuộc vật rắn B được xác định bởi hệ thức
()
PA
aa u uaww=+´+´´
Chứng minh. Đạo hàm quan hệ vận tốc theo thời gian ta suy ra:
Theo định nghĩa vận tốc góc và gia tốc góc ta suy ra công thức trên.
RR
RR
PA
dv dv dd
uu
dt dt dt dt
ww=+´+´
y
x
O
u
A
r
P
r
A
P
Chương 3. Động học vật rắn phẳng – Planar Kinematics of a Rigid Body
Nguyễn Quang Hoàng-Department of Applied Mechanics-SME
-15-
3. Chuyển động của điểm thuộc vật: phân tích CĐ tương đối
Lưu ý, đối với chuyển động song phẳng
,uwa^
(
)
2
t
PA
n
PA
auu
auu
a
ww w
=´^
=´ ´ =-
()
PA
tn
APAPA
aa u u
aa a
aww=+´+´´
=+ +
Chiều quay gia tốc góc
ngược chiều kim đồng hồ
tn
PA PA PA
aaa=+
Chiều quay gia tốc góc
cùng chiều kim đồng hồ
u
t
PA
a
A
a
an
PA
a
A
P
u
t
PA
a
A
a
an
PA
a
P
A
Chính là gia tốc của P trong
chuyển động quay quanh A.








![Bài giảng Đại cương về kỹ thuật Trường Đại học Kỹ thuật Công nghiệp [Tài liệu đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250107/nienniennhuy44/135x160/3791736217643.jpg)



![Bài giảng Ứng dụng tin học trong Kỹ thuật phương tiện thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251216/anhquangvu03@gmail.com/135x160/12021765937860.jpg)



![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)





