http://www.ebook.edu.vn
CHƯƠNG 7
ĐỘNG LỰC HỌC MÁY LÀM ĐẤT
7.1. Những vấn đề cơ bản về động lực học máy đào - vận chuyển đất
7.1.1. Khái niệm chung
Máy làm đất làm việc với đối tượng đất luôn luôn thay đổi, lực cản tác
dụng lên bộcông tác cũng thay đổi liên tục theo thời gian do đất không đồng
nhất, bềmặt thi công nhấp nhô, kết cấu và trạng thái kỹthuật của máy không ổn
định... Do tất cả các nguyên nhân đã nêu trên, các trởlực và lực kéo, lực tác
dụng giữa bộ công tác và đất, giữa bộmáy di chuyển và đất thay đổi khác nhau
đối với các loại máy làm đất khác nhau.
Đối với máy đào - vận chuyển đất, nếu gọi X là quãng đường di chuyển
theo phương ngang, A là hệ số đặc trưng cho sự thay đổi của lực cản từ đất
(cường độ biến đổi trởlực cản) tác dụng lên bộcông tác thì:
¦1
0
1
0
x
x
k
x
x
k
k
AdxFAdxF
dx
dF
A
(Nếu A không phụthuộc vào x)
Và: x.A)xx(AF 01k
Trong đó: FK– Lực cản từ đất tác dụng lên bộcông tác
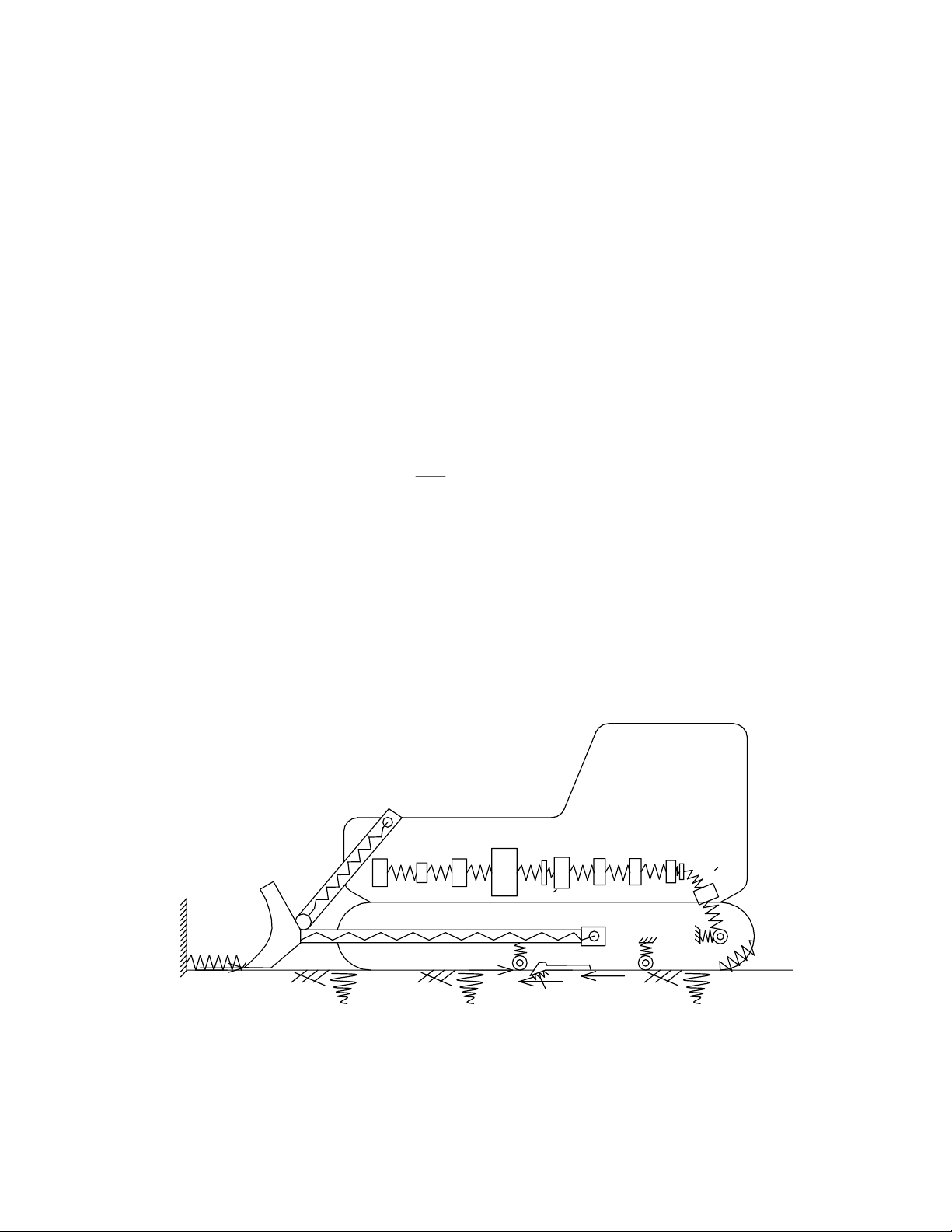
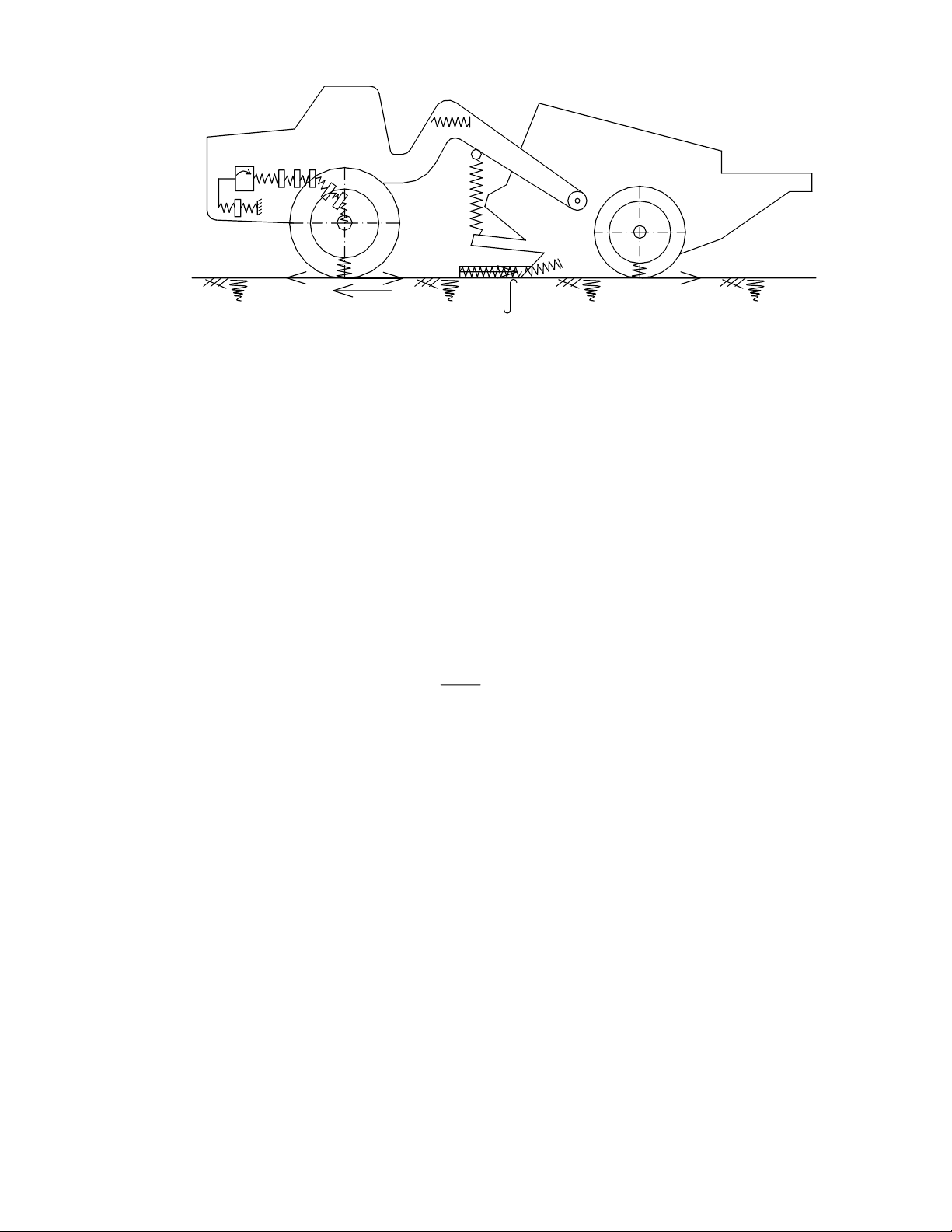
Mô hình động lực học của máy ủi và máy cạp có thểbiểu diễn như sau:
Trong đó:
FK
A=dFK/dS mme
SV
FfS9
TT
Sme
St
m
S9
S7
J7
SK
J11 J12 J13 J1J2
J3J4J5
J6
S11 S12 S13 S1S1S2S3S4
S5
S5
S9
Hình 7
–
1.
Mô hình động lực học của máy ủi
http://www.ebook.edu.vn
Ji– Các mô men quán tính của các chi tiết và cụm máy
Si–Các độ cứng quy dẫn
Các giảthiết:
- Chúng ta quy dẫn mô men quán tính của các chi tiết máy quay vềkhâu
dẫn.
- Bỏqua biến dạng đàn hồi của nền và chuyển dịch theo phương thẳng
đứng gây ra.
- Smlà độ cứng của bộcông tác bao gồm cảphần độ cứng khi chịu biến
dạng do tải trọng theo phương ngang.
+ Phương trình chuyển động như sau:
1f
2
rFF)x(Txm
r
I
(7-1)
Trong đó:
Ir– Mô men quán tính quy dẫn của tất cảcác chi tiết máy quay vềtrục của
bánh sao chủ động
T – Lực kéo, là hàm của vận tốc
Ff– Lực cản di chuyển
F1– Lực cản do biến dạng của nền
r – Bán kính quy dẫn
m – Khối lượng của máy
+ Nếu coi máy như hệ 1 khối lượng, phương trình chuyển động có thểviết
dưới dạng sau:
0x.mFF reh
(7-2)
Với:
Fh– Lực chủ động
Fe– Các lực cản
mr– Khối lượng quy dẫn của máy
S
V
S
7
S
1
S
2
S
3
S
4
S
5
S
6
S
Kz
S
Kt
S
S
V
S
me
TT
F
f
F
K
= Adx
m2+mt(x)
C
Kt
P
f
J
K
J
K
J
K
J
3
J
2
J
1
M
f
M
f
Hình 7
–
2.
Mô hình động lực học của máy cạp
http://www.ebook.edu.vn
+ Nếu coi lực bám là lực tới hạn của lực kéo để đảm bảo máy làm việc
không bị trượt thì phương trình chuyển động (2) ởtrên có thểviết dưới dạng
khác:
0x.mFT e
(7-3)
Với: T- Lực bám của máy
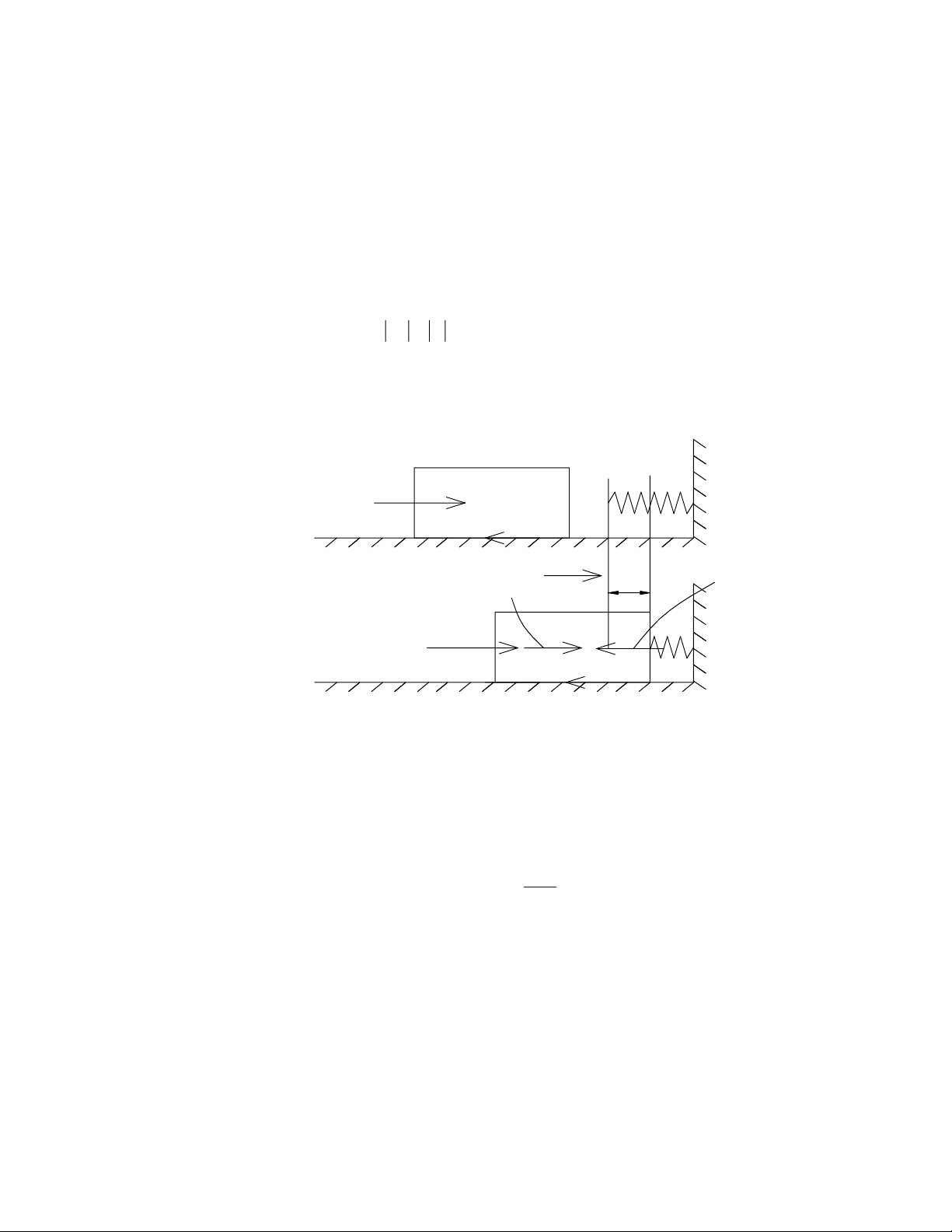
7.1.2. Khảo sát sơ đồ máy đào – vận chuyển đất như hệ một khối lượng quy
kết có độ bám tốt.
Nếu trịsốtuyệt đối cảu độ cứng kết cấu máy lớn hơn hệ số đặc trưng cho
sự thay đổi lực cản, tức là ASmthì chúng ta có thể coi máy đào – vận chuyển
đát như một khối lượng mrchuyển động.
Sơ đồ khảo sát như sau:
Phương trình chuyển động khi máy gặp vật cản, độ bám tốt như sau:
0
dt
xd
mFF 2
2
reh (7-4)
Với: Fh= Ff ; v = v0
Trong đó:
Fh– Lực kéo; Ff– Lực cản di chuyển;
Fk– Lực cản từ đát tác dụng lên bộcông tác;
v – Vận tốc máy; v0– Vận tốc ban đầu
Tổng lực cản Fexác đinh như sau:
)x(FFAxFF kffe
(7-5)
Trong trường hợp tổng quát khi máy di chuyển trên nền có độ dốc thì:
mr
Fh
Ff
v = vK = const
v
Fh(v)
Ff
mrdx/dt
FK = Ax
x
a)
b)
22
Hình 7
–
3.
Sơ đồ máy đào – vận chuyển đất như một khối lượng quy kết,
máy có độ bám tốt.
a) Trước khi gặp vật cản; b) Sau khi gặp vật cản
http://www.ebook.edu.vn
sin.Gcos.G.fFf
Với: G – Trọng lượng máy; -Độ dốc của nền; f – Hệsốcản di chuyển
Lực động lớn nhất khi:
sin.Gcos.G.fFf
Khi:
sin
.
G
cos
.
G
.
f
thì: Ff= 0
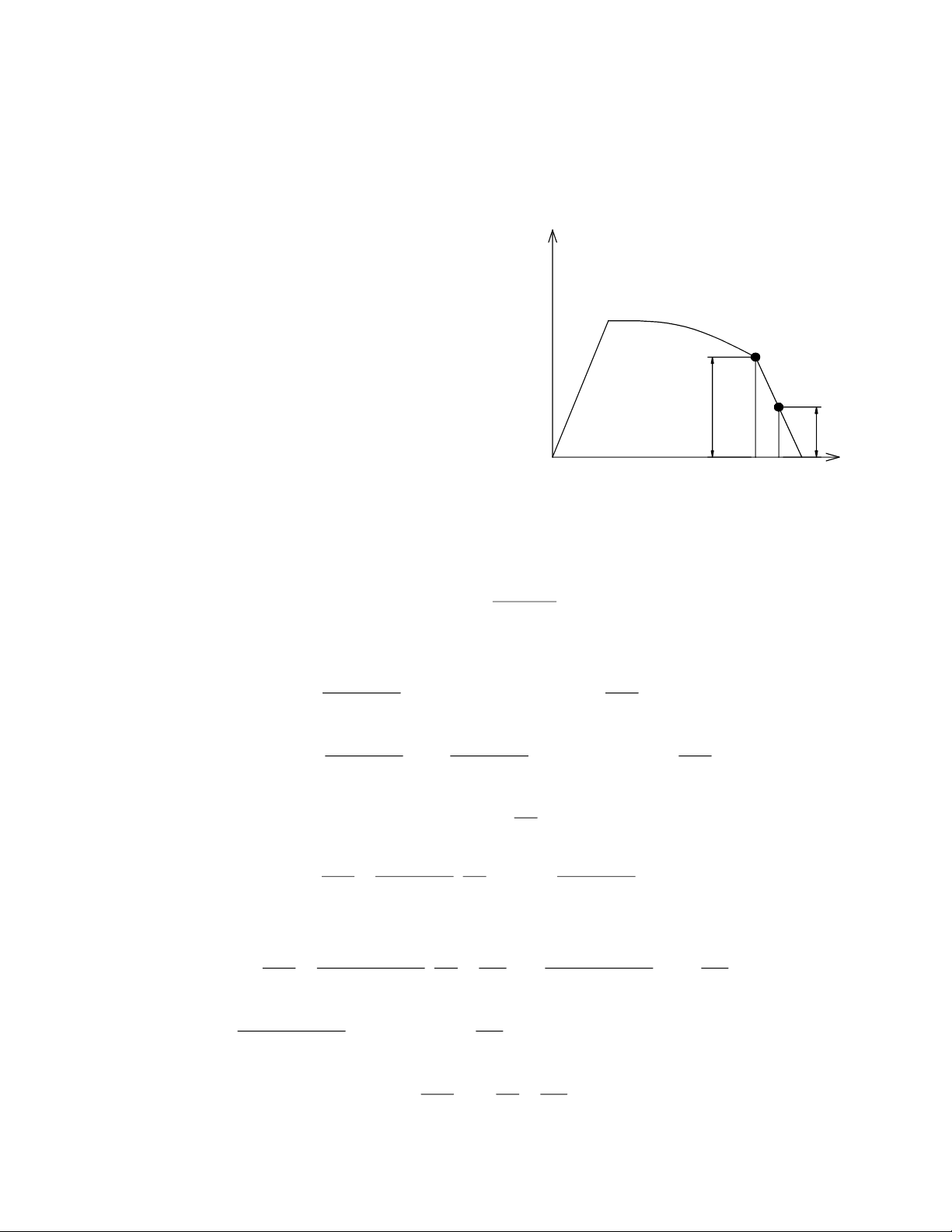
Từ đồ thị đường đặc tính cơ của động cơ,
chúng ta có công thức tính lực kéo Fh tại
một thời điểm bất kỳ khi máy đang làm
việc với vận tốc ổn định v (trong đoạn
vn– v0)
Với: Tn, vn– Lực kéo và vạn tốc tại thời
điểm bắt đầu giai đoạn làm việc ổn định;
v0– vận tốc đồng bộ.
)vv(
vv
T
TF 0
n0
n
h
(7-6)
Thay công thức (5), (6) vào biểu thức (4) và biến đổi chúng ta có:
0
dt
xd
mx.AF)vv(
)vv(
T
2
2
rf0
n0
n
Hay: 0
dt
xd
mx.AFv
)vv(
T
v.
)vv(
T
2
2
rf
n0
n
0
n0
n
Chuyển vế phương trình trên và chú ý
dt
dx
vta có:
f0
n0
n
n0
n
2
2
rFv.
)vv(
T
x.A
dt
dx
.
)vv(
T
dt
xd
m
Chia 2 vếcho mrta có:
r
t
0
rn0
n
rr0
n
2
m
F
v.
m).vv(
T
x.
m
A
dt
dx
.
m).vnv(
T
dt
xd
Đặt
rn0
n
m).vv(
T
G
và
r
t
0m
F
v.GD phương trình trên trởthành:
Dx.
m
A
dt
dx
.G
dt
xd
r
2
(7-7)
Tn
T
vnvv0
v
o
T
Hình 7
–
4.
Đường đặc tính cơ của máy
http://www.ebook.edu.vn
Phương trình (7-7) chính là phương trình vi phân cấp hai tuyến tính, hệsốhằng.
Nghiệm của phương trình có dạng quen biết:
A
m.D
e.Ne.Nx r
t
2
t
1
21 (N1, N2là các hằng số)
Để xác định các hằng số, chúng ta sửdụng điều kiện biên:
t = 0; x = 0 và
dt
dx
Vk
Chúng ta có công thức xác định chuyển dịch, vận tốc, gia tốc như sau:
+ Chuyển dịch:
A
m.D
e.
r
A
m.D
.V
e.
r
A
m.D
.V
xr
t.
r
1k
t
r
2k
21
+ Vận tốc:
t
2k
t
t1k 21 e.
r
D.V
e.
r
D..V
v
+ Gia tốc:
t
2
2k
t
1
t1k 21 e..
r
D.V
e.
r
D..v
a
Lực tác dụng lên bộcông tác:
x.AFk
hoặc a.mFTF rfk
; (a - Gia tốc)
(Giá trịcủa A có thểtra trong tài liệu chuyên ngành về máy làm đất).
7.1.3. Khảo sát sơ bồ máy đào - vận chuyển đất như hệ một khối lượng quy
kết bị trượt hoàn toàn (độ bám đạt trịsốgiới hạn).
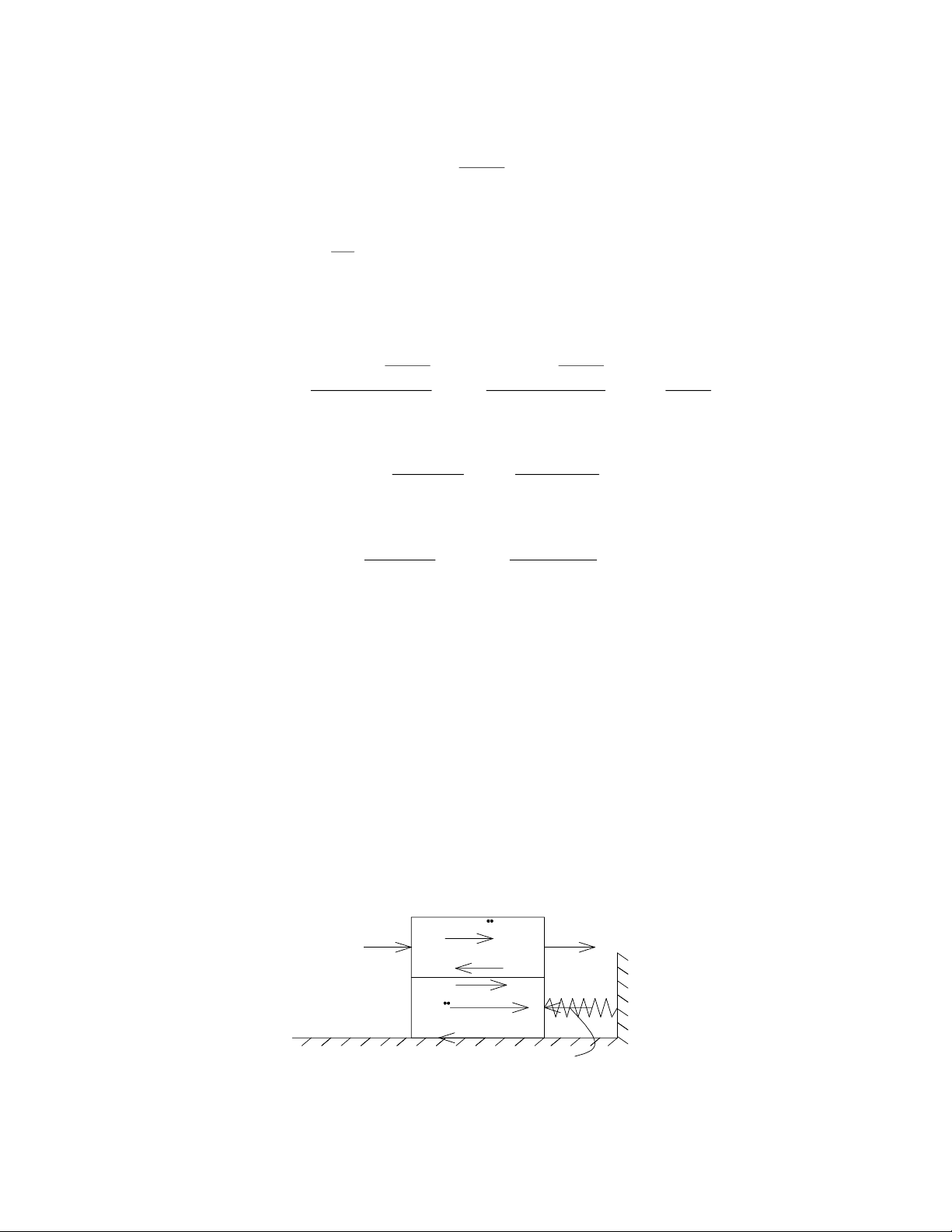
Trên hình 7.5 thểhiện mô hình khảo sát máy đào - vận chuyển đất như
một khối lượng quy kết bị trượt. Khối lượng quy kết mrcủa máy có thểchia làm
2 phần. Phần trên gồm khối lượng quy kết của các phần quay của động cơ và hệ
thống truyền động gồm cảcác bộphận của bộmáy di chuyển, ký hiệu (mr- m).
Phần dưới là khối lượng còn lại.
Điều kiện xảy ra trượt:
Tx)mm(F rh (7-8)
Hình 7
–
5.
Sơ đồ máy đào – vận chuyển đất như một khối lượng quy
k
ế
t b
ị
trư
ợ
t (đ
ộ
bám đ
ạ
t tr
ị
s
ố
t
ớ
i h
ạ
n)
mx
F
f
F
h
T
T
(m
r
-m)x v
Fe=Ax+Ax
o


![Các loại máy thi công xây dựng không thể thiếu [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20200526/lanqiren/135x160/6901590455715.jpg)


![Bảng giá ca máy và thiết bị chuyên dùng khảo sát, thí nghiệm [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2020/20200526/lanqiren/135x160/8121590455736.jpg)
















![Gia Công & Lắp Đặt Cốt Thép: Kỹ Thuật Xây Dựng Bê Tông [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/58891780257145.jpg)
![Gia Công Ván Khuôn: Lắp Dựng, Tháo Dỡ và Kỹ Thuật Xây Dựng [Chi Tiết A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/4261780257147.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)